轮式移动机器人轨迹跟踪控制:基于双闭环与非线性ESO的MATLAB实现
本文分析了一个轮式移动机器人轨迹跟踪控制的MATLAB仿真程序。该系统采用双闭环控制结构,结合了运动学控制器和动力学控制器,并引入了非线性扩张状态观测器(ESO)来估计和补偿系统中的总扰动。该控制方案借鉴了自抗扰控制技术的思想,在存在摩擦力和外部扰动的情况下,实现了对参考轨迹的精确跟踪。
轮式移动机器人轨迹跟踪的MATHLAB程序,运用运动学和动力学模型的双闭环控制,借鉴自抗扰控制技术结合了非线性ESO,跟踪效果良好,控制和抗扰效果较优,可分享控制结构图。 这段程序主要是一个小车的动力学仿真程序,用于模拟小车在参考轨迹下的运动。下面我将对程序进行详细的分析解释。 首先,程序开始时使用`clear`、`clc`和`close all`命令来清除工作空间、命令窗口和图形窗口中的内容。 接下来,程序定义了一系列参数和变量,用于设置仿真的参数和存储仿真过程中的数据。这些参数包括小车的质量、车宽、驱动轮半径等,还有参考轨迹的振幅和频率,仿真步长,仿真时间等。 然后,程序定义了一些元胞数组,用于存储不同阶段的数据。这些数组包括参考轨迹位姿、真实运动轨迹位姿、参考轨迹一阶导数、虚拟参考轨迹速度、期望速度、真实速度、控制器输出的控制力矩、控制输入、期望速度与真实速度误差、摩擦值、外界扰动值、总扰动、位姿跟踪误差、扰动观测值等。 接下来,程序给这些变量赋初始值,包括小车的初始位姿和速度,虚拟初始速度,期望初始速度,控制器输出的控制力矩,扰动观测值等。 然后,程序进入一个循环,仿真时间从0到给定的仿真时间tf。在每个循环中,程序根据给定的参考轨迹生成圆形参考轨迹,并计算参考轨迹的一阶导数和虚拟参考轨迹速度。 接下来,程序计算位姿误差,并使用运动学控制器计算期望速度。然后,程序使用非线性ESO(Extended State Observer)估计速度扰动,并使用动力学控制器计算控制力矩。最后,程序根据控制力矩和扰动计算小车的实际速度和位姿,并计算位姿跟踪误差。 在每个循环结束时,程序更新时间和循环索引,并继续下一次循环,直到仿真时间达到设定的结束时间tf。 最后,程序绘制了多个图形来展示仿真结果。这些图形包括参考轨迹和实际运动轨迹的图像、参考轨迹角度和实际角度的图像、内环速度误差的图像、位姿跟踪误差的图像、线速度扰动和观测器估计的图像、角速度扰动和观测器估计的图像、速度曲线的图像和控制量输入的图像。 通过这些图形,可以直观地了解小车在参考轨迹下的运动情况,以及控制器的性能和位姿跟踪误差等。 这段程序涉及到的知识点包括动力学方程、参考轨迹生成、运动学控制器、非线性ESO、动力学控制器等。它主要用于解决小车在给定参考轨迹下的运动控制问题,通过控制器输出的控制力矩来控制小车的速度和位姿,以实现对参考轨迹的跟踪。
1. 系统概述
本文分析了一个轮式移动机器人轨迹跟踪控制的MATLAB仿真程序。该系统采用双闭环控制结构,结合了运动学控制器和动力学控制器,并引入了非线性扩张状态观测器(ESO) 来估计和补偿系统中的总扰动。该控制方案借鉴了自抗扰控制技术的思想,在存在摩擦力和外部扰动的情况下,实现了对参考轨迹的精确跟踪。
2. 控制系统架构
2.1 双闭环控制结构
系统采用分层控制策略:
- 外环(运动学控制层):处理位姿跟踪误差,生成期望的速度指令
- 内环(动力学控制层):实现速度跟踪,输出控制力矩
