机器人动力学与控制学习笔记(十四)————RBF网络自适应控制
二自由度机械臂RBF神经网络控制自适应
十四、基于模型整体逼近的机器人RBF网络自适应控制
14.1 机械臂模型
设n关节机械臂方程为:
(1)
设计跟踪误差为:
(2)
定义误差函数为:
(3)
其中,则
(4)
其中
实际模型中,模型不确定项为未知,因此需要对不确定项
进行逼近。
采用RBF网络逼近,根据
的表达式,网络输入取
设计控制律为
(5)
其中为RBF网络对
的估计值。
14.2 控制器设计
采用RBF网络逼近,则RBF神经网络的输出为:
设计控制律为:
其中为用于克服神经网络逼近误差
的鲁棒项。
将上式控制律代入式(4)得:
其中。
14.3 对不确定项 进行RBF网络逼近
进行RBF网络逼近
控制律取:
鲁棒项设计为
。
被控对象中的项可以写为:
其中,
采用RBF网络,可以对中的各项分别进行逼近:
则
其中
14.4 Simulink仿真
Simulink中的控制框图如下:
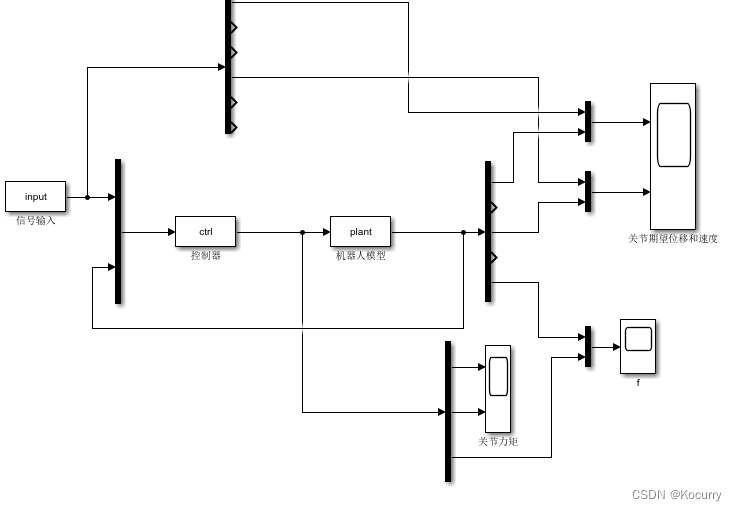
仿真结果如下:

上图分别是关节1和2的期望轨迹和实际轨迹,从图中可以看出,在设计好RBF控制律、调节好参数后,关节1和关节2的轨迹拟合程度很好,可以达到预期。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 11
11 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)