空间智能AI模型的推理加速优化实践
空间智能(Spatial Intelligence)是人工智能领域的重要分支,专注于理解和处理三维空间中的视觉信息。从自动驾驶的环境感知到机器人的三维重建,从AR/VR的空间理解到遥感图像分析,空间智能模型正在各个领域发挥关键作用。CANN开源社区的cann-recipes-spatial-intelligence仓库为空间智能业务中的典型模型提供了基于CANN平台的完整优化方案。
空间智能AI模型的推理加速优化实践
引言
空间智能(Spatial Intelligence)是人工智能领域的重要分支,专注于理解和处理三维空间中的视觉信息。从自动驾驶的环境感知到机器人的三维重建,从AR/VR的空间理解到遥感图像分析,空间智能模型正在各个领域发挥关键作用。CANN开源社区的cann-recipes-spatial-intelligence仓库为空间智能业务中的典型模型提供了基于CANN平台的完整优化方案。
空间智能概述
什么是空间智能
空间智能是指人工智能系统对三维空间环境进行感知、理解和交互的能力。与传统2D视觉不同,空间智能强调:
- 三维感知:理解3D空间中的物体关系和几何结构
- 深度估计:从2D图像推断3D深度信息
- 场景理解:识别场景布局和语义
- 空间推理:基于3D信息进行决策和规划
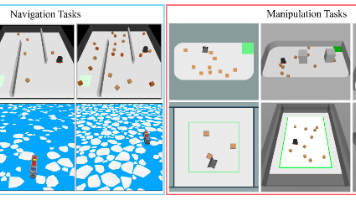
典型应用场景
- 自动驾驶:环境感知、障碍物检测、路径规划
- 机器人导航:SLAM、三维重建、避障
- AR/VR:空间映射、姿态估计、手势识别
- 遥感分析:地形识别、目标检测、变化检测
- 工业检测:3D测量、缺陷识别、质量评估
典型空间智能模型
深度估计模型
"""
深度估计模型示例:MiDaS
"""
import torch
import torch.nn as nn
class MiDaSDepthEstimation(nn.Module):
"""MiDaS深度估计模型"""
def __init__(self):
super().__init__()
# 使用EfficientNet或ViT作为backbone
self.backbone = EfficientNetBackbone()
# 深度预测头
self.depth_head = nn.Sequential(
nn.Conv2d(1280, 512, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(512, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1, kernel_size=1)
)
def forward(self, x):
# 特征提取
features = self.backbone(x)
# 深度预测
depth = self.depth_head(features)
return depth
三维重建模型
"""
三维重建模型示例:NeRF变体
"""
import torch
import torch.nn as nn
class NeRFModel(nn.Module):
"""NeRF(神经辐射场)模型"""
def __init__(self, hidden_dim=256):
super().__init__()
# 位置编码
self.pos_encoder = PositionalEncoding()
# MLP网络
self.mlp = nn.Sequential(
nn.Linear(60, hidden_dim), # 位置编码后60维
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 4) # RGB + density
)
def forward(self, rays_o, rays_d):
# 位置编码
encoded = self.pos_encoder(rays_o, rays_d)
# MLP预测
output = self.mlp(encoded)
# 解析RGB和密度
rgb = torch.sigmoid(output[:, :3])
density = torch.relu(output[:, 3:4])
return rgb, density
点云处理模型
"""
点云处理模型示例:PointNet++
"""
import torch
import torch.nn as nn
class PointNetPlusPlus(nn.Module):
"""PointNet++点云处理模型"""
def __init__(self, num_classes=40):
super().__init__()
# Set Abstraction模块
self.sa1 = SetAbstraction(npoint=512, radius=0.2, nsample=32, in_channel=3, mlp=[64, 64, 128])
self.sa2 = SetAbstraction(npoint=128, radius=0.4, nsample=64, in_channel=128 + 3, mlp=[128, 128, 256])
self.sa3 = SetAbstraction(npoint=None, radius=None, nsample=None, in_channel=256 + 3, mlp=[256, 256, 512])
# FP模块
self.fp3 = FeaturePropagation(256, [512, 256])
self.fp2 = FeaturePropagation(128, [256, 128])
self.fp1 = FeaturePropagation(128, [128, 128, 128])
# 分类头
self.conv1 = nn.Conv1d(128, 128, 1)
self.bn1 = nn.BatchNorm1d(128)
self.drop1 = nn.Dropout(0.5)
self.conv2 = nn.Conv1d(128, num_classes, 1)
def forward(self, xyz, points):
# Set Abstraction
l1_xyz, l1_points = self.sa1(xyz, points)
l2_xyz, l2_points = self.sa2(l1_xyz, l1_points)
l3_xyz, l3_points = self.sa3(l2_xyz, l2_points)
# Feature Propagation
l2_points = self.fp3(l2_xyz, l3_xyz, l2_points, l3_points)
l1_points = self.fp2(l1_xyz, l2_xyz, l1_points, l2_points)
l0_points = self.fp1(xyz, l1_xyz, points, l1_points)
# 分类
feat = self.drop1(F.relu(self.bn1(self.conv1(l0_points))))
feat = self.conv2(feat)
feat = feat.max(-1)[0]
return feat
