Science Robotics 首篇里程计: CMU 让机器人遇退化场景 “自动升档”,稳跑不丢轨迹
图中对比了长走廊不同区段中,视觉与 LiDAR 里程计在融合中的相对权重变化,并通过地图着色标注各区域的主导模态:当某一模态在融合中的权重超过 50% 时,即被视为该区域的主要信息源。并采用基于置信度的软融合策略,将 IMU 与 LiDAR 的输出进行平滑组合,从而避免生硬的“硬切换”带来的不连续与不稳定。视觉退化(低光、模糊、遮挡等)、几何退化(长走廊或空旷区域导致约束不足)、混合退化(视觉与几
「从“外感知失明”到“内感知兜底”」
目录
自适应引擎(因子)选择:传感器不是都要用,关键是“该用谁的时候用谁”
过去十多年,机器人感知系统的进步几乎都围绕着一个方向:让机器人“看得更清楚”。
更高分辨率的相机、更密的激光雷达、更复杂的视觉与几何建模。
在大多数环境下,这条路线是成功的。
但当机器人进入真实世界,救援、地下空间、烟雾、黑暗、强反光、玻璃走廊。反复遇到同一个问题:不是机器人看得不够清楚,而是它突然什么都看不见了。
而一旦里程计失效,往往不是“精度差一点”,而是任务中断甚至安全事故。

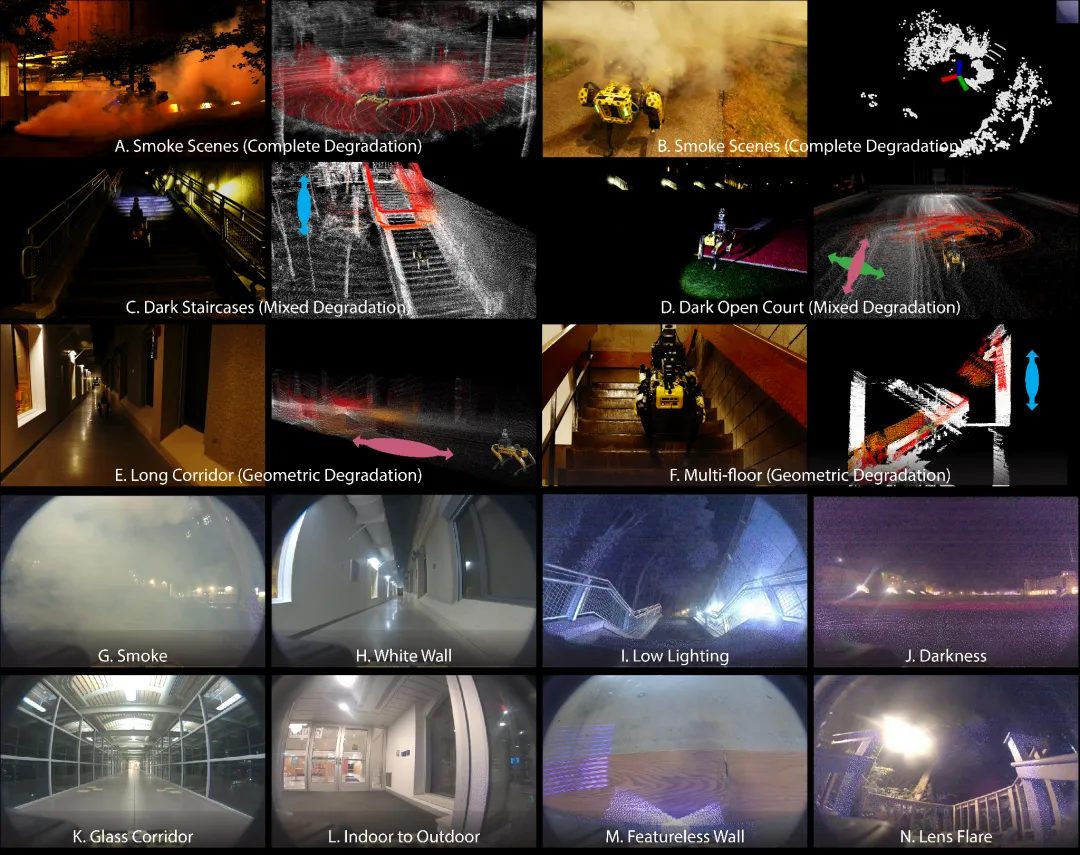
图1|不同程度的退化场景(可见性伴随着烟雾的增加不断下降)
为此,CMU团队提出了Super Odometry。它的核心思路并不是再堆叠一个更重、更复杂的融合系统, 而是让里程计本身学会根据退化程度自动“升档”:
从轻量级的补救策略开始,在环境不断恶化时逐级升级,直至在极端条件下提供可靠的兜底能力,尽可能保证系统始终能够输出可用的位姿估计。
在系统设计上,Super Odometry 采用分层结构,整合了四个关键模块:自适应特征选择、自适应状态方向选择、自适应引擎(因子)选择,以及学习式 IMU 里程计。其中一个重要理念是,将 IMU 提升到与相机和 LiDAR 同等重要的位置——不再只是辅助传感器,而是作为外感知失效时,系统能够依赖的可靠后备感知源。
01 一套会根据环境“自己升档”的里程计
这套系统首先对环境退化进行了清晰的分层划分,覆盖机器人在真实场景中最常遇到的几类困难工况:
视觉退化(低光、模糊、遮挡等)、几何退化(长走廊或空旷区域导致约束不足)、混合退化(视觉与几何线索间歇性同时变差),以及最极端的 完全退化(例如浓烟环境中,视觉与 LiDAR 同时失效, 见图 1)。

