具身智能中的传感器技术10——IMU技术0
IMU(惯性测量单元)是具身智能的"存在之锚",在机器人能力金字塔中处于最基础位置。它通过三个关键作用确保机器人稳定运作:首先,为视觉感知提供去抖和坐标系校准;其次,作为灵巧操作的动态支点,实时调节重心平衡;最后,作为最高优先级的"反射弧",在紧急情况下实现毫秒级安全响应。这种"基础优先"原则体现了机器人学的生存哲学——只有站稳脚跟,才能
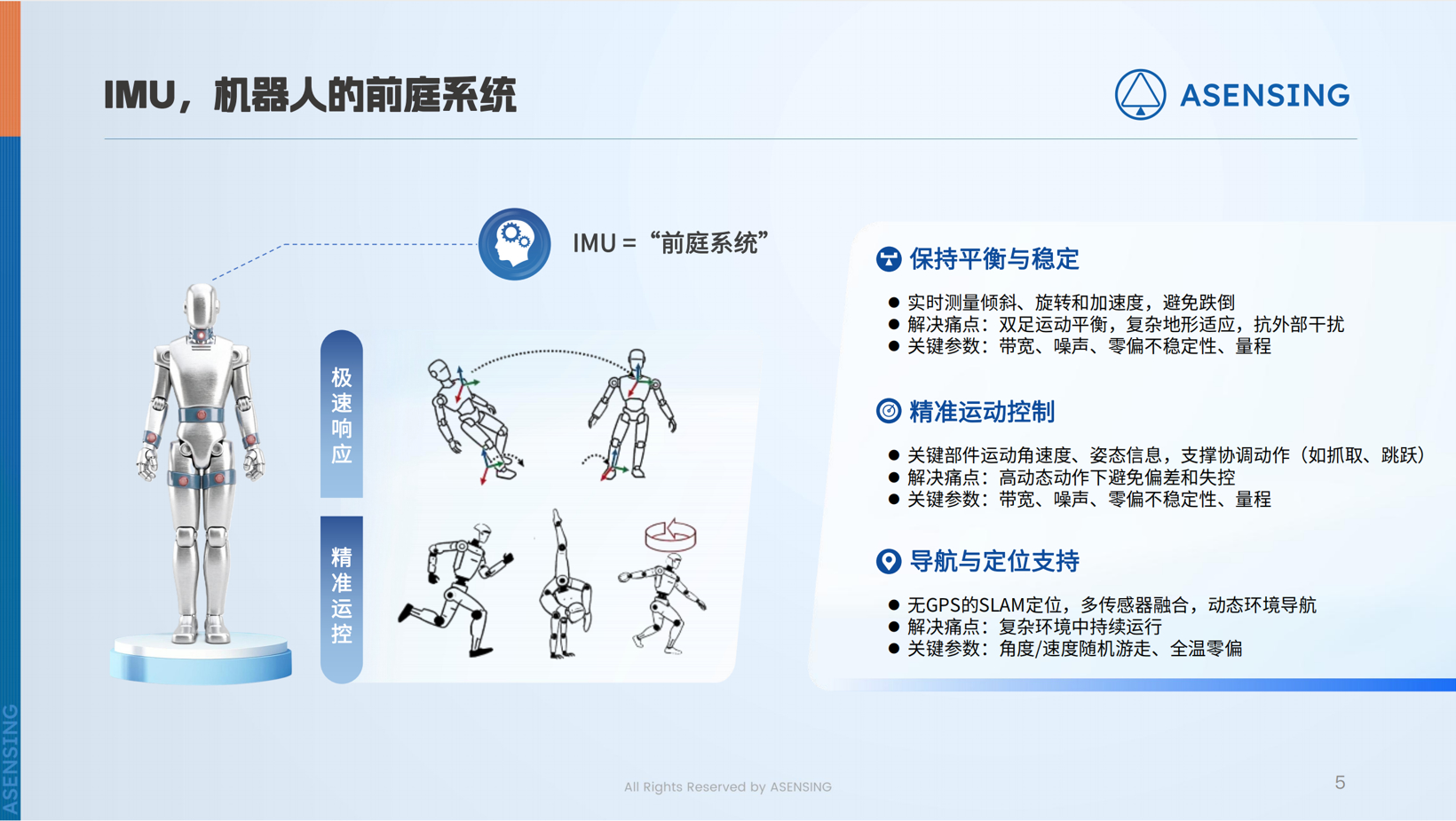
IMU(惯性测量单元)是具身智能的"存在之锚",在机器人能力金字塔中处于最基础位置。它通过三个关键作用确保机器人稳定运作:首先,为视觉感知提供去抖和坐标系校准;其次,作为灵巧操作的动态支点,实时调节重心平衡;最后,作为最高优先级的"反射弧",在紧急情况下实现毫秒级安全响应。这种"基础优先"原则体现了机器人学的生存哲学——只有站稳脚跟,才能有效感知环境和执行任务,使IMU成为具身智能从0到1的关键硬件基础。
为什么第一个先介绍IMU,因为先要站稳了才能去干别的事,包括感知外界和进行工作
这不仅仅是一个技术排序问题,而是具身智能的“生存哲学”。在机器人学中,这被称为**“基础优先(Foundational Priority)”**原则。
我们可以把具身智能的能力看作一个金字塔,IMU 就在金字塔的最底座。如果底座不稳,上层的大模型、视觉感知、灵巧操作全都会崩塌。
以下详细拆解为什么**“先站稳”**是感知外界和进行工作的前提:
1. 站稳是“看清世界”的前提 (Stability for Perception)
如果机器人晃晃悠悠,它的“眼睛”(摄像头/雷达)也是废的。
- 消除运动模糊 (Motion Blur):
- 如果机器人走路时头部剧烈晃动,摄像头拍出来的画面就会全是重影(像你在颠簸的车上看手机一样)。
- IMU 的作用: 视觉算法(VIO/SLAM)必须依赖 IMU 的数据来**“去抖”**。IMU 告诉算法:“这一毫秒我向左倾斜了 2 度”,算法就能在图像上把这 2 度的偏差修补回来,保证画面是稳定的。
- 统一世界坐标系:
- 激光雷达扫描出来的点云是相对于机器人身体的。如果身体歪了,扫出来的墙也是歪的,建出来的地图就是扭曲的。