CANN优化方案
优化架构
cann-recipes-spatial-intelligence仓库提供了完整的优化方案:
空间智能模型
↓
模型转换层
(ONNX → TorchScript → OM)
↓
算子优化层
(融合算子、自定义算子)
↓
图优化层
(常量折叠、死代码消除)
↓
运行时优化层
(内存复用、流水线并行)
↓
昇腾硬件
算子优化实现
深度可分离卷积优化
"""
优化深度可分离卷积算子
"""
import torch
import torch_npu
class OptimizedDepthwiseSeparableConv(torch.nn.Module):
"""优化的深度可分离卷积"""
def __init__(self, in_channels, out_channels, kernel_size=3):
super().__init__()
# 深度卷积
self.depthwise = torch.nn.Conv2d(
in_channels, in_channels, kernel_size,
groups=in_channels, padding=kernel_size // 2
)
self.bn1 = torch.nn.BatchNorm2d(in_channels)
# 逐点卷积
self.pointwise = torch.nn.Conv2d(
in_channels, out_channels, 1
)
self.bn2 = torch.nn.BatchNorm2d(out_channels)
def forward(self, x):
# 使用NPU融合算子
x = torch_npu.npu_fused_depthwise_conv_bn_relu(
x,
self.depthwise.weight,
self.bn1.weight,
self.bn1.bias,
self.bn1.running_mean,
self.bn1.running_var,
1, # stride
[self.depthwise.padding[0], self.depthwise.padding[0]], # padding
1, # dilation
1, # groups
)
x = torch_npu.npu_fused_conv_bn_relu(
x,
self.pointwise.weight,
self.bn2.weight,
self.bn2.bias,
self.bn2.running_mean,
self.bn2.running_var
)
return x
3D注意力机制优化
"""
优化3D空间注意力机制
"""
class SpatialAttention3D(torch.nn.Module):
"""3D空间注意力模块"""
def __init__(self, in_channels):
super().__init__()
# 空间注意力分支
self.conv_spatial = torch.nn.Conv3d(
in_channels, 1, kernel_size=1
)
# 通道注意力分支
self.fc_channel = torch.nn.Sequential(
torch.nn.AdaptiveAvgPool3d(1),
torch.nn.Conv3d(in_channels, in_channels // 4, 1),
torch.nn.ReLU(inplace=True),
torch.nn.Conv3d(in_channels // 4, in_channels, 1),
torch.nn.Sigmoid()
)
def forward(self, x):
# 通道注意力
channel_attn = self.fc_channel(x)
x = x * channel_attn
# 空间注意力
spatial_attn = torch.sigmoid(self.conv_spatial(x))
x = x * spatial_attn
return x
点云特征提取优化
"""
优化点云特征提取
"""
class OptimizedPointFeatureExtractor(torch.nn.Module):
"""优化的点云特征提取器"""
def __init__(self, input_channels=3, feature_dim=128):
super().__init__()
# 使用融合的MLP
self.mlp1 = torch.nn.Sequential(
torch.nn.Conv2d(input_channels, 64, 1),
torch.nn.BatchNorm2d(64),
torch.nn.ReLU()
)
self.mlp2 = torch.nn.Sequential(
torch.nn.Conv2d(64, 128, 1),
torch.nn.BatchNorm2d(128),
torch.nn.ReLU()
)
def forward(self, points):
# points: [B, N, C]
batch_size, num_points, _ = points.shape
# 转换为[B, C, N, 1]便于卷积
x = points.transpose(1, 2).unsqueeze(-1)
# 使用NPU优化的卷积
x = torch_npu.npu_fused_conv_bn_relu(
x,
self.mlp1[0].weight,
self.mlp1[1].weight,
self.mlp1[1].bias,
self.mlp1[1].running_mean,
self.mlp1[1].running_var
)
x = torch_npu.npu_fused_conv_bn_relu(
x,
self.mlp2[0].weight,
self.mlp2[1].weight,
self.mlp2[1].bias,
self.mlp2[1].running_mean,
self.mlp2[1].running_var
)
# 最大池化
x = x.max(dim=2)[0].squeeze(-1)
return x
模型部署实践
深度估计模型部署
"""
深度估计模型的端到端部署
"""
import torch
import torch_npu
from PIL import Image
import numpy as np
class DepthEstimationDeployment:
"""深度估计模型部署类"""
def __init__(self, model_path="midas.om"):
# 初始化NPU
torch_npu.npu.set_device("npu:0")
# 加载模型
self.model = self._load_model(model_path)
self.model.eval()
# 初始化预处理器
self.preprocessor = DepthPreprocessor()
# 初始化后处理器
self.postprocessor = DepthPostprocessor()
def _load_model(self, model_path):
"""加载OM模型"""
model = torch.jit.load(model_path)
