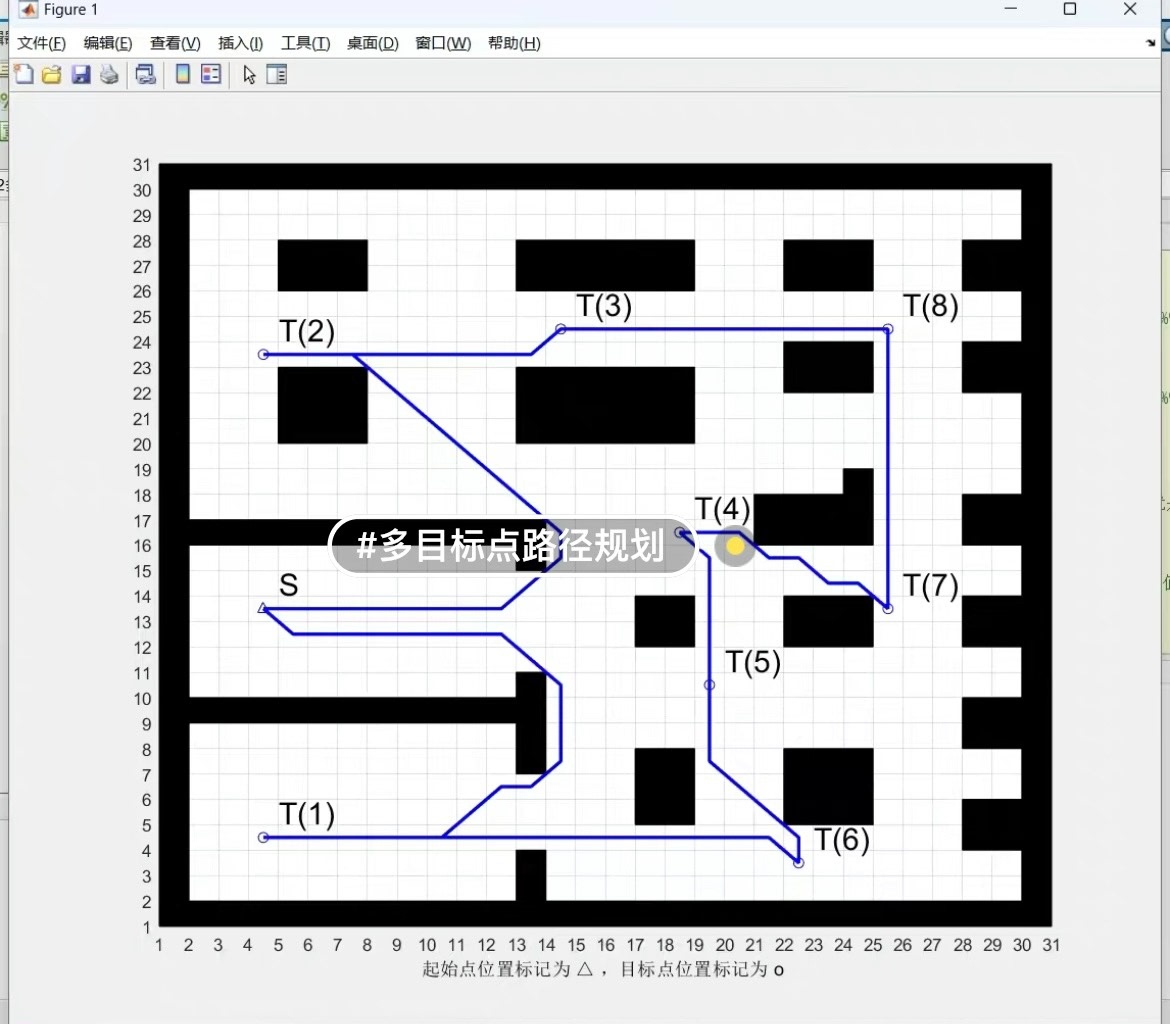
多目标点路径规划——蚁群 + A* 算法解决室内旅行商问题
最后,我们将蚁群算法得到的目标点最优顺序与 A* 算法规划的两两之间路径进行组合,得到最终的路线。final_route.append(points[0]) # 回到起点从起点开始,依次根据最优顺序,利用 A* 算法规划相邻目标点之间的路径,并将路径上的点加入最终路线,最后回到起点。通过以上三个步骤,我们成功地用蚁群 + A* 算法解决了室内旅行商问题,为送餐移动机器人规划出了最优的路径😎。希望
多目标点路径规划——蚁群+A*算法 室内旅行商问题——送餐移动机器人(从厨房出发到达多个目标点,最后返回厨房) 1,A*算法规划两两之间的路径,并计算路径长度; 2,蚁群算法依据两点之间路径长度,规划多个目标点的先后到达顺序; 3,组合最优顺序的路径,输出最后路线
最近一直在研究室内旅行商问题,也就是送餐移动机器人从厨房出发到达多个目标点,最后返回厨房的路径规划。今天就来和大家分享一下我用蚁群 + A* 算法解决这个问题的过程😃
A* 算法规划两两之间的路径,并计算路径长度
A* 算法是一种常用的启发式搜索算法,在路径规划中表现出色。它通过一个评估函数来选择下一个扩展的节点,这个评估函数结合了从起点到当前节点的实际代价 g(n) 和从当前节点到目标节点的估计代价 h(n),即 f(n) = g(n) + h(n)。
下面是一段简化的 Python 代码来实现 A* 算法规划两点之间的路径:
import heapq
def astar(graph, start, end):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in graph}
g_score[start] = 0
f_score = {node: float('inf') for node in graph}
f_score[start] = heuristic(start, end)
while open_set:
_, current = heapq.heappop(open_set)
if current == end:
path = reconstruct_path(came_from, current)
length = calculate_path_length(path)
return path, length
for neighbor in graph[current].keys():
tentative_g_score = g_score[current] + graph[current][neighbor]
if tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + heuristic(neighbor, end)
if neighbor not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor], neighbor))
def heuristic(a, b):
# 这里简单用曼哈顿距离作为启发函数
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def reconstruct_path(came_from, current):
total_path = [current]
while current in came_from:
current = came_from[current]
total_path.insert(0, current)
return total_path
def calculate_path_length(path):
length = 0
for i in range(len(path) - 1):
