Active Exploration方向论文精读
FASTEX 的成功给所有从事移动机器人探索(包括水下机器人不要浪费远处的信息:即使传感器精度在远处下降,用它来构建粗略的连通性图 (Connectivity Graph) 也能大幅提升规划的全局视野。增量式思维:在动态环境中,完全重算往往是没必要的。局部精细更新 + 全局拓扑维护”是解决大规模问题的金钥匙。对于水下扫测应用,FASTEX 的Segment思想尤为可贵——可以将长距离的声纳扫测条带
深度解读 FASTEX:大场景无人机自主探索的“极速”之道
论文题目:FASTEX: Fast UAV Exploration in Large-Scale Environments Using Dynamically Expanding Grids and Coverage Paths
会议来源:IROS 2025 (Hangzhou, China)
核心关键词:自主探索、覆盖路径规划、动态网格、增量式规划、ATSP/SOP
在大规模复杂环境(如茂密森林、地下洞穴)中进行自主探索,一直是移动机器人领域的“硬骨头”。现有的顶尖算法(如 FUEL, TARE, RACER)往往面临着两难抉择:要么为了算得快而牺牲全局覆盖率,要么为了追求完美路径而导致计算量爆炸 。
2025年 IROS 的这篇 FASTEX 论文提出了一套全新的解决方案,通过高效的环境预处理和层次化的增量规划框架,实现了探索效率与计算速度的双重突破。
本文将从原理层面,带你详细拆解它的三大核心模块。
一、 核心痛点与解决思路
在传统的探索框架中,随着地图的扩大,系统需要处理的数据量呈指数级增长。主要瓶颈在于:
-
地图维护重:仅更新传感器截断距离内的地图,浪费了远处的感知信息 。
-
路径搜索慢:在大尺度栅格地图上进行 A* 搜索极其耗时 。
-
重复路径多:贪婪策略容易导致机器人频繁“折返跑
FASTEX 的破局之道:
-
预处理层:用 动态扩展网格 (DEGrids) 替代传统固定边界,并构建 稀疏路线图 (Sparse Roadmap) 加速搜索。
-
决策层:将全局规划建模为 ATSP (非对称旅行商问题),并采用增量式 (Incremental) 更新策略;将局部规划建模为 SOP (顺序排序问题) 以保证执行连贯性 。
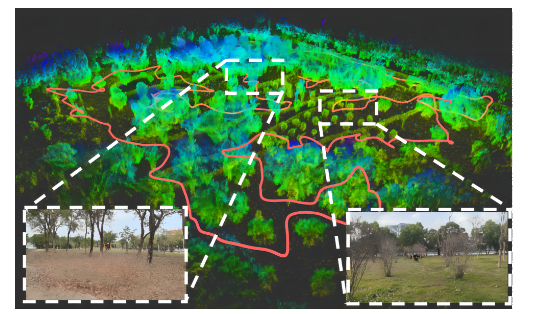
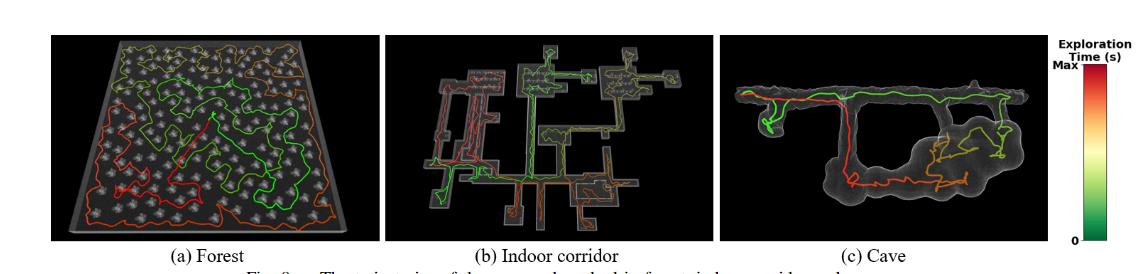
这是真实森林里的探索结果。注意那条红色的轨迹,它非常平滑且覆盖了整个区域,没有像无头苍蝇一样乱撞 。
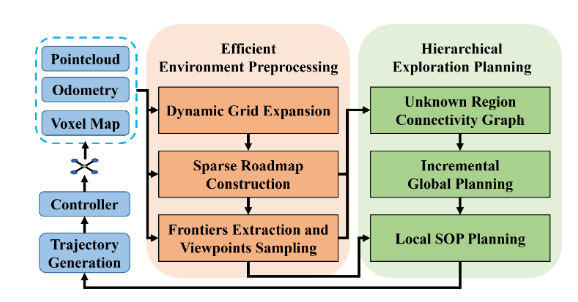
这是系统的“大脑结构图”。
- 左边是 环境预处理 (Preprocessing):负责把复杂的点云简化成网格和路线图 。
-
右边是 分层规划 (Hierarchical Planning):先由 Global Planner 定大方向,再由 Local Planner 走好脚下的路 。