2.2 非线性ESO设计
系统设计了非线性扩张状态观测器,用于实时估计和补偿系统中的总扰动,包括摩擦力和外部扰动,这是保证系统鲁棒性的关键。
3. 核心算法实现
3.1 系统建模
机器人动力学方程简化为:
M_ba*V_dot + Vm_ba*V + F_ba + tau_d_ba = tau_ba其中:
M_ba为系统惯性矩阵F_ba为摩擦力项taudba为外部扰动tau_ba为控制力矩
3.2 轨迹生成模块
系统支持圆形参考轨迹生成:
q_r{1}(1:3,k) = [A*cos(omega*to); A*sin(omega*to); omega*to+pi/2];3.3 坐标变换与误差计算
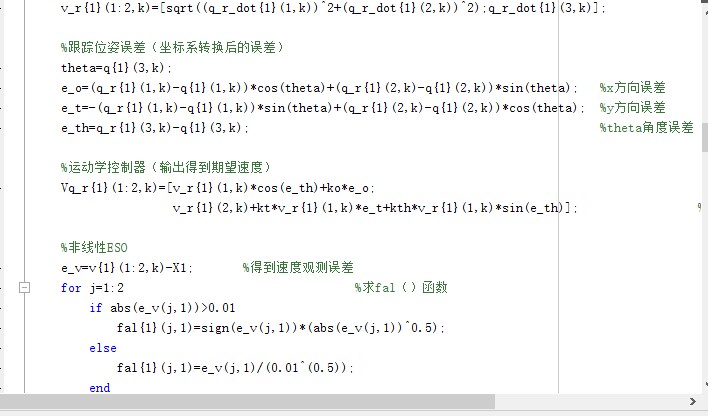
将全局坐标系下的跟踪误差转换到机器人本体坐标系:
theta = q{1}(3,k);
e_o = (q_r{1}(1,k)-q{1}(1,k))*cos(theta) + (q_r{1}(2,k)-q{1}(2,k))*sin(theta);
e_t = -(q_r{1}(1,k)-q{1}(1,k))*sin(theta) + (q_r{1}(2,k)-q{1}(2,k))*cos(theta);
e_th = q_r{1}(3,k)-q{1}(3,k);3.4 运动学控制器
基于转换后的误差计算期望速度:
Vq_r{1}(1:2,k) = [v_r{1}(1,k)*cos(e_th) + ko*e_o;
v_r{1}(2,k) + kt*v_r{1}(1,k)*e_t + kth*v_r{1}(1,k)*sin(e_th)];3.5 非线性ESO实现
ESO通过非线性函数处理观测误差,实现扰动的精确估计:
% 非线性fal函数
if abs(e_v(j,1)) > 0.01
fal{1}(j,1) = sign(e_v(j,1))*(abs(e_v(j,1))^0.5);
else
fal{1}(j,1) = e_v(j,1)/(0.01^(0.5));
end
% ESO状态更新
X1 = X1 + h*(X2 - zo*e_v + U{1}(1:2,k-1));
X2 = X2 - h*zt*fal{1}(1:2,1);
X3{1}(1:2,k) = -M_ba*X2; % 扰动观测值3.6 动力学控制器
结合ESO的扰动估计和速度误差反馈,计算控制力矩:
ec{1}(1:2,k) = Vq_r{1}(1:2,k) - v{1}(1:2,k);
tau_ba{1}(1:2,k) = X2 + Kf*ec{1}(1:2,k);
U{1}(1:2,k) = inv(M_ba)*tau_ba{1}(1:2,k);4. 系统仿真与性能分析
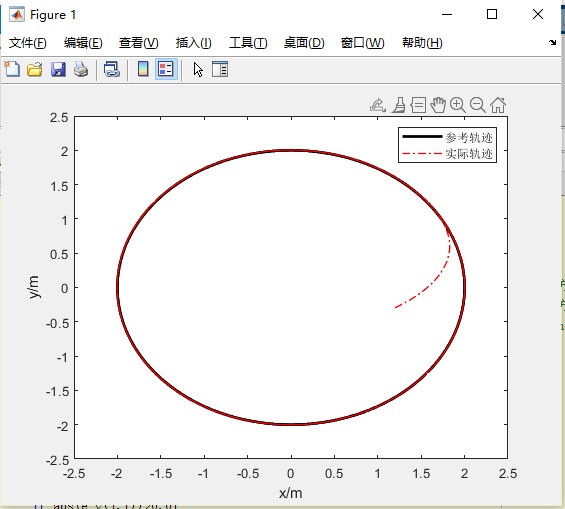
程序提供了全面的可视化分析,包括:
- 轨迹跟踪效果:实际轨迹与参考轨迹的对比
- 角度跟踪:方向角的跟踪性能
- 速度误差:内环线速度和角速度的跟踪误差
- 位姿误差:x、y方向和角度的跟踪误差
- 扰动观测:ESO对系统扰动的估计效果
- 速度曲线:虚拟、期望和实际速度的对比
- 控制输入:控制器输出的控制量
5. 技术特点与优势
5.1 抗扰动性能
通过非线性ESO实时估计并补偿系统总扰动,显著提高了系统在存在摩擦和外部干扰情况下的鲁棒性。
5.2 双闭环设计优势
