并联六自由度微动机器人机构设计
本文摘要:文章详细介绍了工业机器人总体方案设计过程,重点分析了五种机械结构类型(圆柱坐标型、直角坐标型、球坐标型、关节型和平面关节型)的特点及选择依据,最终确定采用关节型方案。具体阐述了工作空间确定(1500mm)、手腕结构设计(实现6自由度)、驱动方案选择(直流伺服电机)以及关键部件(齿轮、夹持器、壳体)的设计要点。其中,壳体采用铸铝材料以减轻重量,手腕电机选用Z型并励直流电动机,并通过传动比计
第3章 总体方案设计
3.1 机械结构类型的确定
为实现总体机构在空间的位置提供的6个自由度,可以有不同的运动组合,根据本课题可以将其设计成以下五种方案[10]:
3.1.1 圆柱坐标型
这种运动形式是通过一个转动,两个移动,共三个自由度组成的运动系统,工作空间图形为圆柱型。它与直角坐标型比较,在相同的工作空间条件下,机体所占体积小,而运动范围大。
3.1.2 直角坐标型
直角坐标型工业机器人,其运动部分由三个相互垂直的直线移动组成,其工作空间图形为长方体。它在各个轴向的移动距离,可在各坐标轴上直接读出,直观性强,易于位置和姿态的编程计算,定位精度高、结构简单,但机体所占空间体积大、灵活性较差。
3.1.3 球坐标型
又称极坐标型,它由两个转动和一个直线移动所组成,即一个回转,一个俯仰和一个伸缩运动组成,其工作空间图形为一个球形,它可以作上下俯仰运动并能够抓取地面上或较低位置的工件,具有结构紧凑、工作空间范围大的特点,但结构复杂。
3.1.4 关节型
关节型又称回转坐标型,这种机器人的手臂与人体上肢类似,其前三个关节都是回转关节,这种机器人一般由立柱和大小臂组成,立柱与大臂间形成肩关节,大臂和小臂间形成肘关节,可使大臂作回转运动和使大臂作俯仰摆动,小臂作俯仰摆动。其特点使工作空间范围大,动作灵活,通用性强、能抓取靠进机座的物体。
3.1.5 平面关节型
采用两个回转关节和一个移动关节;两个回转关节控制前后、左右运动,而移动关节则实现上下运动,其工作空间的轨迹图形,它的纵截面为矩形的同转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体横截面的大小、形状。在水平方向有柔顺性,在垂直方向有较大的刚性。它结构简单,动作灵活,多用于装配作业中,特别适合小规格零件的插接装配。
对以上五种方案进行比较:方案一不能够完全实现本课题所要求的动作;方案二体积大,灵活性差;方案三结构复杂;方案五无法实现本课题的动作。结合本课题综合考虑决定采用方案四:关节型机器人。此方案所占空间少,工作空间范围大,动作灵活,工艺操作精度高[11]。
3.2 工作空间的确定
根据关节型机器人的结构确定工作空间。工作空间是指机器人正常工作运行时,手腕参考点能在空间活动的最大范围,是机器人的主要技术参数。此机器人的工作空间为1500mm,如图3-1所示。
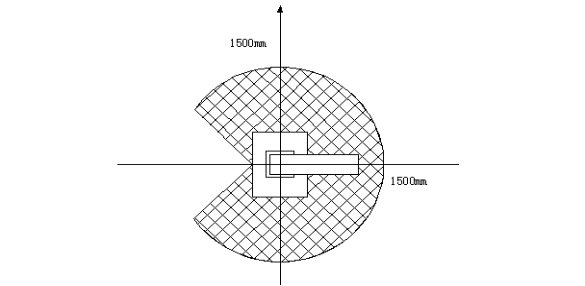
图3-1 机器人的机座坐标系
3.3 手腕结构的确定
