【花雕学编程】Arduino BLDC 之带输出平滑滤波的模糊控制机器人
摘要: Arduino BLDC模糊控制机器人采用模糊逻辑决策与输出平滑滤波技术,结合BLDC电机的高效动力特性,实现复杂环境下的稳定控制。系统通过模糊规则库处理非确定性输入,降低建模复杂度;输出平滑滤波(如一阶低通滤波、移动平均)减少执行抖动,提升运动稳定性。适用于救援、农业、家庭服务等动态场景,具有强抗干扰性和自适应能力。开发时需注意规则库优化、传感器融合、实时性匹配及安全保护,如通过硬件隔离

Arduino BLDC之带输出平滑滤波的模糊控制机器人,是融合模糊逻辑智能决策、BLDC高效动力驱动与输出平滑处理技术的嵌入式控制系统。其核心通过模糊算法处理环境不确定性,结合输出平滑滤波消除执行波动,实现复杂工况下的稳定控制。以下从主要特点、应用场景及注意事项展开专业解析:
一、主要特点
模糊逻辑驱动的智能决策与平滑输出
模型无关性:模糊控制不依赖机器人动力学或环境的精确数学模型,通过语言变量(如“较近”“适中”“较远”)替代精确数值,将传感器数据转化为符合人类经验的模糊描述,大幅降低建模复杂度。
规则库驱动的决策:基于“If-Then”规则库实现仿人决策,规则库直接映射专家经验,无需复杂算法,开发周期短,且规则可灵活调整以适配不同场景。
输出平滑滤波:模糊推理输出的控制量通过重心法、查表法或滑动平均等技术处理,避免传统阈值切换的硬冲击,实现连续平滑的执行机构控制,减少BLDC电机的抖动和机械磨损,提升运动稳定性。
强环境适应性与鲁棒性
抗干扰能力:模糊逻辑对传感器噪声、测量误差具有天然容忍度,通过隶属度函数平滑处理数据跳变,避免因单一阈值误判导致的剧烈抖动,在动态环境中保持稳定避障或平衡。
参数自适应调节:高级模糊控制器可根据环境复杂度动态调整控制参数,如障碍物密集时自动切换至谨慎慢速模式,空旷区域提升速度,实现能耗与效率的平衡。
多任务动态调度:模糊逻辑可融合多传感器数据,对避障、导航、目标追踪等任务进行优先级动态仲裁,优先级权重连续变化,避免传统硬切换导致的系统抖动,实现平滑任务切换。
BLDC电机的高动态响应与执行效率
快速执行能力:BLDC电机具备高功率密度和快速启停特性,能毫秒级响应模糊控制器的加减速指令,配合差速驱动架构,可实现原地转向、急停等高难度动作,满足动态控制的实时性需求。
高效稳定运行:相比有刷电机,BLDC电机效率高、发热低、寿命长,在频繁启停的任务中避免过热衰减,确保长时间稳定运行,适配高动态平衡或避障场景。
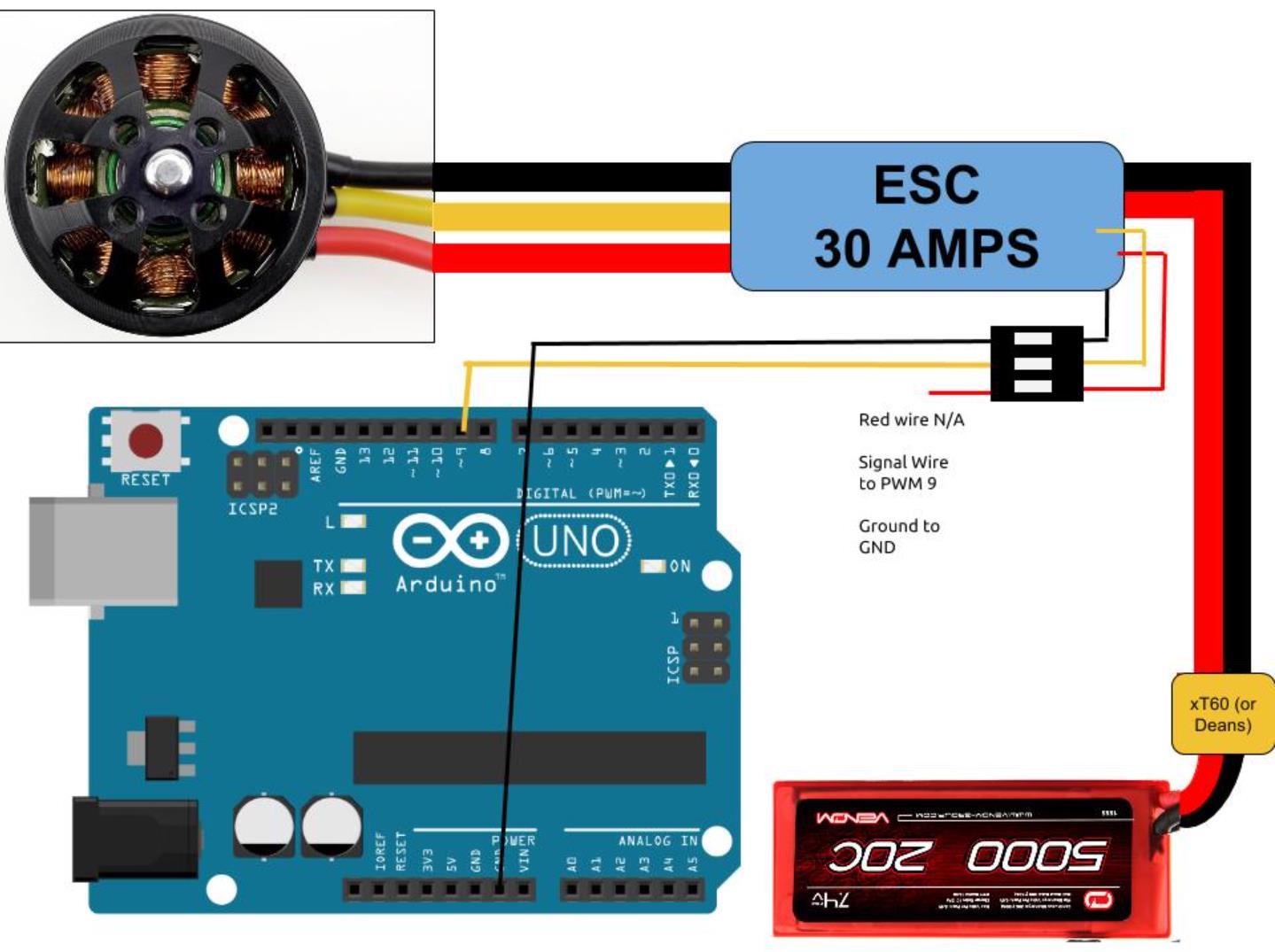
动力与控制的精准匹配:模糊控制器输出的平滑控制量直接映射至BLDC的PWM占空比或扭矩指令,结合FOC(磁场定向控制)等技术,实现电机转速、扭矩的精准闭环控制,支撑复杂工况下的动力补偿(如防跌倒、负载平衡)。
轻量化嵌入式实现与算力适配
