焊接机器人设计
本文设计了四自由度直角坐标焊接机器人,采用系统分析和技术设计两阶段完成总体方案。机器人由执行机构(焊枪手部、液压驱动腕部)、驱动机构和控制系统组成,腕部实现单自由度回转,臂部采用伸缩结构。设计着重考虑刚度、惯量、灵活性和精度,通过合理选材(铝合金)、结构优化和液压驱动实现性能要求。对关键部件进行了强度校核,活塞杆满足刚度要求。机身采用回转缸结构支撑臂部运动,整体方案兼顾功能需求和结构紧凑性,适用于
第2章 焊接机器人的总体方案
该设计的目的是为了设计一台焊接机器人,本章主要对焊接机器人的机械结构部分进行设计和分析。
2.1 总体设计的思路
设计机器人大体上可分为两个阶段:
(1) 系统分析阶段
1)根据系统的目标,明确所采用机器人的目的和任务;
2)分析机器人所在系统的工作环境;
3) 根据机器人的工作要求,确定机器人的基本功能和方案。如机器人的自由度、信息的存储量、计算机功能、动作精度的要求、容许的运动范围、以及对温度、震动等环境的适应性。
(2) 技术设计阶段
1)根据系统的要求确定机器人的自由度和允许的空间工作范围,选择机器人的坐标形式;
2)拟订机器人的运动路线和空间作业图;
3)确定驱动系统的类型;
4)选择各部件的具体结构,进行机器人总装图的设计;
5)绘制机器人的零件图,并确定尺寸。
2.2 自由度和坐标系的选择
机器人的运动自由度是指各运动部件在三维空间相当于固定坐标系所具有的独立运动数,对于一个构件来说,它有几个运动坐标就称其有几个自由度。各运动部件自由度的总和为机器人的自由度数。机器人的手部要像人手一样完成各种动作是比较困难的,因为人的手指、掌、腕、臂由19个关节组成,共有27个自由度。而生产实践中不需要机器人的手有这么多的自由度一般为3-6个(不包括手部)。本次设计的焊接机器人为4自由度即:腕部回转;小臂部伸缩;大臂部回转;大臂部伸缩。
工业机器人的结构形式主要有直角坐标结构、圆柱坐标结构、球坐标结构、关节型结构四种。各结构形式及其相应的特点,分别介绍如下:
(1) 直角坐标机器人结构
直角坐标机器人的空间运动是用三个相互垂直的直线运动来实现的,如图2-1(a)所示。由于直线运动易于实现全闭环的位置控制,所以,直角坐标机器人有可能达到很高的位置精度(μm级)。但是,这种直角坐标机器人的运动空间相对机器人的结构尺寸来讲,是比较小的。因此,为了实现一定的运动空间,直角坐标机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。
直角坐标机器人的工作空间为一空间长方体。直角坐标机器人主要用于装配作业及搬运作业,直角坐标机器人有悬臂式,龙门式,天车式三种结构[3]。
(2) 圆柱坐标机器人结构
圆柱坐标机器人的空间运动是用一个回转运动及两个直线运动来实现的,如图2-1(b)。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。
(3) 球坐标机器人结构
球坐标机器人的空间运动是由两个回转运动和一个直线运动来实现的,如图2-1(c)。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作空间是一个类球形的空间[3]。
(4) 关节型机器人结构
关节型机器人的空间运动是由三个回转运动实现的,如图2-1(d)。关节型机器人动作灵活,结构紧凑,占地面积小。相对机器人本体尺寸,其工作空间比较大。此种机器人在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这种类型的机器人。
关节型机器人结构,有水平关节型和垂直关节型两种。
根据要求及在实际生产中的用途,本次设计的焊接机器人采用直角坐标。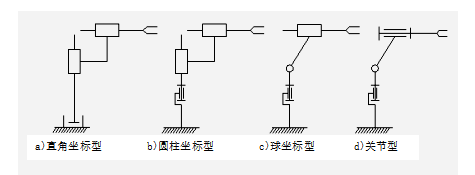
图2-1 四种机器人坐标形式
2.4 焊接机器人的组成
焊接机器人由执行机构、驱动机构和控制机构三部分组成。
2.4.1 执行机构
(1)手部
手部既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于可吸附的,光滑表面的零件或薄板零件)和电磁吸盘。