- 运动学外环:保证位姿跟踪精度
- 动力学内环:实现快速速度响应
- 解耦设计:简化控制器设计复杂度
5.3 非线性处理能力
采用非线性函数处理观测误差,增强了ESO在较大误差范围内的估计性能。
6. 应用价值
该控制方案适用于各类轮式移动机器人的轨迹跟踪任务,特别在以下场景中表现优异:
- 存在未知扰动的工作环境
- 需要高精度轨迹跟踪的应用
- 系统参数变化较大的情况
仿真结果表明,该控制策略能够有效抑制扰动影响,实现平滑、精确的轨迹跟踪,为实际轮式机器人控制系统设计提供了可靠的理论基础和实践参考。
轮式移动机器人轨迹跟踪的MATHLAB程序,运用运动学和动力学模型的双闭环控制,借鉴自抗扰控制技术结合了非线性ESO,跟踪效果良好,控制和抗扰效果较优,可分享控制结构图。 这段程序主要是一个小车的动力学仿真程序,用于模拟小车在参考轨迹下的运动。下面我将对程序进行详细的分析解释。 首先,程序开始时使用`clear`、`clc`和`close all`命令来清除工作空间、命令窗口和图形窗口中的内容。 接下来,程序定义了一系列参数和变量,用于设置仿真的参数和存储仿真过程中的数据。这些参数包括小车的质量、车宽、驱动轮半径等,还有参考轨迹的振幅和频率,仿真步长,仿真时间等。 然后,程序定义了一些元胞数组,用于存储不同阶段的数据。这些数组包括参考轨迹位姿、真实运动轨迹位姿、参考轨迹一阶导数、虚拟参考轨迹速度、期望速度、真实速度、控制器输出的控制力矩、控制输入、期望速度与真实速度误差、摩擦值、外界扰动值、总扰动、位姿跟踪误差、扰动观测值等。 接下来,程序给这些变量赋初始值,包括小车的初始位姿和速度,虚拟初始速度,期望初始速度,控制器输出的控制力矩,扰动观测值等。 然后,程序进入一个循环,仿真时间从0到给定的仿真时间tf。在每个循环中,程序根据给定的参考轨迹生成圆形参考轨迹,并计算参考轨迹的一阶导数和虚拟参考轨迹速度。 接下来,程序计算位姿误差,并使用运动学控制器计算期望速度。然后,程序使用非线性ESO(Extended State Observer)估计速度扰动,并使用动力学控制器计算控制力矩。最后,程序根据控制力矩和扰动计算小车的实际速度和位姿,并计算位姿跟踪误差。 在每个循环结束时,程序更新时间和循环索引,并继续下一次循环,直到仿真时间达到设定的结束时间tf。 最后,程序绘制了多个图形来展示仿真结果。这些图形包括参考轨迹和实际运动轨迹的图像、参考轨迹角度和实际角度的图像、内环速度误差的图像、位姿跟踪误差的图像、线速度扰动和观测器估计的图像、角速度扰动和观测器估计的图像、速度曲线的图像和控制量输入的图像。 通过这些图形,可以直观地了解小车在参考轨迹下的运动情况,以及控制器的性能和位姿跟踪误差等。 这段程序涉及到的知识点包括动力学方程、参考轨迹生成、运动学控制器、非线性ESO、动力学控制器等。它主要用于解决小车在给定参考轨迹下的运动控制问题,通过控制器输出的控制力矩来控制小车的速度和位姿,以实现对参考轨迹的跟踪。
通过调整控制器参数和观测器参数,该方案可以进一步优化以适应不同的应用需求和性能指标,展现了良好的工程应用前景。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 12
12 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)