UR5机器人仿真 机械臂simulink simscape 正向运动学,逆向运动学 关节空间轨迹规划
UR5机器人仿真 机械臂simulink simscape 正向运动学,逆向运动学 关节空间轨迹规划 五次多项式轨迹规划 笛卡尔空间轨迹规划 直线插补 还包含机器人工具箱建立的模型对比
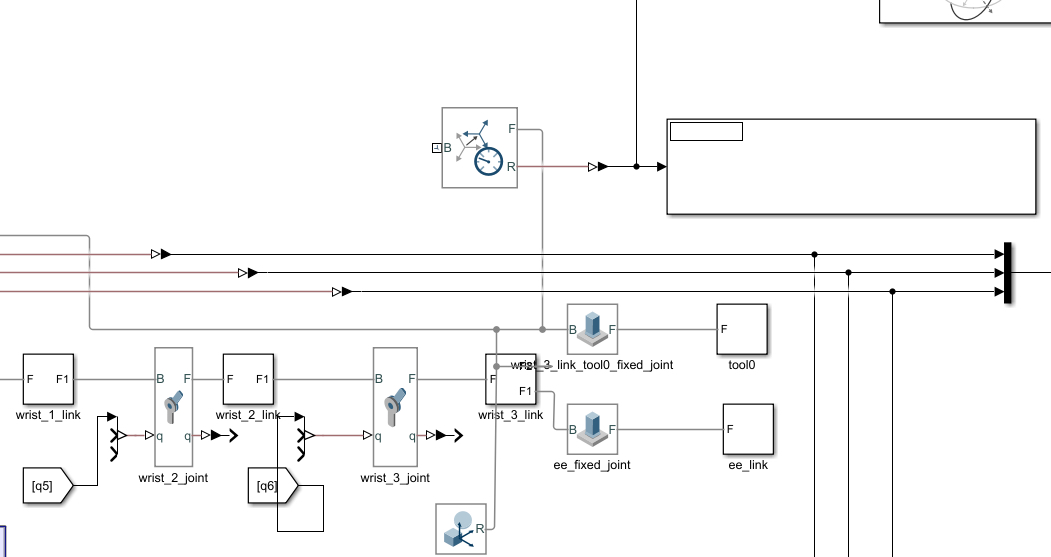
在工业机器人开发中,仿真验证是绕不开的"前菜"。今天咱们以UR5机械臂为例,用MATLAB全家桶搞点有意思的仿真实验。先来张全家福:Simulink搭建物理模型,机器人工具箱负责算法验证,Simscape实现多体动力学——这组合拳打起来是真香。
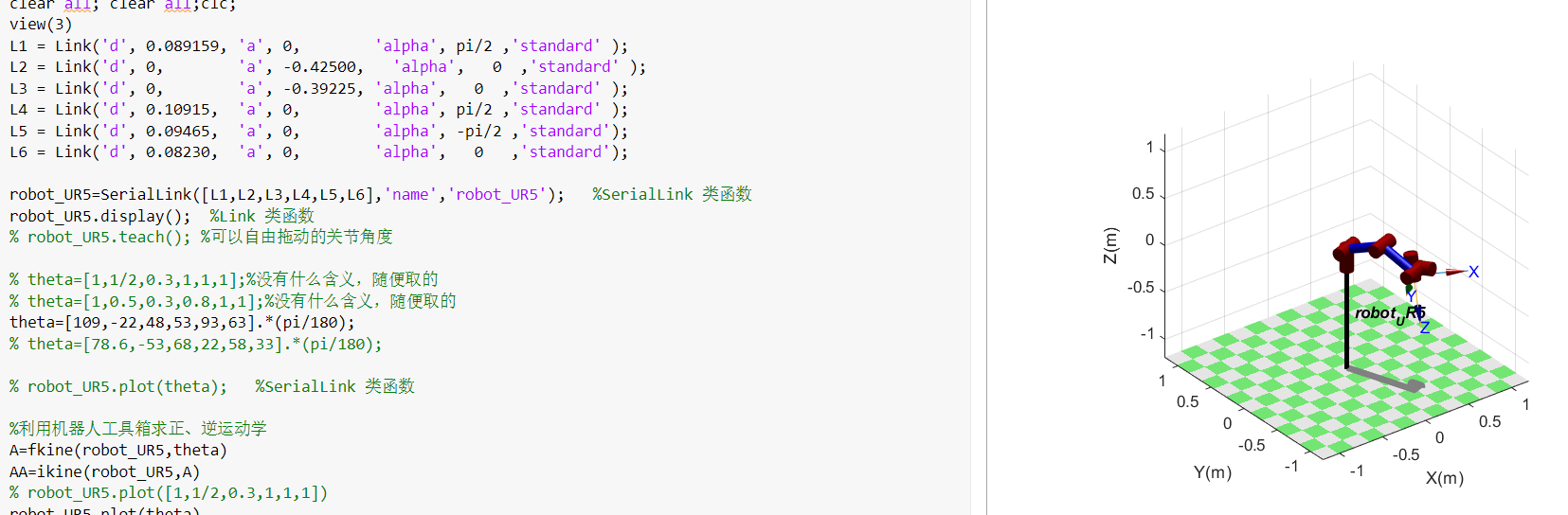
先看正运动学怎么玩转。UR5的DH参数就像它的身份证,咱们用代码给它刻个章:
L(1) = Link([0 0.089159 0 pi/2 0]);
L(2) = Link([0 0 -0.425 0 0]);
L(3) = Link([0 0 -0.39225 0 0]);
L(4) = Link([0 0.10915 0 pi/2 0]);
L(5) = Link([0 0.09465 0 -pi/2 0]);
L(6) = Link([0 0.0823 0 0 0]);
ur5 = SerialLink(L, 'name', 'UR5');这六个Link对象把机械臂的骨架搭得明明白白。想要看它摆pose?直接ur5.teach()调出交互界面,拖动滑块就能看到关节角变化时的形态。