二、 高效环境预处理 (Efficient Environment Preprocessing)
这一模块是整个系统“快”的基础。
1. 动态扩展网格 (DEGrids)
传统方法通常会截断 LiDAR 数据(例如只保留 15m 内的点)。FASTEX 认为,远处的数据虽然稀疏,但足以判断区域的连通性 。
-
机制:网格不是预先分配的,而是根据点云实时生成的。
-
状态机:每个网格维护三种状态 :
-
Unexplored (未探索):刚初始化的网格。
-
Exploring (探索中):网格内检测到了新的边界点 (Frontiers)。
-
Explored (已探索):网格内的边界点已被清空。
这种设计让系统能快速锁定“哪里还有未知区域”,而无需遍历整个地图。
-
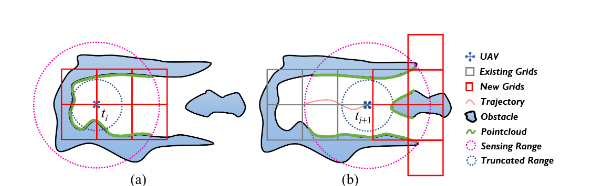
- 无人机 (UAV) 在中间 。
- 蓝色格子 (Existing Grids):是已经建立的已知区域 。
- 红色格子 (New Grids):这是亮点!无人机探测到了传感器截断距离以外的点,系统没有丢弃它们,而是立刻生成了红色的新网格 。
-
意义:这让无人机有了“超视距”的感知能力,知道远处哪里可能通,不用飞到了再算。
2. 增量式稀疏路线图 (Incremental Roadmap)
为了避免在稠密的体素地图上跑 A*,系统构建了一个稀疏图:
-
节点来源:
-
固定节点:在 DEGrids 生成时按固定分辨率采样 。
-
随机节点:在传感器更新范围内随机撒点(增强连通性) 。
-
动态激活:只有处于“Exploring”状态网格内的节点才是活跃 (Active) 的。一旦网格变为“Explored”,其内部节点自动休眠 (Inactive),不再参与路径搜索。这使得搜索图的规模始终维持在一个较小水平,不随环境变大而膨胀 。
-
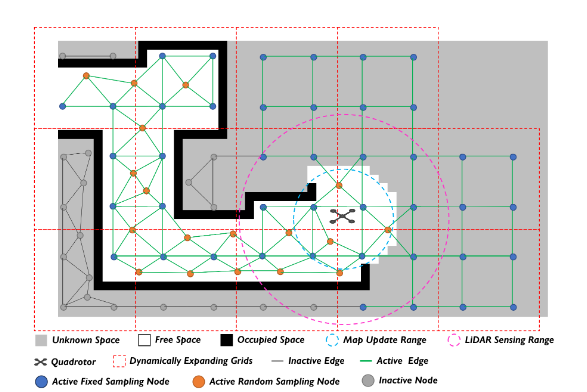
图解:
-
蓝色点 (Fixed Nodes):每个格子里固定生成的“公交站点” 。
-
橙色点 (Random Nodes):在空旷区域随机撒的“临时停靠点”,增加连通性 。
-
实线 (Active Edge):当前正在探索区域的路,是通的 。
- 虚线 (Inactive Edge):后面灰色的区域(Explored Grid)已经探索完了,路网自动休眠,不再参与计算 。
-
意义:用完即弃。只维护无人机附近的活跃路网,计算量不再随地图变大而爆炸。
-
三、 层次化探索规划 (Hierarchical Exploration Planning)
这是论文的算法核心,分为全局和局部两层。
1. 全局覆盖路径规划 (Global Coverage Path Planning)
目标:规划一条能遍历所有可达未知区域 (Reachble Unknown Regions, RUR) 的最短时间路径。
A. 物理感知的时间代价模型
不同于简单的欧几里得距离,FASTEX 考虑了无人机的加减速动力学。两点间的转移时间t被计算为 :
