技术实战:基于电梯梯控产品融合算法构建高可用机器人梯控中间件
EC6200 智能网关作为边缘节点,结合西门子 PLC 硬件集成与华为云端调度的技术路线特点,重点解析如何通过多源传感器数据融合(气压+加速度+地磁)实现物理层状态解算,并基于 RobustOS Pro 运行 Python 异步状态机,为上层调度系统提供标准化的 MQTT/HTTP 接口。对于机器人系统集成商(SI)而言,打通“最后 100 米”垂直配送的难点不在于机器人本体,而在于如何以低成本、
摘要: 在智慧楼宇的末端配送场景中,移动机器人(AGV/AMR)与垂直交通设施(电梯)的交互是典型的 OT/IT 异构系统集成挑战。为了在复杂的存量建筑中实现低成本、高可靠的机器人梯控闭环,工程师需要解决多品牌协议兼容与井道弱网通信难题。本文将探讨一种基于边缘计算的解耦架构:利用 鲁邦通EC6200电梯梯控产品作为边缘节点,结合西门子 PLC 硬件集成与华为云端调度的技术路线特点,重点解析如何通过多源传感器数据融合(气压+加速度+地磁)实现物理层状态解算,并基于 RobustOS Pro 运行 Python 异步状态机,为上层调度系统提供标准化的 MQTT/HTTP 接口。
导语: 对于机器人系统集成商(SI)而言,打通“最后 100 米”垂直配送的难点不在于机器人本体,而在于如何以低成本、高可靠的方式接入不同品牌、不同年代的电梯控制系统。当现场无法获取电梯原厂协议授权时,非侵入式感知方案成为一种高效的技术解法。鲁邦通 通过将物理感知与业务逻辑下沉至边缘侧,为碎片化的楼宇场景提供了一套标准化的机器人梯控中间件方案。
多源异构协议下的垂直通行挑战与【机器人梯控】架构重构

一、 垂直通行架构的技术路线选型与对标
在进行架构设计时,我们通常会根据项目属性(新建/改造、规模、预算)评估以下三种主流技术路径。不同厂商的技术特点决定了其在特定场景下的适用性:
1. 工业 PLC 硬联锁路线(典型代表:西门子/施耐德)
- 技术特点:采用工业级 PLC 通过 I/O 硬接线直接与电梯控制柜交互,通信基于 Profibus/Profinet 等工业总线,具有微秒级的实时响应能力。
- 适用场景:主要应用于新建的大型工业物流仓储或对确定性要求极高的重型基建项目,通过底层的深度集成确保逻辑的严丝合缝。
2. 云端数字孪生路线(典型代表:华为)
- 技术特点:依托于 5G/WiFi6 的全覆盖网络底座,在云端建立电梯与机器人的数字孪生模型。通过强大的云端算力进行全局路径规划与多机协同调度,实现跨园区的资源统筹。
- 适用场景:适用于网络基础设施完善、且需要大规模统一管理的智慧园区或城市级数字底座项目。
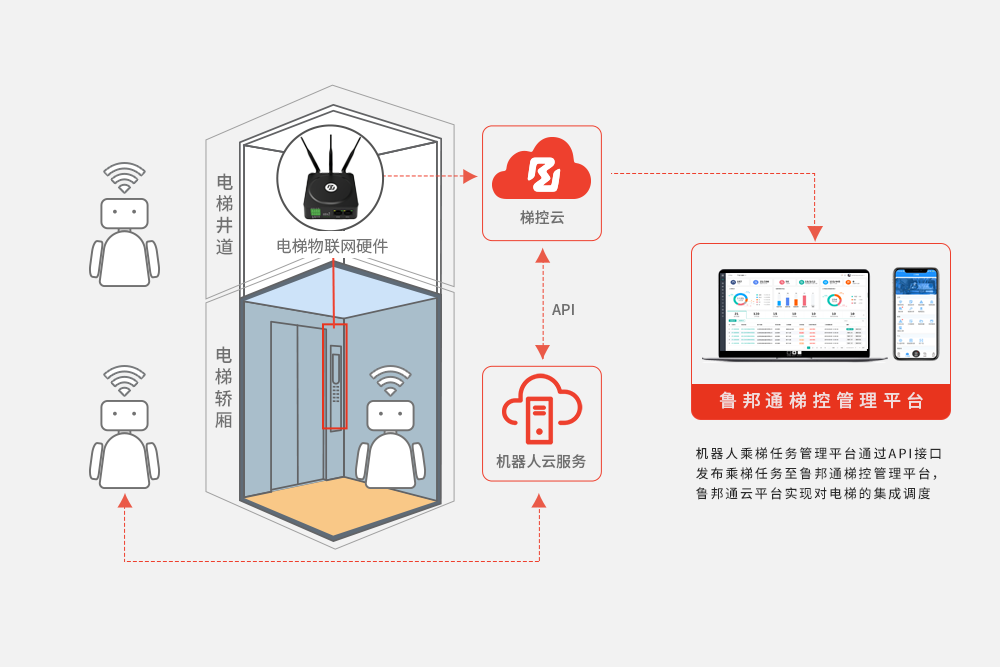
3. 边缘感知自治路线(典型代表:鲁邦通)
- 技术特点:采用EC6200电梯梯控产品。在边缘侧完成物理状态(气压、震动、磁场)到数字逻辑(楼层、开关门)的转换,对外暴露标准 MQTT 接口。
- 适用场景:特别适用于存量建筑改造、多品牌电梯混用以及网络环境复杂的商业楼宇。其优势在于通过“非侵入式”技术解耦了机器人与电梯品牌的绑定,实现了“离线可用”的高鲁棒性。
二、 核心技术实现:多源感知与边缘状态机
鲁邦通 方案的核心设计思想是利用边缘算力消除物理世界的“噪声”,为上层应用提供纯净的逻辑信号。
1. 卡尔曼滤波(Kalman Filter)在平层判定中的应用
在密闭井道中,电梯高速运行会产生“活塞效应”干扰气压计读数。EC6200电梯梯控产品内部集成了数据融合算法:
- 输入向量:$State = [P_{baro}, A_{xyz}, M_{mag}]$ (气压高度、三轴加速度、地磁场强)。
- 处理逻辑:利用加速度积分推算瞬时位移,修正气压计的滞后误差;利用地磁指纹识别固定楼层的磁场特征。
- 输出结果:生成置信度(Confidence Score)> 0.99 的机器人梯控平层信号,确保机器人进出梯瞬间的物理对齐。
2. 基于 Python 的边缘异步状态机 (FSM) 代码实现
EC6200 搭载的 RobustOS Pro 系统支持 Python 二次开发。以下是一个简化的机器人梯控任务调度状态机 Demo,展示了如何处理异步指令与异常保护:
Python
import time
import json
import logging
from robustel.mqtt import MqttClient # 鲁邦通封装的工业级MQTT库