手腕是联接手臂和末端执行器的部件,处于机器人操作机的最末端,其功能是在手臂和腰部实现了末端执行器在作业空间的三个坐标位置的基础上,再由手腕来实现末端执行器在作业空间的三个姿态坐标,即实现六个自由度如图3-2所示。
-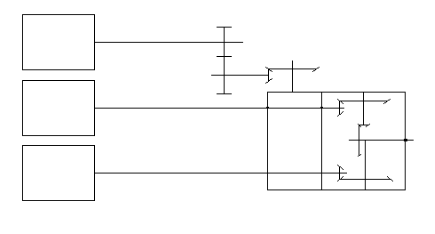
图3-2 传动原理图
考虑到结构,电机将成三角形布置。
第4章 手腕的结构设计与计算
4.1 机器人驱动方案的分析和选择
通常的机器人驱动方式有以下四种[12]:
(1)步进电机:可直接实现数字控制,控制结构简单,控制性能好,而且成本低廉;通常不需要反馈就能对位置和速度进行控制。但是由于采用开环控制,没有误差校正能力,运动精度较差,负载和冲击震动过大时会造成“失步”现象。
(2)直流伺服电机:直流伺服电机具有良好的调速特性,较大的启动力矩,相对功率大及快速响应等特点,并且控制技术成熟。其安装维修方便,成本低。
(3)交流伺服电机:交流伺服电机结构简单,运行可靠,使用维修方便,与步进电机相比价格要贵一些。随着可关断晶闸管GTO,大功率晶闸管GTR和场效应管MOSFET等电力电子器件、脉冲调宽技术(PWM)和计算机控制技术的发展,使交流伺服电机在调速性能方面可以与直流电机媲美。采用16位CPU+32位DSP三环(位置、速度、电流)全数字控制,增量式码盘的反馈可达到很高的精度。三倍过载输出扭矩可以实现很大的启动功率,提供很高的响应速度。
(4)液压伺服马达:液压伺服马达具有较大的功率/体积比,运动比较平稳,定位精度较高,负载能力也比较大,能够抓住重负载而不产生滑动,从体积、重量及要求的驱动功率这几项关键技术考虑,不失为一个合适的选择方案。但是,其费用较高,其液压系统经常出现漏油现象。为避免本系统也出现同类问题,在可能的前提下,本系统将尽量避免使用该种驱动方式。
本次设计的机器人将采用直流伺服电动机。因为它具有体积小、转矩大、输出力矩和电流成比例、伺服性能好、反应快速、功率重量比大,稳定性好等优点。
4.2 手腕电机的选择
4.2.1 提腕电机的选择
手腕的最大负荷重量,初估腕部的重量,最大运动速度v=2m/s
功率p=fv=mgv=8×10×2=160W
取安全系数为1.2,p=1.2×160=192W
考虑到传动损失和摩擦,最终的电机功率。选择Z型并励直流电动机,技术参数如表4-1所示。
4.2.2 摆腕和转腕电机的选择
根据设计要求取相同型号的电机,选择Z型并励直流电动机型号为200/20-400。
表4-1 Z型并励直流电动机技术参数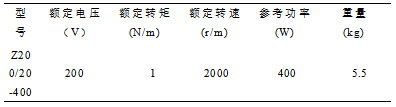
4.3 传动比的确定
4.3.1 提腕总传动比的确定
先根据下式求角速度: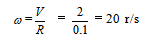
4.5 齿轮的设计
按照上述传动比配对各齿轮进行设计。
4.5.1 提腕部分齿轮设计
1. 第一极圆柱齿轮传动
2. 齿轮设计齿轮采用45号钢,锻造毛坯,正火处理后齿面硬度170~190HBS,齿轮精度等级为7极。取。
(1)设计准则
按齿面接触疲劳强度设计,再按齿根弯曲疲劳强度校核。
(2)按齿面接触疲劳强度设计