图2|视觉退化与几何退化的场景
系统的运行方式,很像一辆会根据路况自动换挡的车:
- 起步阶段,系统仅启用自适应特征选择,优先剔除明显不可靠的观测,用最低的计算成本稳住前端跟踪。
- 当进入几何信息贫乏的长走廊等场景时,系统会启动自适应状态方向选择,主动识别“哪一条位姿方向最虚”(即最不可观),并在这些脆弱方向上引入更可信的先验来补足约束。
- 如果视觉和几何线索开始同时变差,系统进一步进入自适应引擎(因子)选择阶段,动态决 定哪些传感器因子应该参与优化,哪些需要暂时退出,避免错误信息持续放大。
- 最后,在浓烟等外感知几乎全部失效的极端情况下,系统将状态估计的主导权直接交给学 习式 IMU 里程计,由内感知兜底,保证轨迹能够持续输出。
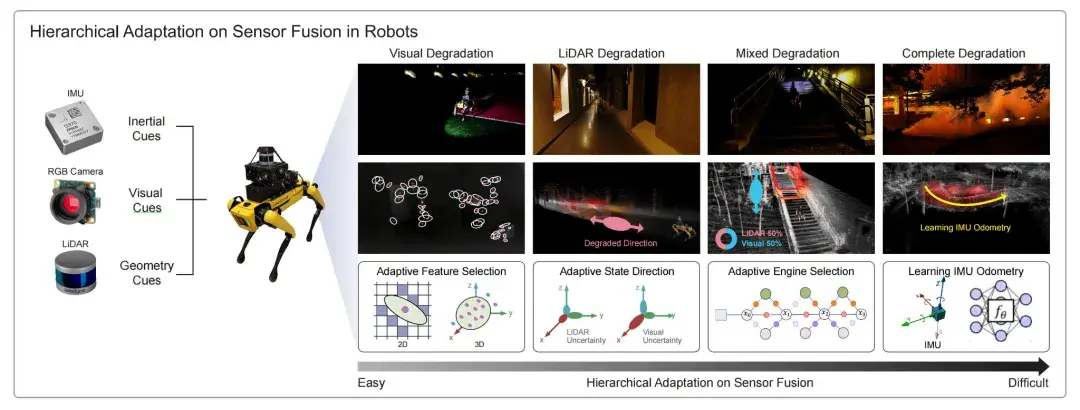
图3|机器人传感器融合中的“分层自适应”示意。系统会根据环境退化程度逐级升级感知与估计策略:在视觉退化阶段,首先启用自适应特征选择,优先过滤不可靠的视觉观测;当 LiDAR 退化或几何约束不足 时,进一步激活自适应状态方向选择,识别并补强最脆弱的位姿方向;在视觉与几 何同时退化的混合场景中,通过自适应因子(引擎)选择,动态决定哪些传感器因子应参与优化;而在完全退化条件下,则由学习式 IMU 里程计接管,作为兜底持续提供位姿估计。
02 技术亮点
分层自适应:不是“更强融合”,而是“按需融合”
这套系统把环境退化分成四类:视觉退化(低光、模糊等)、几何退化(长走廊/空旷区域导致约束不足)、混合退化(视觉与几何约束间歇性一起变差)、完全退化(比如浓烟里视觉和 LiDAR 都完全失效)。

图4|视觉退化与几何退化的场景
因此Super Odometry设计了一套“按需升档”的分层机制:
- 第一档:自适应特征选择(轻量快速,先过滤不可靠观测,常用在轻度退化)
- 第二档:自适应状态方向选择(识别位姿退化方向并提供额外约束补强,常用在中度退化)
- 第三档:自适应因子/引擎选择(动态决定哪些传感器因子参与优化,常用在严重退化)
- 第四档:学习式 IMU 里程计兜底(外感知“失明”也能持续输出位姿,常用在极端退化)
自适应引擎(因子)选择:传感器不是都要用,关键是“该用谁的时候用谁”
他们将因子图设计为可动态重构的结构:系统会持续评估各类因子的质量,一旦发现某类传感器