return model.to("npu:0")
def infer(self, image_path):
"""执行深度估计推理"""
# 1. 图像预处理
image = Image.open(image_path)
image_tensor = self.preprocessor.process(image)
image_tensor = image_tensor.to("npu:0")
# 2. 执行推理
with torch.no_grad():
with torch_npu.npu FORMAT("NHWC"):
with torch.cuda.amp.autocast():
depth_map = self.model(image_tensor)
# 3. 深度图后处理
depth_map = self.postprocessor.process(depth_map)
return depth_map
class DepthPreprocessor:
"""深度估计图像预处理器"""
def __init__(self, target_size=(384, 384)):
self.target_size = target_size
def process(self, image):
# 调整大小
image = image.resize(self.target_size, Image.BILINEAR)
# 转换为tensor
image = np.array(image).astype(np.float32) / 255.0
image = torch.from_numpy(image).permute(2, 0, 1).unsqueeze(0)
return image
class DepthPostprocessor:
"""深度估计结果后处理器"""
def __init__(self, min_depth=0.1, max_depth=10.0):
self.min_depth = min_depth
self.max_depth = max_depth
def process(self, depth_map):
# 转换到CPU
depth_map = depth_map.cpu().numpy().squeeze()
# 归一化到有效范围
depth_map = np.clip(depth_map, self.min_depth, self.max_depth)
# 可选:应用中值滤波减少噪声
# from scipy.ndimage import median_filter
# depth_map = median_filter(depth_map, size=5)
return depth_map
点云分割模型部署
"""
点云语义分割模型部署
"""
class PointCloudSegmentationDeployment:
"""点云语义分割部署类"""
def __init__(self, model_path="pointnetpp.om", num_classes=40):
torch_npu.npu.set_device("npu:0")
self.model = self._load_model(model_path)
self.model.eval()
self.num_classes = num_classes
self.preprocessor = PointCloudPreprocessor(num_points=2048)
def _load_model(self, model_path):
model = torch.jit.load(model_path)
return model.to("npu:0")
def infer(self, points):
"""
points: numpy array [N, 3] 或 [N, 6] (xyz + rgb)
"""
# 预处理
points_tensor = self.preprocessor.process(points)
points_tensor = points_tensor.to("npu:0")
# 推理
with torch.no_grad():
with torch.cuda.amp.autocast():
predictions = self.model(points_tensor)
# 后处理
labels = predictions.argmax(dim=-1).cpu().numpy()
return labels
class PointCloudPreprocessor:
"""点云预处理器"""
def __init__(self, num_points=2048):
self.num_points = num_points
def process(self, points):
"""
points: numpy array [N, C]
返回: torch tensor [1, num_points, C]
"""
points = torch.from_numpy(points).float()
# 采样或填充到固定数量
if points.shape[0] > self.num_points:
# 随机采样
indices = torch.randperm(points.shape[0])[:self.num_points]
points = points[indices]
elif points.shape[0] < self.num_points:
# 重复填充
repeat_times = (self.num_points // points.shape[0]) + 1
points = points.repeat(repeat_times, 1)[:self.num_points]
# 归一化
points[:, :3] = self.normalize_xyz(points[:, :3])
# 添加batch维度
points = points.unsqueeze(0)
return points
@staticmethod
def normalize_xyz(xyz):
"""归一化xyz坐标"""
centroid = xyz.mean(dim=0, keepdim=True)
xyz = xyz - centroid
max_distance = torch.sqrt((xyz ** 2).sum(dim=1)).max()
xyz = xyz / max_distance
return xyz
3D目标检测部署
"""
3D目标检测模型部署(以VoteNet为例)
"""
class Object3DDetectionDeployment:
"""3D目标检测部署类"""
def __init__(self, model_path="votenet.om"):
torch_npu.npu.set_device("npu:0")
self.model = self._load_model(model_path)
self.model.eval()
self.preprocessor = PointCloudPreprocessor(num_points=40000)
self.postprocessor = DetectionPostprocessor(