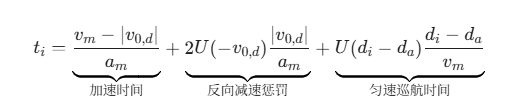
这个公式确保了规划器倾向于选择顺畅的直线路径,而不是需要频繁急停急转的路径。
B. 增量式规划策略 (Incremental Planning) [核心创新]
为了解决大场景下 TSP 求解慢的问题,FASTEX 提出了一种“近细远粗”的策略 :
-
-
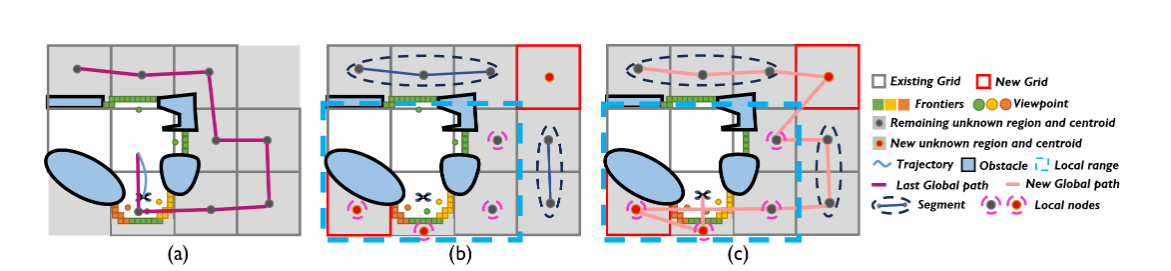
这张图解释了系统是如何在毫秒级的时间内,更新一条横跨整个大地图的规划路径的。它的核心逻辑可以概括为:“近处精细算,远处打包算”。
我们按 (a) -> (b) -> (c) 的顺序来拆解这个过程:
图 (a):上一秒的记忆 (The Past)
-
状态:这是无人机在上一时刻规划好的全局路径。
-
紫红色的折线 (Last Global path):连接了所有当时已知的“未知区域中心点”(灰点)。
-
问题:随着无人机(中间的 X)向前飞,它发现了新的环境信息(比如前面的橙色/绿色格子),而且原来的路径可能已经不再是最优的了,必须重算。
-
图 (b):聪明的分类与压缩 (The Process)
这是算法发挥“魔法”的时刻。系统没有把所有点扔进池子里重算,而是进行了分类:
划定“精算区” (Local Range):
-
看到那个粗的蓝色虚线框了吗?这是以无人机为中心的局部范围(Local Range,
)。
-
在这个框以内的点(带有粉色光圈的点),被认为是“当务之急”,保留为独立节点,参与全量计算。
-
-
远处“打包” (Segmentation):
-
在蓝色框以外的路径,被认为是“以后再去的地方”。
-
注意上方和右侧的深蓝色虚线椭圆 (Segments)。算法把这些远处的连续节点直接打包成了线段 。
-
省流原理:算法不再关心椭圆内部这几个点怎么走(因为上一秒已经算过了),只关心从哪里进(粉圈 Entry)、从哪里出(蓝圈 Exit)。这把几十个点的计算量瞬间压缩成了2个点。
-
-
吸纳新目标 (New Discovery):
-
注意左下角和右上角的红框 (New Grid) 和 红点 (New unknown region)。
-
这是无人机刚刚探测到的新未知区域。它们被直接加入到了当前的规划池中 。
-
-
粉红色的实线 (New Global path):这是求解 ATSP 后生成的新路径。
-
路径逻辑:
-
无人机先处理了近处新发现的红点(左下角)。
-
然后顺路去看了近处原本遗留的灰点。
-
最后才飞向远处的“打包线段”(右上角)。
-
-
关键点:注意右上角那个红点(新发现的远方目标),它被插入到了路径的末端。算法非常智能地把新任务插入到了全局最优的位置,而没有打乱远处线段内部的顺序。
-
图 (c):新的规划结果 (The Result)
-
局部范围内:保留所有独立节点,进行精细规划。
-
局部范围外:利用上一帧的规划结果,将连续的远端节点打包成线段 (Segments)。
-