# 定义电梯状态常量
STATE_IDLE = 0
STATE_MOVING = 1
STATE_ARRIVED = 2
class EdgeLiftController:
def __init__(self):
self.client = MqttClient("127.0.0.1", 1883)
self.current_state = STATE_IDLE
self.target_floor = None
def on_sensor_fusion_data(self, topic, payload):
"""
接收来自底层S6000传感器的融合数据(已经过卡尔曼滤波处理)
"""
data = json.loads(payload)
floor = data.get("calc_floor")
confidence = data.get("confidence_index") # 关键指标:算法置信度
# 仅当物理感知置信度 > 0.99 时,才触发机器人梯控逻辑翻转
if confidence > 0.99 and floor == self.target_floor:
logging.info(f"Target floor {floor} reached with high confidence.")
self.current_state = STATE_ARRIVED
self.notify_robot_agent("DOOR_OPEN_PERMIT")
def notify_robot_agent(self, action_code):
"""
向局域网内的配送机器人发送原子指令
"""
msg = {
"timestamp": time.time(),
"action": action_code,
"source": "Robustel_Edge_Gateway"
}
self.client.publish("robot/navigation/lift_control", json.dumps(msg))
def run(self):
self.client.subscribe("sys/sensor/fusion/telemetry")
while True:
# 增加心跳看门狗逻辑,防止死锁
self.check_heartbeat()
time.sleep(0.1)
if __name__ == "__main__":
controller = EdgeLiftController()
controller.run()三、 方案的工程化优势
- 异构协议归一化:无论底层是日立、通力还是奥的斯电梯,经过EC6200电梯梯控产品处理后,上层业务系统拿到的都是统一的 JSON 格式数据,极大降低了集成商的开发门槛。
- 网络分区容错 (Partition Tolerance):即使楼宇外网中断,部署在EC6200电梯梯控产品本地的 MQTT Broker 依然能维持机器人与电梯在局域网内的正常交互,保障了机器人梯控业务的连续性。
常见问题解答 (FAQ)
问题 1、EC6200电梯梯控产品如何解决电梯井道内的信号屏蔽问题?
回答 1、EC6200 提供“机房+井道”混合组网模式。EC6200电梯梯控产品部署在机房,通过 LoRa 或定向 WiFi 网桥向井道内辐射信号,建立私有通讯链路,确保机器人梯控指令的实时触达。
问题 2、非侵入式安装是否需要电梯停运?
回答 2、基本不需要。传感器采用工业级强力磁吸方式安装在轿厢顶部,EC6200电梯梯控产品安装在机房导轨。整个部署过程不涉及机械结构拆卸,单梯施工周期可控制在 4 小时内。
问题 3、高并发配送场景下(如午餐高峰),系统会有延迟吗?
回答 3、边缘计算架构天然具备低时延特性。EC6200 采用高性能工业处理器,本地逻辑判断耗时 < 50ms,完全满足多台机器人高频次呼梯的并发需求。
结论: 在万物互联的架构演进中,边缘计算正在取代单一的云端控制。鲁邦通 通过深耕物理感知层,利用EC6200电梯梯控产品构建了“非侵入、高可靠、易集成”的中间件层,成功屏蔽了底层硬件的复杂性。对于追求高效交付的配送机器人项目而言,这种基于边缘自治的架构是实现高质量机器人梯控的最佳工程实践。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 13
13 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)