算法轻量化:模糊控制无需复杂浮点运算,通过查表法、简化推理机(如MIN-MAX)实现快速推理,可在Arduino Uno/Nano等8位平台运行,满足嵌入式实时性要求;输出平滑滤波采用整数运算或预计算表,进一步降低算力负担。
硬件拓展性:Arduino丰富的接口与开源生态支持多传感器融合(IMU、超声波、激光雷达)、无线通信(蓝牙/WiFi)及电机驱动拓展,可快速构建“感知-决策-执行”一体化系统,兼顾开发效率与功能扩展。
二、应用场景
非结构化环境自主探索与救援
场景:地震废墟、洞穴、丛林等未知复杂环境,机器人需应对碎石、树木等动态障碍物,且无法依赖预设地图。
应用:模糊避障系统模拟人类经验决策,结合多传感器融合,在传感器数据不稳定时灵活调整避障策略;输出平滑控制确保机器人在崎岖地形平稳移动,避免因剧烈转向或急停导致倾覆,适用于搜救、勘探任务。
农业自动化作业
场景:农田巡检、喷洒机器人需在农作物、沟渠、动物等非规则障碍物间穿梭,环境动态且难以建模。
应用:模糊控制处理非刚性障碍物的模糊边界,动态调整避障力度与行驶速度;BLDC电机的高效驱动配合平滑输出,实现精准行间导航,避免重喷、漏喷,提升作业效率与作物保护效果。
家庭服务与智能移动设备
场景:家庭清洁、陪伴机器人需在家具、电线、宠物等动态障碍物中运行,环境拥挤且变化频繁。
应用:模糊逻辑的抗干扰能力确保机器人在复杂家庭环境中避免碰撞,输出平滑控制实现柔和转向与启停,提升用户体验;BLDC电机的低噪音、高精度特性适配家庭场景需求。
工业人机协作与智能物流
场景:车间或仓库中,AGV需与工人协同工作,人员随机移动导致传统路径规划失效。
应用:模糊避障系统实时感知人员与临时货物位置,动态调整行驶路径,输出平滑的加减速指令避免急停急启,保障人机协作安全;结合多任务调度,实现导航与避障的优先级动态切换,提升物流效率。
动态平衡与防跌倒机器人
场景:两轮自平衡车、足式机器人需应对负载变化、路面颠簸导致的倾倒趋势。
应用:模糊逻辑通过姿态传感器数据(倾角、角加速度)实时推理平衡补偿策略,输出平滑的电机扭矩指令,快速抵消倾倒趋势;BLDC电机的高响应速度支撑大角度倾倒容错,实现动态运动中的稳定平衡,适用于教育实训、代步工具等场景。
自适应负载平衡系统
场景:物流AGV搬运不同重量货物、机械臂抓取异形工件时,负载变化导致运动失稳。
应用:结合电流反馈与模糊规则,在线估计负载质量与重心,动态调整扭矩分配与PID参数,输出平滑的补偿扭矩,避免重载翘头、轻载振荡,实现负载自适应平衡,提升搬运稳定性与机械臂跟踪精度。
三、注意事项
模糊规则库的设计与优化
规则完备性:需覆盖所有可能的环境状态组合(如“前方近、左侧远、右侧近”),避免规则缺失导致机器人失控。极端场景(狭窄通道、多障碍物交叉)需针对性设计规则。
规则冲突与调整:初始规则基于经验试凑,可能存在冲突或不优化,需通过大量实地测试观察避障轨迹,反复调整隶属度函数形状与规则内容,消除震荡或死锁现象。例如,调整“近”“中”“远”的隶属度范围,优化转向决策的平滑性。