length += graph[path[i]][path[i + 1]]
return length代码分析:
- 首先定义了一些初始的数据结构,如
openset用于存储待扩展的节点,camefrom记录每个节点的前驱节点,gscore记录从起点到每个节点的实际代价,fscore记录评估函数的值。 - 在
while循环中,每次从openset中取出fscore最小的节点进行扩展。 - 对于每个扩展的节点,检查其邻居节点,计算从起点经过当前节点到邻居节点的
tentativegscore,如果小于邻居节点当前的gscore,则更新camefrom、gscore和fscore,并将邻居节点加入open_set。 - 当扩展到目标节点时,通过
reconstruct_path函数重建路径,并计算路径长度。
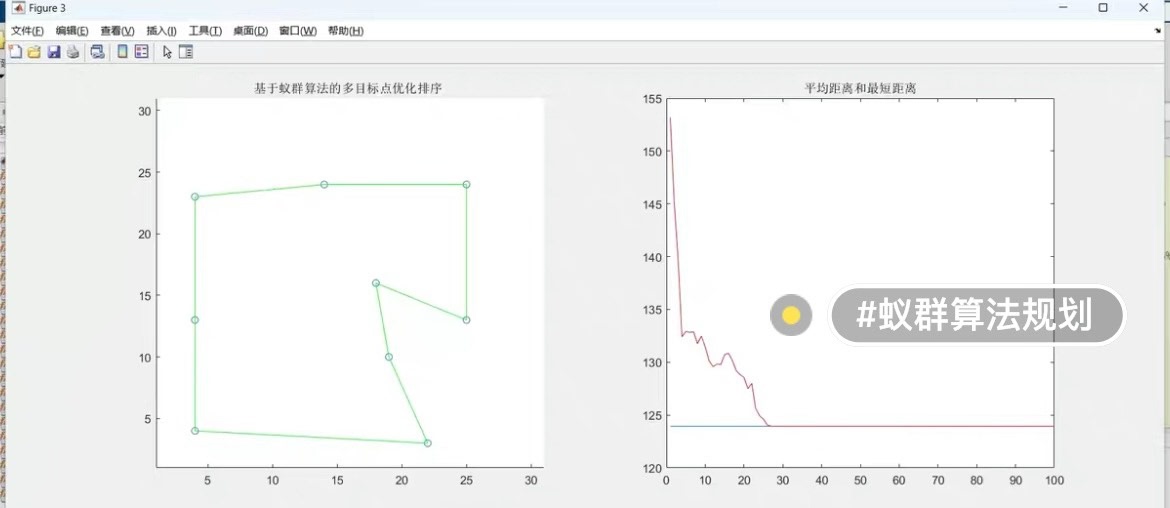
蚁群算法依据两点之间路径长度,规划多个目标点的先后到达顺序
蚁群算法是一种基于群体智能的优化算法,它模拟蚂蚁觅食的行为来寻找最优路径。在我们的问题中,蚂蚁会根据两点之间路径长度来选择下一个目标点。
import random
def ant_colony(points, num_ants, num_iterations, alpha, beta, rho):
num_points = len(points)
distances = [[astar(graph, points[i], points[j])[1] for j in range(num_points)] for i in range(num_points)]
pheromone = [[1.0 for _ in range(num_points)] for _ in range(num_points)]
best_order = None
best_distance = float('inf')
for _ in range(num_iterations):
for _ in range(num_ants):
order = [0]
unvisited = set(range(1, num_points))
current = 0
while unvisited:
next_point = select_next_point(pheromone[current], distances[current], unvisited, alpha, beta)
order.append(next_point)
unvisited.remove(next_point)
current = next_point
order.append(0) # 回到起点
distance = calculate_total_distance(order, distances)
if distance < best_distance:
best_distance = distance
best_order = order[:]
update_pheromone(pheromone, order, distance, rho)
return best_order, best_distance
def select_next_point(pheromone, distances, unvisited, alpha, beta):
numerators = [pheromone[i] ** alpha * (1.0 / distances[i]) ** beta for i in unvisited]
denominator = sum(numerators)
probabilities = [num / denominator for num in numerators]
return random.choices(list(unvisited), weights=probabilities)[0]