score_threshold=0.5,
nms_threshold=0.25
)
def infer(self, points):
"""
执行3D目标检测推理
返回:
detections: 检测结果列表
每个检测结果包含:
- class_id: 类别ID
- score: 置信度
- bbox_3d: 3D边界框 (center_x, center_y, center_z,
size_x, size_y, size_z,
heading)
"""
# 预处理
points_tensor = self.preprocessor.process(points)
points_tensor = points_tensor.to("npu:0")
# 推理
with torch.no_grad():
with torch.cuda.amp.autocast():
predictions = self.model(points_tensor)
# 后处理
detections = self.postprocessor.process(predictions)
return detections
class DetectionPostprocessor:
"""检测结果后处理器"""
def __init__(self, score_threshold=0.5, nms_threshold=0.25):
self.score_threshold = score_threshold
self.nms_threshold = nms_threshold
def process(self, predictions):
"""
处理模型预测输出
predictions:
- vote_xyz: [B, N, 3]
- vote_scores: [B, N, num_classes]
- bbox_preds: [B, N, num_classes, 3+4+1]
"""
vote_xyz = predictions['vote_xyz'][0].cpu().numpy()
vote_scores = predictions['vote_scores'][0].cpu().numpy()
bbox_preds = predictions['bbox_preds'][0].cpu().numpy()
detections = []
for i in range(vote_xyz.shape[0]):
max_score = vote_scores[i].max()
if max_score < self.score_threshold:
continue
class_id = vote_scores[i].argmax()
bbox = bbox_preds[i, class_id]
# 解析3D边界框
center = bbox[:3]
size = bbox[3:6]
heading = bbox[6]
detections.append({
'class_id': int(class_id),
'score': float(max_score),
'bbox_3d': {
'center': center.tolist(),
'size': size.tolist(),
'heading': float(heading)
}
})
# NMS去重
detections = self.nms(detections)
return detections
def nms(self, detections):
"""3D NMS"""
# 按分数排序
detections.sort(key=lambda x: x['score'], reverse=True)
keep = []
while detections:
# 保留最高分的检测
keep.append(detections[0])
# 移除与当前检测重叠高的检测
detections = [
d for d in detections[1:]
if self.compute_iou_3d(d, detections[0]) < self.nms_threshold
]
return keep
@staticmethod
def compute_iou_3d(det1, det2):
"""计算两个3D边界框的IoU"""
# 简化版本,实际应该使用3D IoU
box1 = det1['bbox_3d']
box2 = det2['bbox_3d']
# 计算中心距离
center1 = np.array(box1['center'])
center2 = np.array(box2['center'])
distance = np.linalg.norm(center1 - center2)
# 简单的距离阈值判断
size1 = np.array(box1['size'])
max_size1 = np.max(size1)
return 1.0 if distance < max_size1 * 0.5 else 0.0
性能优化技巧
1. 输入数据优化
"""
输入数据优化:批量处理和预加载
"""
import threading
import queue
class DataPipeline:
"""数据预加载管道"""
def __init__(self, dataset, batch_size=4, num_workers=4):
self.dataset = dataset
self.batch_size = batch_size
self.num_workers = num_workers
self.queue = queue.Queue(maxsize=16)
self.workers = []
self.running = False
def start(self):
"""启动数据加载管道"""
self.running = True
for worker_id in range(self.num_workers):
worker = threading.Thread(
target=self._worker_loop,
args=(worker_id,)
)
worker.start()
self.workers.append(worker)
def stop(self):
"""停止数据加载"""
self.running = False
for worker in self.workers:
worker.join()
def _worker_loop(self, worker_id):
"""工作线程循环"""
while self.running:
try:
# 获取数据索引
indices = self.dataset.get_batch_indices(
self.batch_size, worker_id
)
# 加载和预处理数据
batch = []
for idx in indices:
data = self.dataset.load_data(idx)
processed = self.dataset.preprocess(data)
batch.append(processed)
# 合并batch
batch_tensor = torch.stack(batch, dim=0)
# 放入队列
self.queue.put(batch_tensor)