维数灾难控制:输入变量增加会导致规则数量指数级增长,需精简输入变量,采用分层模糊控制或查表法固化规则,避免Arduino存储与算力不足。
传感器融合与数据质量保障
传感器选型与布局:单一传感器存在盲区和精度限制,需融合超声波、红外、激光雷达等多类型传感器,构建完整环境感知网络;传感器布局需覆盖前方、侧方,形成180°以上视场角,避免探测盲区。
数据滤波与预处理:尽管模糊逻辑对噪声有一定容忍度,但剧烈跳变仍会影响控制质量。输入前需对传感器数据进行滑动平均、中值滤波或加权平均融合,提高数据稳定性。
输入量归一化:不同传感器数据单位和量纲不同,需归一化至统一论域,确保模糊推理的一致性。
系统实时性与算力匹配
硬件选型:复杂模糊推理和多任务调度对算力要求较高,8位Arduino Uno可能无法满足实时性需求(控制周期<50ms),建议选用32位开发板,确保推理速度与控制周期匹配。
非阻塞编程:采用状态机、FreeRTOS等非阻塞编程模式,将传感器采集、模糊推理、电机控制分配到不同线程,避免耗时操作阻塞关键任务,提升系统响应速度。
算法轻量化:通过查表法替代在线解模糊、简化规则数量(如9-15条核心规则)、采用整数运算,降低计算延迟,适配嵌入式平台算力限制。
安全机制与失效保护
硬件防护:设计硬件急停按钮、碰撞开关,直接切断电机电源,作为软件失效的最后一道防线;安装机械限位开关,防止关节超程损坏。
软件保护:启用Arduino硬件看门狗定时器,防止程序死循环;植入传感器自检功能,关键传感器失效时自动切换至安全模式(如减速停止);模糊输出需严格限幅,防止积分饱和与参数漂移。
突变工况应对:负载瞬间突变(如碰撞)时,冻结自适应算法,切换至预设保守参数,避免瞬态过程中引入不稳定。
电源与电磁兼容性设计
电源隔离:BLDC电机启停产生电流波动,易干扰传感器与控制器供电,建议电机与控制器采用独立电源,共地连接,并在电源入口增加大电容(1000μF)与小电容(0.1μF)滤波,稳定电压。
电磁干扰防护:电机动力线与信号线分开布线,必要时增加磁环,减少电磁干扰对传感器数据的影响,确保传感器精度与系统稳定性。
电流采样精度:负载观测依赖精确电流反馈,需使用高精度低阻采样电阻(如0.01Ω)配合高速运放,避免采样噪声导致扭矩控制振荡。
参数标定与调试优化
量化因子标定:模糊控制器依赖输入缩放,需实测典型工况的最大偏差与变化率,取80%分位作为基准,避免标定过小导致规则不敏感,或过大导致输出剧烈跳变。
输出平滑处理:对模糊输出采用滑动平均或低通滤波,进一步消除控制量波动,避免BLDC电机因目标值阶跃产生抖动,提升执行平滑性。
调试可视化:利用串口绘图工具实时监测传感器数据、模糊输出、电机状态,通过波形分析优化规则与参数,缩短调试周期。
1、速度控制 - 模糊PID+一阶低通滤波
#include <FuzzyControl.h>
// 模糊控制输入:速度误差(e)和误差变化率(ec)
FuzzyController fuzzy;
float last_pwm = 128; // 初始PWM