def calculate_total_distance(order, distances):
total_distance = 0
for i in range(len(order) - 1):
total_distance += distances[order[i]][order[i + 1]]
return total_distance
def update_pheromone(pheromone, order, distance, rho):
for i in range(len(order) - 1):
pheromone[order[i]][order[i + 1]] = (1 - rho) * pheromone[order[i]][order[i + 1]] + 1.0 / distance
pheromone[order[i + 1]][order[i]] = pheromone[order[i]][order[i + 1]]代码分析:
- 首先计算所有点之间的距离矩阵
distances和初始的信息素矩阵pheromone。 - 在每次迭代中,每只蚂蚁从起点出发,根据信息素和距离选择下一个目标点,直到遍历完所有目标点后回到起点。
- 计算每只蚂蚁走过的路径总长度,更新最优路径和最优距离。
- 根据蚂蚁走过的路径长度更新信息素矩阵,信息素会随着时间逐渐挥发(通过
rho参数控制),同时在走过的路径上增加信息素。
组合最优顺序的路径,输出最后路线
最后,我们将蚁群算法得到的目标点最优顺序与 A* 算法规划的两两之间路径进行组合,得到最终的路线。
def combine_paths(best_order, points):
final_route = [points[0]]
for i in range(len(best_order) - 1):
start = points[best_order[i]]
end = points[best_order[i + 1]]
path, _ = astar(graph, start, end)
final_route.extend(path[1:])
final_route.append(points[0]) # 回到起点
return final_route代码分析:
- 从起点开始,依次根据最优顺序,利用 A* 算法规划相邻目标点之间的路径,并将路径上的点加入最终路线,最后回到起点。
通过以上三个步骤,我们成功地用蚁群 + A* 算法解决了室内旅行商问题,为送餐移动机器人规划出了最优的路径😎。希望这篇分享对大家理解和实现类似的路径规划问题有所帮助!
这里假设 graph 是一个表示地图的邻接矩阵,存储了各个点之间的连接关系和距离信息。实际应用中需要根据具体的地图数据来构建这个 graph。
多目标点路径规划——蚁群+A*算法 室内旅行商问题——送餐移动机器人(从厨房出发到达多个目标点,最后返回厨房) 1,A*算法规划两两之间的路径,并计算路径长度; 2,蚁群算法依据两点之间路径长度,规划多个目标点的先后到达顺序; 3,组合最优顺序的路径,输出最后路线
以上代码只是一个简单的示例,实际应用中可能需要根据具体需求进行更多的优化和调整。比如,对于大规模的地图数据,可能需要考虑空间复杂度和时间复杂度的优化;对于启发函数的选择,也可以根据实际情况进行调整以提高算法的效率。
总之,多目标点路径规划是一个很有趣也很有挑战性的问题,通过蚁群算法和 A* 算法的结合,我们能够找到相对较优的解决方案。大家如果有什么想法或者问题,欢迎一起讨论呀😄
以上就是整个多目标点路径规划的实现过程啦,希望能给大家一些启发~
#路径规划 #蚁群算法 #A*算法 #室内旅行商问题

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)