本设计为焊接机器人设计,因此手部并无其他结构,仅仅是一个焊枪,通过螺栓固定于腕部之上。
(2)腕部
腕部是连接手部和臂部的部件,并可用来调节焊枪的方位,以扩大焊枪的工作范围,并使手部变的更灵巧,适应性更强。手腕有独立的自由度。有回转运动、上下摆动、左右摆动。一般腕部设有回转运动再增加一个上下摆动即可满足工作要求,有些动作较为简单的专用机械手,为了简化结构,可以不设腕部,而直接用臂部运动驱动手部搬运工件。
目前,应用最为广泛的手腕回转运动机构为回转液压缸,它的结构紧凑,灵巧但回转角度小(一般小于2700),并且要求严格密封,否则就难保证稳定的输出扭矩。因此在要求较大回转角的情况下,采用齿条传动或链轮以及轮系结构。本次设计的焊接机器人的腕部是利用液压缸实现手部的旋转运动。
设计的焊接机器人的腕部的运动为一个自由度的回转运动,运动参数是实现手部回转的角度控制在范围内,其基本的结构形式如图2-2所示。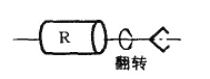
图2-2 腕部回转基本结构示意图
第3章 腕部结构的设计及计算
3.1 腕部设计的基本要求
(1) 力求结构紧凑、重量轻
腕部处于手臂的最前端,它连同手部的静、动载荷均由臂部承担。显然,腕部的结构、重量和动力载荷,直接影响着臂部的结构、重量和运转性能。因此,在腕部设计时,必须力求结构紧凑,重量轻。
(2) 结构考虑,合理布局
腕部作为焊接机器人的执行机构,又承担连接和支撑焊枪的作用,除保证力和运动的要求外,要有足够的强度、刚度外,还应综合考虑,合理布局,解决好腕部与臂部和手部的连接。
(3) 必须考虑工作条件
对于本次设计,焊接机器人的工作条件是在工作场合中焊接工件,最大载荷为8KG,因此不太受环境影响,没有处在高温和腐蚀性的工作介质中,所以对焊接机器人的腕部没有太多不利因素。
3.2 腕部结构及选择
3.2.1 典型的腕部结构
(1) 具有一个自由度的回转驱动的腕部结构它具有结构紧凑、灵活等优点而被广腕部回转,总力矩M,需要克服以下几种阻力:克服启动惯性所用。回转角由动片和静片之间允许回转的角度来决定(一般小于270°)。
(2) 齿条活塞驱动的腕部结构在要求回转角大于270°的情况下,可采用齿条活塞驱动的腕部结构。这种结构外形尺寸较大。
(3) 具有两个自由度的回转驱动的腕部结构它使腕部具有水平和垂直转动的两个自由度。
(4) 机-液结合的腕部结构。
3.2.2 腕部结构和驱动结构的选择
本设计要求手腕回转,综合以上的分析考虑到各种因素,腕部结构选择具有一个自由度的回转驱动腕部结构,采用液压驱动。
3.3 腕部结构设计计算
腕部设计考虑的参数:最大载荷:8KG;回转。
3.3.1 腕部驱动力计算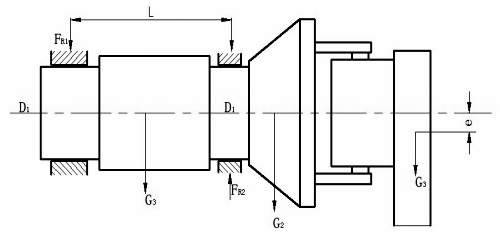
图3-1腕部支撑反力计算示意图
第4章 臂部结构的设计及计算
手臂部件是机械手的主要握持部件。它的作用是支撑腕部和手部(包括工件或工具),并带动它们作空间运动。手臂运动应该包括3个运动:伸缩、回转和升降。本章叙述手臂的伸缩运动,手臂的回转和升降运动设置在机身处,将在下一章祥述。
臂部运动的目的:把手部送到空间运动范围内任意一点。如果改变手部的姿态(方位),则用腕部的自由度加以实现。因此,一般来说臂部应该具备3个自由度才能满足基本要求,既手臂伸缩、左右回转、和升降运动。手臂的各种运动通常用驱动机构和各种传动机构来实现,从臂部的受力情况分析,它在工作中即直接承受腕部、手部、和工件的静、动载荷,而且自身运动较多。因此,它的结构、工作范围、灵活性等直接影响到机械手的工作性能。
4.1 臂部设计的基本要求
臂部设计首先要实现所要求的运动,为此,需要满足下列各项基本要求:
一、臂部应承载能力大、刚度好、自重轻
对于机械手臂部或机身的承载能力,通常取决于其刚度。以臂部为例,一般结构上较多采用悬臂梁形式(水平或垂直悬伸)。显然伸缩臂杆的悬伸长度愈大,则刚度愈差。而且其刚度随着臂杆的伸缩不断变化。对机械手的运动性能、位置精度和负荷能力影响很大。为提高刚度,除尽可能缩短臂杆的悬伸长度外,尚应注意以下几方面:
(1) 根据受力情况,合理选择截面形状和轮廓尺寸;