void setup() {
Serial.begin(9600);
fuzzy.setup(7, 7, 7); // 7个模糊集
fuzzy.addRule("e:NB, ec:NB -> pwm:N");
fuzzy.addRule("e:NB, ec:NM -> pwm:N");
// ... 添加完整规则表
}
void loop() {
float e = target_speed - current_speed;
float ec = e - last_e;
float output = fuzzy.compute(e, ec);
// 一阶低通滤波
float alpha = 0.3;
last_pwm = alpha * output + (1 - alpha) * last_pwm;
analogWrite(MOTOR_PIN, last_pwm);
last_e = e;
}
2、位置控制 - 模糊控制+移动平均滤波
#define FILTER_SIZE 5
float pos_buffer[FILTER_SIZE];
int buf_index = 0;
void loop() {
float e = target_pos - current_pos;
float ec = e - last_e;
float raw_output = fuzzy_compute(e, ec);
// 移动平均滤波
pos_buffer[buf_index] = raw_output;
buf_index = (buf_index + 1) % FILTER_SIZE;
float filtered = 0;
for(int i=0; i<FILTER_SIZE; i++) filtered += pos_buffer[i];
filtered /= FILTER_SIZE;
set_motor_position(filtered);
}
3、力控制 - 模糊控制+卡尔曼滤波
// 简化卡尔曼滤波器
float kalman_estimate(float measurement) {
static float x = 0, P = 1, Q = 0.01, R = 0.1;
float K = P / (P + R);
x = x + K * (measurement - x);
P = (1 - K) * P + Q;
return x;
}
void loop() {
float force_error = target_force - measured_force;
float output = fuzzy_compute(force_error, force_error - last_force);
float filtered_output = kalman_estimate(output);
set_motor_current(filtered_output);