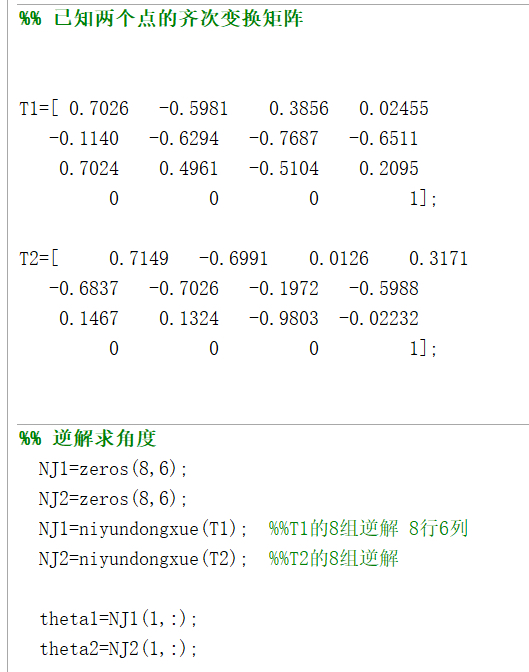
逆运动学更有意思,像在解几何谜题。工具箱的ikine函数能帮我们找到目标位姿对应的关节角:
T = transl(0.4, 0.2, 0.5) * trotx(pi/3); % 目标位姿
q = ur5.ikine(T, 'mask', [1 1 1 0 0 0]); % 求解关节角度
disp(q); % 输出可能解之一这里mask参数像筛子,决定哪些自由度需要严格匹配。有时候会遇到多解的情况,记得用ikcon做约束优化。
UR5机器人仿真 机械臂simulink simscape 正向运动学,逆向运动学 关节空间轨迹规划 五次多项式轨迹规划 笛卡尔空间轨迹规划 直线插补 还包含机器人工具箱建立的模型对比
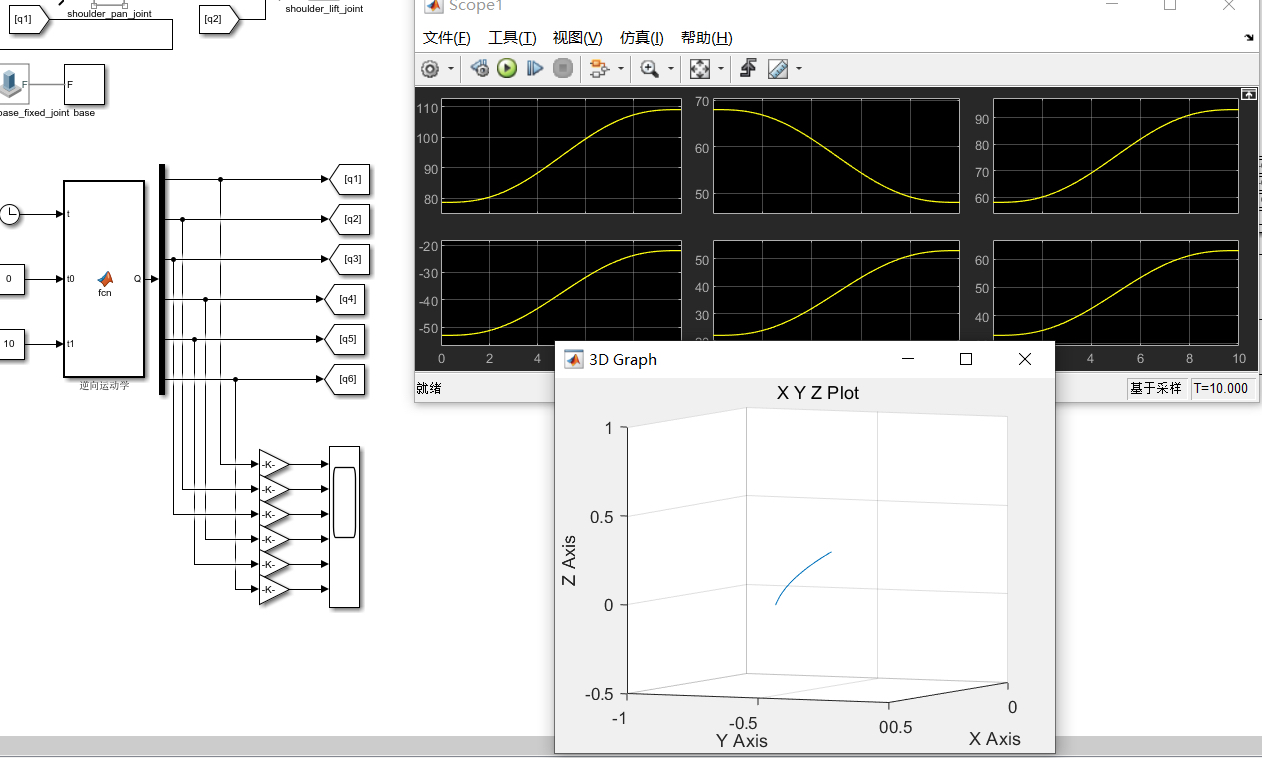
说到轨迹规划,五次多项式绝对是关节空间的"丝滑大师"。看这段规划代码:
t = linspace(0, 5, 100);
[q, qd, qdd] = jtraj(q_start, q_end, t); % 生成轨迹
ur5.plot(q, 'fps', 30); % 动画演示虽然表面就一行代码,背后却藏着位置、速度、加速度的连续变化。用subplot(3,1,1)分别绘制三条曲线,会发现加速度曲线没有突变,这对实际控制太重要了。