(2) 提高支撑刚度和合理选择支撑点的距离;
(3) 合理布置作用力的位置和方向;
(4) 注意简化结构;
(5) 提高配合精度。
二、臂部运动速度要高,惯性要小
机械手手部的运动速度是机械手的主要参数之一,它反映机械手的生产水平。对于高速度运动的机械手,其最大移动速度设计在最大回转角速度设计在内,大部分平均移动速度为,平均回转角速度在。在速度和回转角速度一定的情况下,减小自身重量是减小惯性的最有效,最直接的办法,因此,机械手臂部要尽可能的轻。减少惯量具体有4个途径[8]:
(1) 减少手臂运动件的重量,采用铝合金材料;
(2) 减少臂部运动件的轮廓尺寸;
(3) 减少回转半径ρ,再安排机械手动作顺序时,先缩后回转(或先回转后伸缩),尽可能在较小的前伸位置下进行回转动作;
(4) 在驱动系统中设缓冲装置。
三、手臂动作应该灵活
为减少手臂运动之间的摩擦阻力,尽可能用滚动摩擦代替滑动摩擦。对于悬臂式的机械手,其传动件、导向件和定位件布置合理,使手臂运动尽可能平衡,以减少对升降支撑轴线的偏心力矩,特别要防止发生机构卡死(自锁现象)。为此,必须计算使之满足不自锁的条件[9]。
四、位置精度要求高
一般来说,直角和圆柱坐标式机械手位置精度要求较高;关节式机械手的位置精度最难控制,故精度差;在手臂上加设定位装置和检测结构,能较好地控制位置精度,检测装置最好装在最后的运动环节以减少或消除传动、啮合件间的间隙。
总结:除此之外,要求机械手的通用性要好,能适合多种作业的要求;工艺性好,便于加工和安装;用于热加工的机械手,还要考虑隔热、冷却;用于作业区粉尘大的机械手还要设置防尘装置等。
以上要求是相互制约的,应该综合考虑这些问题,只有这样,才能设计出完美的、性能良好的机械手。
4.5活塞杆的计算校核
一、活塞杆强度校核
活塞杆的尺寸要满足活塞(或液压缸)运动的要求和强度要求。对于杆长L大于直径d的15倍以上,按拉、压强度计算:
σ = F/A (4-8)
设计中活塞杆取材料为碳钢,故,活塞直径d=20mm,L=1360mm,现在进行校核:
σ = F/A <[σ]
结论:活塞杆满足强度要求。
二、活塞杆刚度校核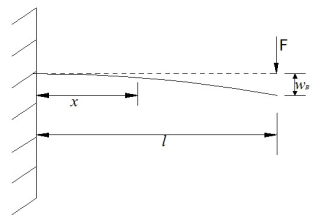
图4-3 刚度校核示意图
第5章 机身结构的设计及计算
机身是直接支撑和驱动手臂的部件。一般实现手臂的回转和升降运动,这些运动的传动机构都安在机身上,或者直接构成机身的躯干与底座相连。因此,臂部的运动越多,机身的机构和受力情况就越复杂。机身是可以固定的,也可以是行走的,既可以沿地面或架空轨道运动。
5.1机身的整体设计
按照设计要求,机械手要实现手臂1800的回转运动,实现手臂的回转运动机构一般设计在机身处。为了设计出合理的运动机构,就要综合考虑分析。
机身承载着手臂,做回转,升降运动,是机械手的重要组成部分。常用的机身结构有以下几种:
(1) 回转缸置于升降之下的结构。这种结构优点是能承受较大偏重力矩。其缺点是回转运动传动路线长,花键轴的变形对回转精度的影响较大。
(2) 回转缸置于升降之上的结构。这种结构采用单缸活塞杆,内部导向,结构紧凑。但回转缸与臂部一起升降,运动部件较大。
(3) 活塞缸和齿条齿轮机构。手臂的回转运动是通过齿条齿轮机构来实现:齿条的往复运动带动与手臂连接的齿轮作往复回转,从而使手臂左右摆动。
分析:经过综合考虑,本设计选用回转缸置于伸缩缸之上的结构。本设计机身包括两个运动,机身的回转和伸缩。回转机构置于升降缸之上的机身结构。手臂部件与回转缸的上端盖连接,回转缸的动片与缸体连接,由缸体带动手臂回转运动。回转缸的转轴与伸缩缸的活塞杆是一体的。具体结构见图5-1。驱动机构是液压驱动,回转缸通过两个油孔,一个进油孔,一个排油孔,分别通向回转叶片的两侧来实现叶片回转。回转角度一般靠机械挡块来决定,对于本设计就是考虑两个叶片之间可以转动的角度,为满足设计要求,设计中动片和静片之间可以回转1800。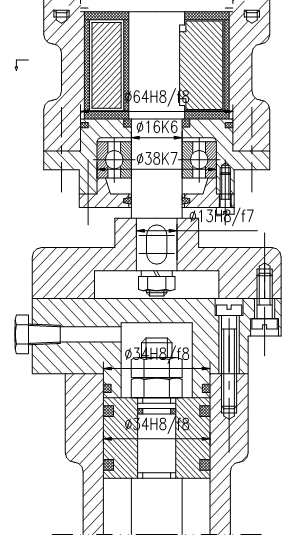
图5-1 回转缸位于伸缩缸之上的机身结构示意图

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)