last_force = force_error;
}
要点解读
模糊规则需匹配系统特性:BLDC电机存在死区、非线性,模糊规则需通过实验调整,避免规则过于激进导致振荡。
滤波方法影响动态性能:一阶低通滤波响应快但可能超调;移动平均滤除高频噪声但延迟较大;卡尔曼滤波适合动态系统但计算量增加。
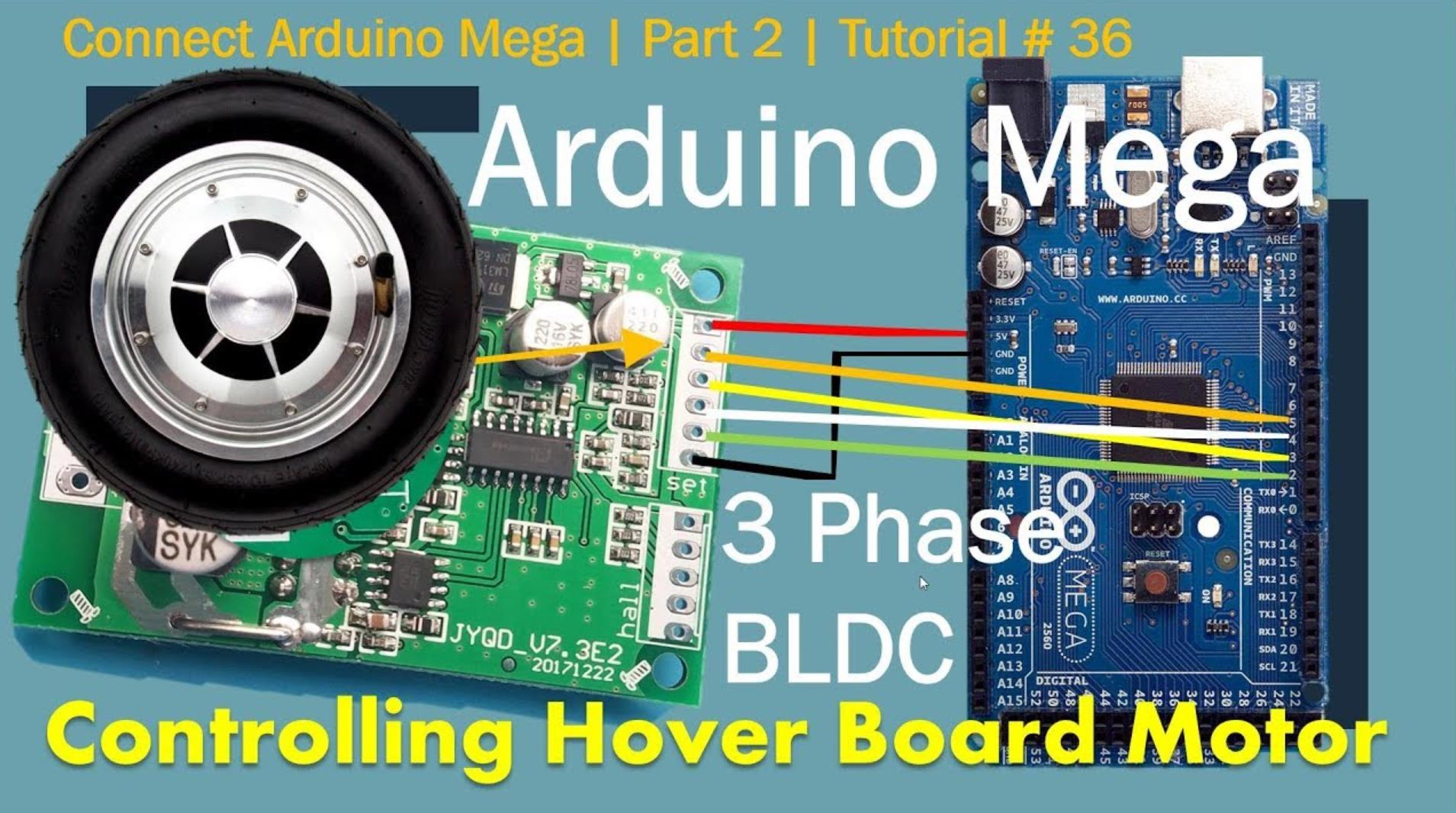
BLDC需结合换相逻辑:代码中需实现霍尔传感器或无感检测的换相控制,模糊输出应作用于PWM占空比而非直接电压。
实时性约束:Arduino计算资源有限,模糊推理和滤波需控制在1ms内完成,避免打断PWM更新周期。
调试需分步验证:先单独测试模糊控制器输出范围,再接入滤波器,最后联调电机响应,避免多因素耦合导致调试困难。

4、基于低通滤波的模糊避障与转向平滑
此案例展示了在模糊逻辑输出转向修正量后,加入一阶低通滤波器(Low Pass Filter)。这能有效消除传感器噪声导致的电机高频抖动,使 BLDC 电机的速度变化更加线性、平滑。
// 滤波参数定义
float alpha = 0.3; // 滤波系数 (0-1), 越大越平滑,但响应越慢
int filteredBias = 0; // 滤波后的偏差值
int lastBias = 0; // 上一次的偏差值
void loop() {
// 1. 获取传感器数据并计算原始模糊偏差 (rawBias)
int rawBias = calculateFuzzyBias(); // 假设此函数返回模糊推理结果
// 2. 核心:一阶低通输出平滑滤波
// 公式: filtered = alpha * new + (1 - alpha) * old
filteredBias = alpha * rawBias + (1 - alpha) * lastBias;
lastBias = filteredBias;
// 3. 死区与防抖动处理:只有当偏差变化足够大时才更新电机
if (abs(filteredBias - lastBias) > 5) {
int baseSpeed = 180;
int leftSpeed = baseSpeed + filteredBias;
int rightSpeed = baseSpeed - filteredBias;
// 限制PWM输出范围
leftSpeed = constrain(leftSpeed, 0, 255);
rightSpeed = constrain(rightSpeed, 0, 255);
analogWrite(pwmLeft, leftSpeed);
analogWrite(pwmRight, rightSpeed);
}
delay(20);
}
5、带“安全本能”与死区处理的混合模糊控制
BLDC 电机在低速时存在启动死区,且模糊逻辑在极端危险情况下可能存在推理延迟。此案例采用混合控制架构:底层保留硬性安全阈值(本能),上层运行带滤波的模糊逻辑(大脑),并处理了 BLDC 的低速死区。