数学建模:在构建 ATSP 代价矩阵时,线段内部的连接代价被设为负无穷,强制求解器必须按顺序访问线段,从而将 N 个节点的排序问题降维成少量线段的排序问题 。
2. 局部 SOP 规划 (Local SOP Planning)
目标:在全局路径的引导下,优化局部视点 (Viewpoints) 的访问顺序,生成平滑轨迹。
问题建模:这是一个 顺序排序问题 (SOP)。
-
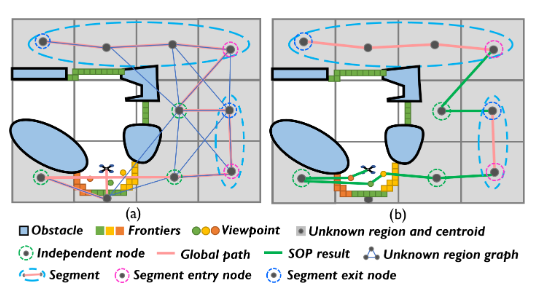
简单来说,这张图回答了这样一个问题:“当全局导航告诉我‘往东走’,但我发现身边有一堆零散的角落没看时,我该先看哪个,再怎么顺路接上大方向?”
以下是分步拆解:
图 (a):规划前的状态与输入
左图展示了机器人(无人机)在做局部决策时面临的信息:
-
当前位置 (X):
-
图中间那个黑色的 X 代表无人机的位置。
-
-
眼前的任务 (Viewpoints):
-
无人机附近有一些黄色的方块(Frontiers,未探索边界)。
- 为了看清这些边界,算法生成了几个小圆点(Viewpoints,视点),即图中央那一簇橙色/绿色的小点。这是无人机必须要去的地方 。
- 这里补充一下,如何生成的小圆点呢?
1. 第一步:找到“边界” (Frontiers Extraction)
视点存在的意义是为了消除未知。所以首先要找到已知空间 (Free Space) 和 未知空间 (Unknown Space) 的交界处。
-
做法:系统遍历体素地图,如果一个体素是“未知的”,但它旁边紧挨着“已知的空闲”体素,那它就是边界体素 (Frontier Voxel) 。
-
结果:这一步得到了一堆零散的边界点。
-
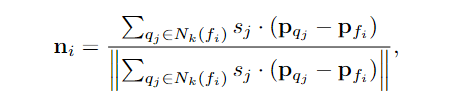
2. 第二步:计算“朝向” (Normal Estimation)
找到边界还不够,无人机必须知道站在哪里看才能看清这个边界。这就需要计算边界的法向量 (Normal)。
-
核心逻辑:如果一面墙在我面前,我必须正对着它看,而不是站在侧面或后面。
-
公式 (Equation 1): 论文通过计算边界体素周围 K×K×K个邻域内的几何中心偏移量来估算法向量
-
-
这里的
是权重,只有当邻居体素是“空闲 (Free)”时才为 1,否则为 0。
-
目的:确保算出来的法向量
也是指向空闲空间的(即无人机可以飞到的地方)
-
-
3. 第三步:聚类与采样 (Clustering & Sampling)
如果对每一个边界体素都生成一个视点,计算量会太大。
-
聚类:将空间上挨得很近的一大坨边界体素打包成一个簇 (Cluster) 。
-
采样生成:对于每一个簇,根据它包含的边界点的平均位置和平均法向量,反推一个最佳观测位置。
-
这个位置通常位于:边界中心 + 沿法向量方向延伸一定距离。
-
形象理解:假设发现了一块未知的“黑幕”,算法算出黑幕的中心,然后沿着垂直于黑幕的方向往后退几米,那个位置就是生成的视点 (Viewpoint)。
-
- 这里补充一下,如何生成的小圆点呢?
