多智能体协同编队控制:基于分布式模型预测控制方法的Matlab仿真实现
分布式模型预测控制旨在将复杂的全局控制问题分解为多个局部子问题,每个智能体仅依据自身及邻居的信息来进行预测和控制决策。这一特性使得系统具备更好的可扩展性和鲁棒性,非常适合多机器人编队这类场景。例如,在一个多机器人执行搜索救援任务的编队中,各机器人只需关注自身周边情况和相邻伙伴信息,就能协同完成复杂的编队动作,即使部分机器人出现故障,整体编队仍有可能继续执行任务。
多智能体协同编队控制,分布式模型预测控制方法实现matlab仿真代码,多机器人协同编队控制。 复现的高水平sci文献。
在多机器人协同编队控制的领域里,分布式模型预测控制方法(Distributed Model Predictive Control,DMPC)凭借其独特优势,成为众多研究者的心头好。最近复现了一篇高水平SCI文献中的相关内容,今天就来和大家分享下用Matlab实现基于该方法的多智能体协同编队控制仿真代码及思路。
一、分布式模型预测控制方法简介
分布式模型预测控制旨在将复杂的全局控制问题分解为多个局部子问题,每个智能体仅依据自身及邻居的信息来进行预测和控制决策。这一特性使得系统具备更好的可扩展性和鲁棒性,非常适合多机器人编队这类场景。例如,在一个多机器人执行搜索救援任务的编队中,各机器人只需关注自身周边情况和相邻伙伴信息,就能协同完成复杂的编队动作,即使部分机器人出现故障,整体编队仍有可能继续执行任务。
二、Matlab仿真代码核心部分及分析
系统建模
首先要对多智能体系统进行建模。假设每个智能体的动力学模型为简单的双积分器模型:
% 定义智能体动力学模型
A = [0 1; 0 0];
B = [0; 1];这里 A 矩阵描述了智能体状态的转移关系,B 矩阵则刻画了控制输入对状态的影响。简单来说,在这个双积分器模型里,智能体的速度变化由控制输入决定,而位置变化又依赖于速度。
预测模型构建
每个智能体需要预测自身未来的状态。以预测时域为 N 为例,预测模型代码片段如下:
% 预测模型构建
N = 10; % 预测时域
F = zeros(2*N, 2);
G = zeros(2*N, N);
for k = 1:N
F(2*(k-1)+1:2*k, :) = A^k;
for i = 1:k
G(2*(k-1)+1:2*k, i) = A^(k - i) * B;
end
end这段代码中,F 矩阵表示从初始状态到未来各时刻状态的映射关系,G 矩阵则描述了各时刻控制输入对未来状态的影响。随着预测时域 N 的增大,智能体对未来状态的预测会更长远,但计算量也会相应增加。
分布式优化问题求解
每个智能体都要解决一个局部优化问题,以确定自身的控制输入。这里使用二次规划(Quadratic Programming,QP)来求解。
% 分布式优化问题求解
H = 2 * G' * G;
f = -2 * G' * (F * x0 - x_ref);
Aeq = [ones(1, N), zeros(1, N)];
beq = 0;
lb = -ones(N, 1) * control_limit;
ub = ones(N, 1) * control_limit;
options = optimoptions('quadprog', 'Display', 'off');
u_opt = quadprog(H, f, [], [], Aeq, beq, lb, ub, [], options);在这段代码中,H 是二次规划目标函数中二次项的系数矩阵,f 是一次项系数向量。Aeq 和 beq 定义了等式约束,lb 和 ub 则是控制输入的上下限。通过 quadprog 函数求解这个二次规划问题,得到最优的控制输入序列 u_opt,从而引导智能体向目标状态运动。
邻居信息交互
在分布式系统中,智能体间的邻居信息交互至关重要。假设我们用图论的方式来描述智能体间的连接关系。
% 邻居信息交互
adjacency_matrix = [0 1 0; 1 0 1; 0 1 0]; % 邻接矩阵示例
num_agents = size(adjacency_matrix, 1);
for i = 1:num_agents
neighbors = find(adjacency_matrix(i, :));
% 这里可以添加向邻居发送自身信息和接收邻居信息的逻辑
% 例如:send_info_to_neighbors(i, neighbors, agent_info{i});
% receive_info_from_neighbors(i, neighbors, received_info{i});
endadjacency_matrix 是邻接矩阵,描述了智能体之间的连接情况。通过 find 函数找出每个智能体的邻居,在实际代码中,可进一步添加信息发送与接收的具体逻辑,确保每个智能体能够获取邻居的必要信息用于控制决策。
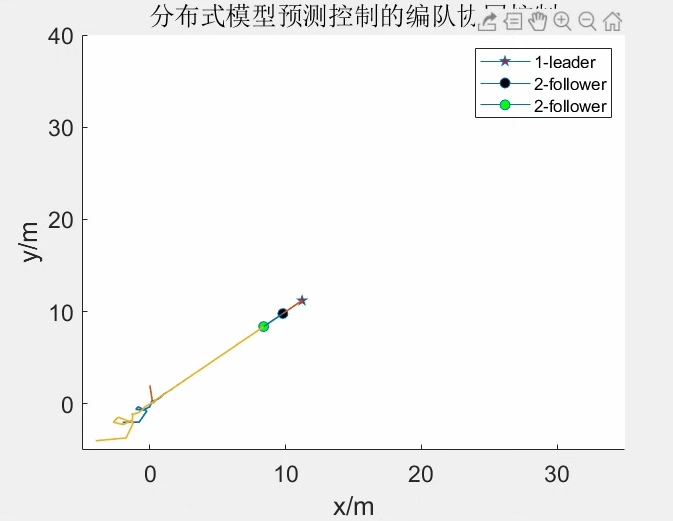
三、仿真结果展示
通过上述代码实现多智能体协同编队控制后,我们可以得到类似如下的仿真结果:智能体们从初始的无序状态,逐渐按照预设的编队模式进行运动,最终稳定保持在编队队形中。在这个过程中,每个智能体依据分布式模型预测控制方法,实时调整自身的控制输入,与邻居协同完成编队任务。
多智能体协同编队控制,分布式模型预测控制方法实现matlab仿真代码,多机器人协同编队控制。 复现的高水平sci文献。
多智能体协同编队控制的分布式模型预测控制方法在Matlab中的实现,虽然过程中有不少细节需要琢磨,但通过一步步构建系统模型、预测模型,求解优化问题以及实现信息交互,我们能够有效地复现高水平SCI文献中的相关成果,为多机器人协同作业等实际应用打下坚实基础。希望这篇博文能给对该领域感兴趣的小伙伴们一些启发,大家一起探索更有趣的多智能体控制方案!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)