except Exception as e:
print(f"Worker {worker_id} error: {e}")
def get_batch(self):
"""获取一个batch数据"""
return self.queue.get()
2. 混合精度推理
"""
混合精度推理配置
"""
class MixedPrecisionInference:
"""混合精度推理包装器"""
def __init__(self, model, amp_level='O2'):
self.model = model
self.amp_level = amp_level
# 配置混合精度
torch_npu.npu.set_amp_level(self.amp_level)
def infer(self, x):
"""使用混合精度执行推理"""
with torch.cuda.amp.autocast():
output = self.model(x)
return output
3. 动态Shape优化
"""
动态Shape优化策略
"""
class DynamicShapeOptimizer:
"""动态Shape优化器"""
def __init__(self, model):
self.model = model
self.compiled_models = {}
def infer(self, x):
"""根据输入shape选择优化后的模型"""
shape_key = tuple(x.shape)
# 检查是否有针对该shape优化的模型
if shape_key not in self.compiled_models:
# 为当前shape编译优化模型
self.compiled_models[shape_key] = self._compile_for_shape(
x.shape
)
# 使用优化后的模型执行
model = self.compiled_models[shape_key]
with torch.no_grad():
output = model(x)
return output
def _compile_for_shape(self, shape):
"""为特定shape编译优化模型"""
# 使用TorchScript优化
example_input = torch.randn(*shape).to("npu:0")
traced_model = torch.jit.trace(self.model, example_input)
traced_model = torch.jit.freeze(traced_model)
return traced_model.to("npu:0")
实际应用案例
自动驾驶场景理解
"""
自动驾驶场景理解应用
"""
class AutonomousDrivingSceneUnderstanding:
"""自动驾驶场景理解系统"""
def __init__(self):
# 深度估计
self.depth_estimator = DepthEstimationDeployment()
# 3D目标检测
self.object_detector = Object3DDetectionDeployment()
# 语义分割
self.semantic_segmenter = SemanticSegmentationDeployment()
def understand_scene(self, camera_image):
"""理解驾驶场景"""
# 1. 深度估计
depth_map = self.depth_estimator.infer(camera_image)
# 2. 3D目标检测
objects_3d = self.object_detector.infer_from_image(
camera_image, depth_map
)
# 3. 语义分割
segmentation = self.semantic_segmenter.infer(camera_image)
# 4. 融合理解
scene_understanding = {
'depth_map': depth_map,
'objects_3d': objects_3d,
'segmentation': segmentation,
'drivable_area': self.extract_drivable_area(
depth_map, segmentation
),
'collision_risk': self.assess_collision_risk(
objects_3d, depth_map
)
}
return scene_understanding
def extract_drivable_area(self, depth_map, segmentation):
"""提取可驾驶区域"""
# 使用语义分割识别道路区域
road_mask = segmentation == 7 # 道路类别
# 结合深度信息估计道路几何
road_points = self.depth_to_3d_points(depth_map, road_mask)
# 平面拟合得到可驾驶区域
drivable_area = self.fit_road_plane(road_points)
return drivable_area
def assess_collision_risk(self, objects_3d, depth_map):
"""评估碰撞风险"""
collision_risks = []
for obj in objects_3d:
# 计算物体到自车的距离
distance = obj['bbox_3d']['center'][2] # Z方向距离
# 评估风险等级
if distance < 5:
risk = 'HIGH'
elif distance < 15:
risk = 'MEDIUM'
else:
risk = 'LOW'
collision_risks.append({
'object': obj,
'distance': distance,
'risk_level': risk
})
return collision_risks
室内机器人导航
"""
室内机器人导航应用
"""
class IndoorRobotNavigation:
"""室内机器人导航系统"""
def __init__(self):
# 3D场景重建
self.scene_reconstructor = SceneReconstructor()
# 语义分割
self.semantic_segmenter = SemanticSegmentationDeployment()
# 目标检测
self.object_detector = Object3DDetectionDeployment()
# 路径规划
self.path_planner = PathPlanner()
def navigate_to_goal(self, current_view, goal_description):
"""导航到目标位置"""
# 1. 场景重建
scene_map = self.scene_reconstructor.update_map(current_view)