- IMU 的作用: 提供绝对的重力方向(Gravity Vector)。无论机器人怎么歪,IMU 都能告诉雷达:“哪边是正下方”,从而把歪斜的地图校正过来。
2. 站稳是“动手干活”的支点 (Stability for Manipulation)
古希腊科学家阿基米德说过:“给我一个支点,我可以撬动地球。”对于机器人来说,身体就是那个支点。
- 浮动基座 (Floating Base) 问题:
- 传统工业机器人是钉在水泥地上的(Fixed Base),底盘稳如泰山,手臂随便甩。
- 人形机器人是**“浮动基座”**。当机器人伸出手臂去抓一个 5kg 的重物时,身体重心(CoM)会瞬间前移。
- IMU 的作用:
- IMU 实时感知躯干是否因为手臂伸出而发生了微小的前倾。
- 一旦检测到前倾,控制系统会立刻命令脚踝发力、屁股后撅,产生一个反向力矩来平衡手臂的重量。
- 如果没有 IMU: 手刚伸出去,机器人就会因为重心失稳,直接**“脸着地”**摔下去,更别提干活了。
3. 站稳是“系统安全”的最后底线 (Stability for Safety)
在系统启动顺序和优先级上,IMU 也是最高的。
- 反射弧优先级:
- 视觉/大模型: 就像大脑皮层,处理速度慢(30Hz - 50Hz),思考需要时间。
- IMU 平衡控制: 就像小脑和脊髓反射,处理速度极快(1000Hz)。
- 生死攸关:
- 当机器人踩到电线快滑倒时,必须在 10-20毫秒 内做出反应。这时候根本来不及让摄像头拍照、上传给大模型思考、再下发指令。
- 只有 IMU 能在瞬间感知加速度突变,直接触发底层的**“反射式平衡策略”**,先救命,再思考。
总结
IMU 是机器人的“存在之锚”。
- 有了它,机器人才能确立自己在物理世界中的姿态(Pose)。
- 有了稳定的姿态,视觉才能对齐坐标,手臂才能有发力的支点。
所以,在介绍具身智能硬件时,IMU 必须是第一个登场的,它是“从 0 到 1”的那个 1。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 14
14 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)