-
-
远方的指引 (Global Path):
-
粉红色的折线是全局规划器算出来的路径。它连接了所有灰色的点(未知区域中心)。
-
这条线的意义是告诉无人机:“大方向是沿着粉线往右上方探索”。
-
-
分段策略 (Segmentation) —— 关键细节:
-
请注意那些蓝色的虚线椭圆 (Segments)。
-
算法把远处的那些灰色点打包成了“线段(Segment)”。
-
粉色虚线圈是“入口点 (Entry node)”,蓝色虚线圈是“出口点 (Exit node)” 。
-
意义:对于远处的路,局部规划器不需要关心具体怎么走,只需要知道“从哪进、从哪出”就行,这样简化了计算。
-
-
先清理局部 (Local Exploration):
- 绿线从 X 出发,并没有直接飞向远方,而是先灵巧地串联了附近那几个视点(Viewpoints)。这保证了无人机能把身边的死角先扫干净,避免以后还要折返 。
-
顺势切入全局 (Align with Global):
-
扫完局部视点后,绿线非常顺滑地连接到了最近的一个独立节点 (Independent node)(绿色虚线圈里的灰点)。
-
随后,它沿着全局路径(粉线)的方向,指向了远处蓝色椭圆的“入口”。
-
-
顺序约束 (Constraints):
-
注意绿线是严格顺着粉线的流向走的。
-
SOP 算法在数学上强制了这种顺序(通过将逆向代价设为 -1),防止无人机因为贪图距离近,跳过中间的步骤直接飞到远处的出口 。
-
-
图 (b):规划后的结果 (SOP Result)
右图展示了计算出的最终飞行路径(绿色实线):
-
广义节点:将全局路径中剩余的部分看作一个“超级节点”。
-
约束矩阵:
矩阵下三角的
是硬约束,意味着必须先完成当前行的任务,才能执行下一行的任务 。这保证了机器人不会为了贪图远处的一个点而打乱整体的覆盖节奏。
四、 实验数据与效果
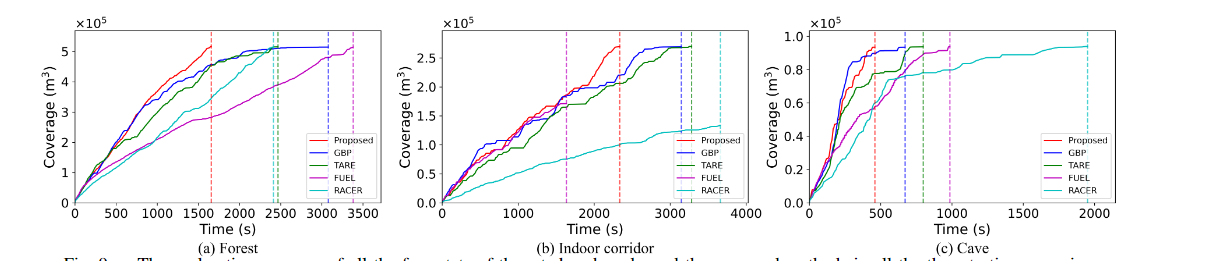
研究团队在模拟器 (MARSIM) 和真实环境(森林、花园)中进行了广泛测试,对比了 FUEL, RACER, GBP, TARE 等主流算法。
1. 效率对比 (Efficiency)
在森林、走廊和洞穴三个场景中,FASTEX 的探索时间最少,相比其他算法提升了 25% ~ 30% 。
-
森林场景:比 RACER 快 29.4%。
-
走廊场景:比 TARE 快 25.8%。
2. 计算开销 (Computational Cost)
这是最惊人的数据。得益于稀疏路线图和增量规划,FASTEX 的单次规划耗时极低:
-
平均规划耗时:仅需 0.04s ~ 0.09s 。
-
相比之下,GBP 和 TARE 在复杂场景下往往需要数秒甚至更长。
-
3. 实机验证
在配备 Intel NUC (i7) 和 Livox Mid-360 LiDAR 的四旋翼无人机上,FASTEX 成功在 608秒内完成了 的森林探索,轨迹平滑且几乎没有冗余的重复访问 。