笛卡尔空间规划更考验插补功力。直线路径生成可以这样搞:
T_start = ur5.fkine(q_start); % 起点位姿
T_end = transl(0.5, 0.3, 0.6); % 终点位置
Ts = ctraj(T_start, T_end, 50); % 生成50个中间位姿
for i = 1:size(Ts,3)
q(i,:) = ur5.ikine(Ts(:,:,i), 'q0', q(i-1,:)); % 逆解计算
end
ur5.plot(q, 'trail', 'r') % 显示红色轨迹线这里ctraj生成的齐次矩阵序列,确保了末端沿直线运动。注意每次逆解都用前一个关节角做初始值,避免"跳关节"的诡异现象。
最后对比下两种建模方式:机器人工具箱模型像轻量级选手,秒出仿真结果;Simscape模型则像全副武装的战士,连电机齿隙、关节摩擦都能模拟。在Simulink里搭建物理模型时,记得在Configuration Parameters里把Solver选成ode15s——刚性系统专用求解器,否则仿真速度能让你等到怀疑人生。
仿真时发现个有趣现象:同样的轨迹规划,在理想模型和物理模型中的关节扭矩能差出20%。这提醒我们算法落地前,动力学补偿必须安排上。下次可以试试用rne函数计算动力学参数,给控制律加点"黑科技"。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)