# 2. 语义理解
semantics = self.semantic_segmenter.infer(current_view)
# 3. 目标检测
objects = self.object_detector.infer_from_view(current_view)
# 4. 定位目标
goal_position = self.locate_goal(
goal_description, objects, semantics
)
# 5. 路径规划
path = self.path_planner.plan_path(
start=self.get_robot_position(),
goal=goal_position,
map=scene_map,
obstacles=objects
)
return path
def locate_goal(self, description, objects, semantics):
"""根据描述定位目标位置"""
# 简化实现:匹配关键词
keywords = description.lower().split()
for obj in objects:
obj_name = self.get_object_class_name(obj['class_id'])
if any(kw in obj_name for kw in keywords):
return obj['bbox_3d']['center']
return None
测试与验证
精度验证
"""
精度验证脚本
"""
def evaluate_depth_estimation(model, test_dataset):
"""评估深度估计模型精度"""
metrics = {
'abs_rel': [],
'sq_rel': [],
'rmse': [],
'rmse_log': [],
'a1': [],
'a2': [],
'a3': []
}
for data in test_dataset:
image = data['image']
gt_depth = data['depth']
# 推理
pred_depth = model.infer(image)
# 计算误差
valid_mask = (gt_depth > 0) & (gt_depth < 80)
abs_rel = np.mean(np.abs(gt_depth[valid_mask] - pred_depth[valid_mask]) / gt_depth[valid_mask])
sq_rel = np.mean(((gt_depth[valid_mask] - pred_depth[valid_mask]) ** 2) / gt_depth[valid_mask])
rmse = np.sqrt(np.mean((gt_depth[valid_mask] - pred_depth[valid_mask]) ** 2))
rmse_log = np.sqrt(np.mean((np.log(gt_depth[valid_mask]) - np.log(pred_depth[valid_mask])) ** 2))
# 准确率阈值
max_ratio = np.maximum(gt_depth[valid_mask] / pred_depth[valid_mask],
pred_depth[valid_mask] / gt_depth[valid_mask])
a1 = (max_ratio < 1.25).mean()
a2 = (max_ratio < 1.25 ** 2).mean()
a3 = (max_ratio < 1.25 ** 3).mean()
metrics['abs_rel'].append(abs_rel)
metrics['sq_rel'].append(sq_rel)
metrics['rmse'].append(rmse)
metrics['rmse_log'].append(rmse_log)
metrics['a1'].append(a1)
metrics['a2'].append(a2)
metrics['a3'].append(a3)
# 计算平均指标
for key in metrics:
metrics[key] = np.mean(metrics[key])
return metrics
性能基准测试
"""
性能基准测试
"""
import time
def benchmark_spatial_intelligence_model(model, test_data, num_iterations=100):
"""基准测试空间智能模型性能"""
latencies = []
throughputs = []
for _ in range(num_iterations):
# 随机选择测试数据
data = test_data.get_random_sample()
# 预热
for _ in range(5):
_ = model.infer(data)
# 测试
start = time.time()
output = model.infer(data)
torch_npu.npu.synchronize()
end = time.time()
latency = end - start
latencies.append(latency)
throughputs.append(1 / latency)
# 统计
results = {
'avg_latency_ms': np.mean(latencies) * 1000,
'p50_latency_ms': np.percentile(latencies, 50) * 1000,
'p95_latency_ms': np.percentile(latencies, 95) * 1000,
'p99_latency_ms': np.percentile(latencies, 99) * 1000,
'avg_throughput_fps': np.mean(throughputs)
}
return results
总结
cann-recipes-spatial-intelligence仓库为空间智能AI模型在昇腾平台上的部署提供了完整的优化方案。通过算子优化、模型转换、推理优化等技术手段,实现了深度估计、3D重建、点云处理等空间智能模型的高效部署。
关键优化技术包括:
- 深度可分离卷积等算子的融合优化
- 3D注意力机制的高效实现
- 混合精度推理平衡精度与性能
- 动态Shape优化适应不同输入
- 流水线并行提升系统吞吐
随着空间智能应用场景的不断扩展,CANN社区将持续提供针对新模型和新场景的优化方案,为空间智能技术的实际应用提供强大的算力支持。
参考资料
- CANN组织链接:https://atomgit.com/cann
- cann-recipes-spatial-intelligence仓库链接:https://atomgit.com/cann/cann-recipes-spatial-intelligence
- 深度解读昇腾CANN动态Shape图调度加速技术
- 昇腾CANN 7.0 黑科技:大模型推理部署技术解密

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)