齿面接触疲劳强度条件的设计表达式: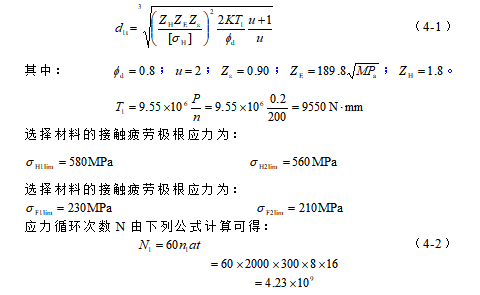
4.7 夹持器的设计
根据焊枪的轴径和机械接口的结构设计了夹持器[20]。本次设计使用的焊枪直径为50mm。用螺栓固定焊枪。通过螺栓与机械接口联接。本实用新型涉及焊枪的夹持装置,是一种焊枪夹持器,其包括定位座、套管、U形套管连接块和U形固定杆连接块;定位座与套管固定连接在一起;在定位座内有定位孔,在定位孔内安装有定位块;在套管内有顶杆,顶杆的中部通过螺纹安装在套管内并能在套管内左右移动,顶杆的内端穿过套管与定位块的外端固定安装在一起并能使定位块在定位孔内移动;U形套管连接块通过套管安装孔套装在套管的外侧。本实用新型结构合理而紧凑,使用方便,通过手轮调节在一根锁紧杆上可调的U形套管连接块和U形固定杆连接块,实现对摆动器或焊接机头和定位座的固定和调整,还通过定位座和定位块配合完成对焊枪的锁紧和调整,因此极大的提高了工作效率。
4.8 壳体的设计
铸造铝合金的密度比铸铁和铸钢小,而比强度则较高。因此在承受同样载荷条件下采用铝合金铸件,可以减轻结构的重量,故在航空工业及动力机械和运输机械制造中,铝合金铸件得到广泛的应用。
铝合金有良好的表面光泽,在大气及淡水中具有良好的耐腐蚀性,故在民用器皿制造中,具有广泛的用途。纯铝在硝酸及醋酸等氧化性酸类介质中具有良好的耐蚀性,因而铝铸件在化学工业中也有一定的用途。纯铝及铝合金有良好的导热性能,放在化工生产中使用的热交换装置,以及动力机械上要求具有良好导热性能的零件,如内燃机的汽缸盖和活塞等,也适于用铝合金来制造[21]。
铝合金具有良好的铸造性能。由于熔点较低(纯铝熔点为660.23度,铝合金的浇注温度一般约在730~750度左右),故能广泛采用金属型及压力铸造等铸造方法,以提高铸件的内在质量,尺寸精度和表面光洁程度以及生产效率。铝合金由于凝固潜热大,在重量相同条件下,铝液的凝固过程时间延续比铸钢和铸铁长得多,放流动性良好,有利于铸造薄壁和结构复杂的铸件。
铝合金按照加工方法的不同分为两大类,即压力加工铝合金和铸造铝合金(分别以YL和ZL表示)。在铸造铝合金中又依主要加入的合金元素的不同而分为四个系列,即铸造铝硅合金、造铝铜合金、铸造铝镁合金和铸造铅锌合金(分别以 ZL1X X,ZL2 X X,ZL3 X X和ZL4 X X表示),在每个系列中又按照化学成分及性能的不同而分为若干牌号。
机座部分采用铸铝材料,方形结构,臂厚8~12mm。机身部分采用铸铝材料,圆筒形结构,臂厚7~8。大臂外壳和大臂箱体采用铸铝材料,方形结构,厚度均为6~8。小臂箱体和小臂外壳采用铸铝材料,结构为方形,侧面为铸件其它三面为铸铝板材。手腕外壳和手腕箱体采用铸铝材料,结构为方形,两侧面、背面、底面为铸件,端面和正面为铸铝板材,臂厚5~8mm。
其它部分具体尺寸由结构决定。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 19
19 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)