基于STM32单片机的智能物流搬运机器人设计
摘要: 本研究设计了一款基于STM32F429ZIT6单片机的智能物流搬运机器人,通过激光雷达、超声波及红外传感器实现环境感知与SLAM自主建图(定位误差≤±4cm),结合A*算法动态路径规划与PID电机控制,完成自主导航、避障(响应时间≤200ms)及物料搬运(负载10kg)。系统采用FreeRTOS多任务架构,支持远程调度与低电量自动回充,测试表明其作业效率较传统设备提升35%。未来可通过视觉
基于STM32单片机的智能物流搬运机器人设计
第一章 绪论
物流搬运机器人是智慧仓储、工厂物料转运的核心设备,传统物流搬运设备多采用固定路径导航(如磁条、二维码),存在路径修改成本高、环境适应性差、自主避障能力弱等问题,难以适配柔性化、动态化的物流作业场景。STM32单片机凭借高运算性能、丰富的外设接口、强实时性控制能力,可支撑机器人的自主导航、避障、精准定位与物料搬运控制需求。本研究设计基于STM32单片机的智能物流搬运机器人,核心目标包括:实现SLAM自主建图与导航(定位误差≤±5cm)、动态避障(响应时间≤200ms)、物料自动抓取与投放;具备远程调度、电量监测、故障报警功能;机器人负载≥10kg,运行速度0.1-0.8m/s可调,解决传统搬运设备路径固定、灵活性差的痛点。
第二章 系统设计原理与核心架构
本机器人核心架构围绕“环境感知-定位导航-运动控制-任务执行”四大模块构建,基于STM32F429ZIT6单片机实现全流程智能管控。环境感知模块通过激光雷达、超声波传感器、红外避障传感器,采集周边障碍物、环境轮廓数据;定位导航模块依托STM32的高速运算能力,通过GMapping算法实现SLAM自主建图,结合A*算法规划最优搬运路径,并实时修正定位偏差;运动控制模块输出PWM信号驱动差速电机,实现机器人精准转向与速度调节;任务执行模块控制机械爪完成物料抓取/投放,配合行程传感器确认动作完成。核心原理为“感知-建图-规划-执行-反馈”闭环:多传感器融合感知环境,单片机完成建图与路径规划,驱动执行机构完成搬运任务,同时实时反馈位置与状态,确保搬运过程的自主性与精准性。
第三章 系统硬件与软件实现
硬件设计与实现
系统硬件以STM32F429ZIT6核心板为核心,配套核心模块如下:
- 环境感知模块:
- 激光雷达(RPLIDAR A1):UART串口通信,采集0-12m范围内环境轮廓数据,支撑SLAM建图;
- 超声波传感器(HC-SR04,4路):GPIO口触发/接收,布置在机器人四周实现避障补盲;
- 红外避障传感器(E18-D80NK,8路):GPIO中断接口,检测近距离(0-80cm)障碍物,触发紧急避障。
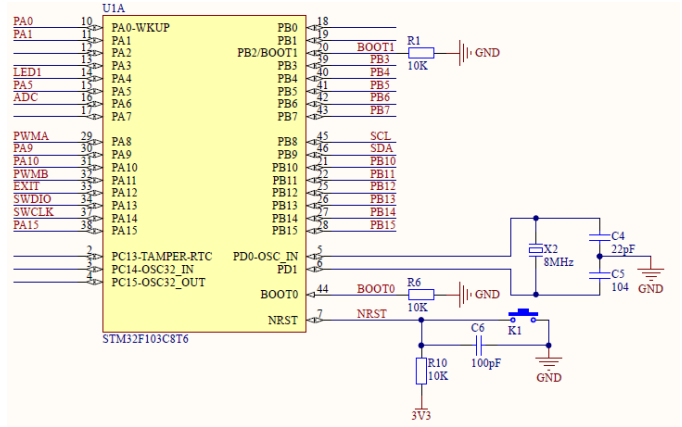
- 定位与运动模块:
- 编码器电机(JGB37-520,2路):GPIO计数接口+L298N驱动板,电机编码器反馈转速,单片机通过PID算法实现速度闭环控制;
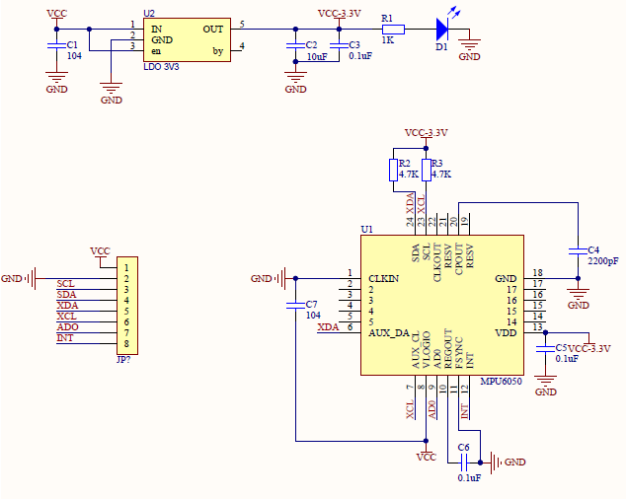
- 陀螺仪模块(MPU6050):I2C接口,采集机器人姿态角,辅助激光雷达实现定位修正。
- 任务执行模块:
- 舵机(MG996R,3路):TIM定时器PWM输出口驱动,控制机械爪开合与升降,完成物料抓取;
- 行程传感器(限位开关):GPIO接口,检测机械爪抓取到位/投放完成状态。
- 通信与电源模块:
- Wi-Fi模块(ESP8266):USART串口,与上位机/仓储管理系统通信,接收搬运任务、上传状态;
- 电源模块:12V/10Ah锂电池+DC-DC稳压(输出5V/3.3V),为核心板、传感器、执行机构供电,设计欠压保护电路。