五、 总结与启示
FASTEX 的成功给所有从事移动机器人探索(包括水下机器人)的研究者提供了两个重要的设计思路:
-
不要浪费远处的信息:即使传感器精度在远处下降,用它来构建粗略的连通性图 (Connectivity Graph) 也能大幅提升规划的全局视野。
-
增量式思维:在动态环境中,完全重算往往是没必要的。“局部精细更新 + 全局拓扑维护”是解决大规模问题的金钥匙。
对于水下扫测应用,FASTEX 的 Segment 思想尤为可贵——可以将长距离的声纳扫测条带视为一个 Segment,只在转弯换线(局部)时进行精细的动力学规划,这将极大节省板端计算资源。
1. 根据当前视角定义下一最佳视角
对应文章 III. 高效环境预处理(III.A-III.C),核心是通过环境感知与候选视点生成,明确 “潜在最佳视角” 的范围与筛选标准:
- 动态网格扩展(III.A):基于实时点云数据增量创建网格,标记 “未探索 / 探索中 / 已探索” 状态,锁定可达未知区域(RUR),为视角定义划定空间范围。
- 稀疏路线图构建(III.B):生成固定节点(网格内)和随机节点(地图更新范围),动态标记活跃 / 非活跃状态,确保候选视角的可达性校验基础。
- 边界提取与视点采样(III.C):提取自由空间与未知空间的边界体素,计算指向自由空间的法向量,聚类形成边界簇后,基于簇内体素和法向量采样候选视点,完成 “下一最佳视角” 的候选集定义。
2. 下一视角的选择
对应文章 IV. 分层探索规划(IV.A-IV.C),核心是通过全局优先级约束与局部优化,从候选集中筛选出最优视角:
- 未知区域连通图(IV.A):建模可达未知区域的连通关系,仅保留有探索价值的 RUR centroids 作为全局规划节点,缩小视角选择的空间范围。
- 全局覆盖路径规划(IV.B):通过增量式 ATSP 算法,优先规划邻近未知区域的全局路径,确定下一视角所在的目标区域优先级。
- 局部 SOP 规划(IV.C):将局部候选视点与全局路径约束结合,构建 SOP 成本矩阵(强制局部视角访问顺序与全局一致),筛选出 “旅行成本最低、覆盖效率最高” 的具体下一视角(确保首目标为视点)。
3. 移动到下一视角
对应文章 IV.C 局部路径规划 + 路径搜索机制,核心是生成可行、平滑的移动轨迹:
- 路径可达性校验:通过稀疏路线图(III.B)和混合 A策略(IV.B),快速搜索当前视角到下一视角的最短路径(跨网格用路线图 A,同网格用体素 A*)。
- 轨迹生成:采用 B-spline 轨迹生成方法(IV.C 结尾),结合无人机动力学约束(最大速度 / 加速度),生成安全、平滑的可执行轨迹。
- 实时调整:通过网格状态动态更新(III.A)和路线图节点激活 / 灭活(III.B),确保移动过程中规避障碍物,适配环境变化。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)