const int SAFETY_DIST = 15; // 硬性安全距离 (cm)
void loop() {
float dF = getFrontDistance();
// --- 1. 安全本能层 (优先级最高) ---
if (dF < SAFETY_DIST) {
// 紧急刹车:直接拉低PWM,切断电机动力
analogWrite(motorLeftPWM, 0);
analogWrite(motorRightPWM, 0);
return; // 跳过模糊逻辑
}
// --- 2. 模糊逻辑层 (正常运行) ---
float turnOutput = fuzzyInference(); // 模糊推理得出转向量
// 平滑驱动 BLDC
int baseSpeed = 180;
int leftS = baseSpeed - turnOutput;
int rightS = baseSpeed + turnOutput;
// 死区处理:BLDC有最低启动电压,速度太低会啸叫或不转,需设为0
if (leftS < 50) leftS = 0;
if (rightS < 50) rightS = 0;
analogWrite(motorLeftPWM, leftS);
analogWrite(motorRightPWM, rightS);
delay(10);
}
6、融合状态机与自适应模糊规则的沿墙巡检
在复杂的货架巡检场景中,机器人不仅需要平滑沿墙,还需要处理转弯和避障。此案例利用状态机管理任务,并将模糊逻辑计算出的“纠偏力度”作为 PID 的设定值,实现更精准的闭环控制。
enum RobotState { WALL_FOLLOWING, TURNING_NEXT_SHELF, OBSTACLE_AVOIDANCE };
RobotState currentState = WALL_FOLLOWING;
void loop() {
float frontDist = getFrontDistance();
switch (currentState) {
case WALL_FOLLOWING:
// 1. 模糊逻辑计算理想的“目标纠偏量”
int sensorError = getWeightedSensorError();
float fuzzySetpoint = fuzzyInference(sensorError);
// 2. 将模糊输出作为PID的目标,执行平滑跟踪
turnPID.Setpoint = fuzzySetpoint;
turnPID.Compute();
// 3. 融合输出到 BLDC 电机
float forwardSpeed = 2.0;
motorL.move(forwardSpeed + turnPID.Output);