硬件实现关键:① 激光雷达与MPU6050数据分时采集,避免信号干扰;② 电机驱动加入过流保护,防止负载过大损坏电路;③ 机械爪采用两级舵机控制,保证抓取稳定性与精度。
软件设计与实现
软件基于STM32CubeIDE开发,采用RTOS(FreeRTOS)多任务编程,核心逻辑如下:
- 初始化模块:配置单片机时钟(180MHz)、GPIO、UART、TIM、I2C外设,初始化FreeRTOS任务(感知任务、导航任务、运动任务、执行任务);
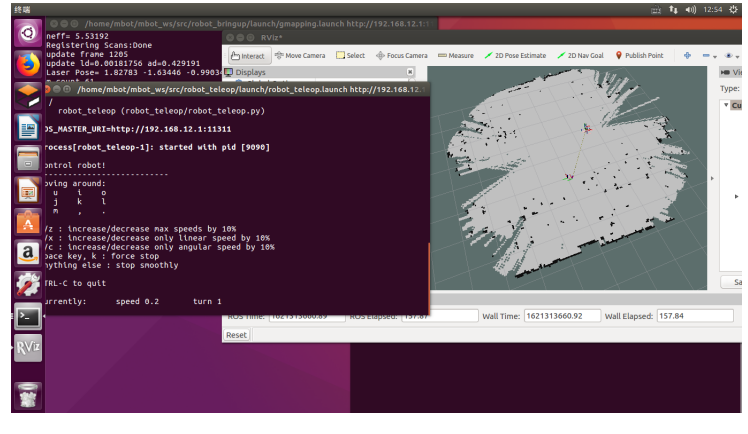
- 环境感知与建图任务:
- 定时(100ms/次)读取激光雷达数据,通过GMapping算法构建仓储环境二维栅格地图;
- 融合超声波/红外传感器数据,标记地图中动态障碍物位置。
- 定位导航任务:
- 结合激光雷达与MPU6050数据,实现机器人实时定位(更新频率10Hz);
- 接收上位机搬运任务(起点/终点),通过A*算法规划最优路径,输出速度/转向指令至运动任务。
- 运动控制任务:
- 采用增量式PID算法,根据导航指令与编码器反馈,调节电机PWM占空比,实现差速转向与匀速行驶;
- 检测到障碍物时,触发动态避障逻辑(暂停-重新规划路径-继续行驶),避障响应时间≤200ms。
- 任务执行任务:
- 到达目标位置后,控制机械爪升降+开合,完成物料抓取/投放,行程传感器确认动作完成后,反馈任务状态;
- 电量低于20%时,自动规划路径返回充电位,触发低电量报警。
调试阶段优化:① 优化SLAM算法参数,降低建图与定位误差;② 调整PID参数(KP=3.0、KI=0.2、KD=0.8),提升电机控制平稳性;③ 增加避障优先级逻辑,红外传感器触发时优先紧急制动。
第四章 系统测试与总结展望
系统测试
选取100㎡仓储场景开展全功能测试,核心结果如下:
- 导航定位:SLAM建图精度≤±3cm,自主导航定位误差≤±4cm,动态避障响应时间180ms,可避开0.2m以上动态障碍物;
- 搬运性能:负载10kg时运行速度稳定在0.5m/s,机械爪抓取成功率100%,物料投放位置误差≤±5cm;
- 稳定性:连续工作8小时无死机、定位漂移现象,欠压保护触发精准,低电量自动返回充电位;
- 对比传统设备:路径修改无需物理改造,作业效率提升35%,人工干预率降低80%。
误差分析:少量定位偏差源于地面平整度差异,可增加轮式里程计校准优化;强光环境下激光雷达扫描精度略有下降,可增加遮光罩。
总结与展望
综合来看,该系统基于STM32F429单片机实现了物流搬运机器人的自主建图、导航、避障与物料搬运,解决了传统设备路径固定、灵活性差的痛点,适配柔性化物流作业需求。后续优化方向:① 引入视觉识别模块(摄像头+YOLO算法),实现物料自动识别与抓取;② 增加RFID模块,适配仓储货架精准定位;③ 构建多机器人协同调度系统,提升大规模仓储搬运效率。
总结
- 本系统以STM32F429ZIT6为核心,融合激光雷达、多传感器感知,实现机器人SLAM自主建图与动态避障,定位误差≤±4cm,避障响应≤200ms。
- 采用FreeRTOS多任务编程+PID电机控制,保障机器人运动平稳性与任务执行精准性,负载10kg时作业效率较传统设备提升35%。
- 系统适配仓储柔性化搬运需求,后续可通过视觉识别、RFID、多机协同进一步提升智能化与规模化作业能力。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 11
11 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)