motorR.move(forwardSpeed - turnPID.Output);
// 状态切换判断
if (frontDist > 0 && frontDist < 30) currentState = OBSTACLE_AVOIDANCE;
break;
case OBSTACLE_AVOIDANCE:
motorL.move(0); motorR.move(0); // 紧急停车
if (frontDist > 40) currentState = WALL_FOLLOWING; // 障碍移开恢复
break;
}
delay(30);
}
要点解读
输出平滑滤波消除高频抖动:模糊逻辑虽然能实现平滑的“拟人化”转向,但传感器本身的噪声会导致输出频繁跳变。在模糊输出后加入一阶低通滤波器(如 filtered = alpha * new + (1-alpha) * old),可以极大地减少机械磨损和能耗,使 BLDC 电机的速度变化更加线性。
BLDC 低速死区(Dead Zone)处理:BLDC 电机通常需要一定的初始电压(如占空比 > 10%)才能克服静摩擦力开始转动。如果模糊逻辑输出的修正量过小,电机可能不转或产生高频啸叫。必须在代码中设置死区阈值,低于该值时直接将 PWM 设为 0。
“安全本能”与模糊大脑的混合架构:模糊逻辑推理过程可能存在微小延迟,在极端危险情况下(如突然贴近墙壁)输出不够果断。采用混合控制,底层保留硬性的安全阈值(如距离 < 15cm 直接切断动力),上层运行模糊逻辑,能兼顾控制的平滑性与绝对安全性。
模糊逻辑与 PID 的融合控制:为了应对复杂多变的环境(如不同宽度的通道),可以将模糊逻辑计算出的“纠偏力度”作为 PID 控制器的设定值(Setpoint)或前馈量。模糊逻辑负责高层的自适应决策,PID 负责底层的精准执行,从而实现更平稳的闭环控制。
状态机保障复杂场景的任务连续性:机器人的实际工作不仅仅是“平滑移动”,还包含转弯、避障、恢复等多种行为。利用状态机(State Machine)来管理这些状态切换,可以确保在遇到突发障碍物时能够安全暂停,并在条件允许时平滑恢复到模糊沿墙模式,保障任务的连续性。
请注意:以上案例仅作为思路拓展的参考示例,不保证完全正确、适配所有场景或可直接编译运行。由于硬件平台、实际使用场景、Arduino 版本的差异,均可能影响代码的适配性与使用方法的选择。在实际编程开发时,请务必根据自身硬件配置、使用场景及具体功能需求进行针对性调整,并通过多次实测验证效果;同时需确保硬件接线正确,充分了解所用传感器、执行器等设备的技术规范与核心特性。对于涉及硬件操作的代码,使用前务必核对引脚定义、电平参数等关键信息的准确性与安全性,避免因参数错误导致硬件损坏或运行异常。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 2
2 0
0- 0



 已为社区贡献148条内容
已为社区贡献148条内容

所有评论(0)