观测失效或贡献显著下降,就会主动将对应因子从优化中移除。例如在持续黑暗环境下,视觉信息会在短时间内迅速退化,系统随即降低甚至剔除视觉因子,转而更多依赖 LiDAR;反过来,当 LiDAR 因可观性不足而变得不可靠时,系统也会做出对称调整。由此,融合不再是死板的“固定配方”,而更像一个具备自诊断能力、能随环境动态调节结构与权重的智能配比器。
一个更直观的例子来自几何退化的长走廊实验:论文构造了一段“完全黑、结构贫乏、墙面强反光”的走廊路线,车辆不仅完成了 668m 的连续运行,还采用了相当激进的速度策略——大部分路段维持在 4m/s,最高达到 5m/s。在这类场景中,传统 LiDAR 配准往往会在前进方向上失去约束,而他们通过自适应状态方向选择去“盯住最弱的那一轴”,从而避免系统在退化方向上持续漂移, 最终滑向崩溃。
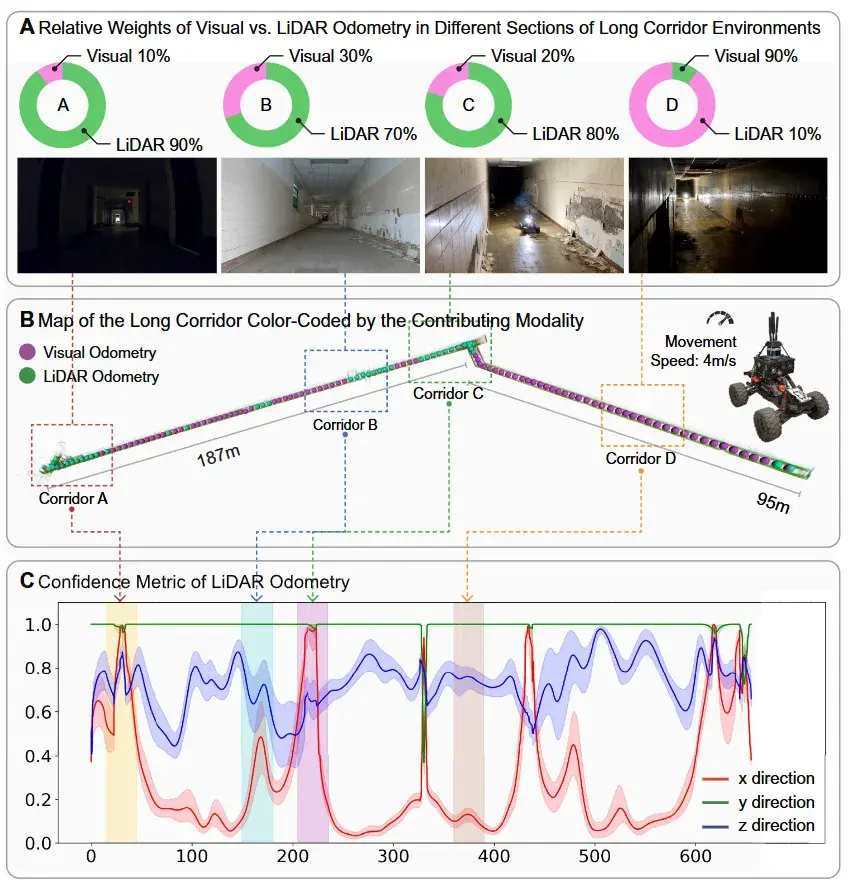
图5|长走廊场景下“自适应状态方向选择”的效果。图中对比了长走廊不同区段中,视觉与 LiDAR 里程计在融合中的相对权重变化,并通过地图着色标注各区域的主导模态:当某一模态在融合中的权重超过 50% 时,即被视为该区域的主要信息源。同时,图中还给出了 LiDAR 里程计在 668 m 路段上的置信度指标,以及在退化方向上视觉与 LiDAR 的相对置信度变化。结果表明,该方法能够在几何退化显著的走廊环境中,更可靠地获得扫描配准与位姿约束。
学习式 IMU 里程计:给机器人一套“内感知”的运动直觉
作者的态度非常明确:IMU 不该只是预积分里的配角,它完全可以像相机和 LiDAR 一样独立贡献状态估计,甚至在外部感知失效时顶上去成为主力。
为此,他们训练了一个跨平台的学习式 IMU 里程计:数据覆盖轮式、腿式、无人机、手持设备等多种载体,总时长超过 100 小时;并通过统一坐标轴定义、重采样至 200 Hz 等处理,尽可能降低跨来源差异。某种意义上,这相当于把“不同机器人如何运动”的动力学规律,压缩进一个可泛化的通 用模型中。
在训练与融合机制上,作者提出了一个闭环的双层架构:下层的传统因子图像“老师”,为 IMU 网络提供近似免费的位姿监督;上层的 IMU 网络像“学生”,在学习到运动模式后,再将运动先验反哺给因子图优化,从而形成一个持续互相纠错、共同提升的闭环系统。
更关键的是,这套在线适配速度非常快:论文给出示例,仅用 45 秒数据,就能将预训练的 IMU 模型快速迁移并适配到新的车辆平台上。
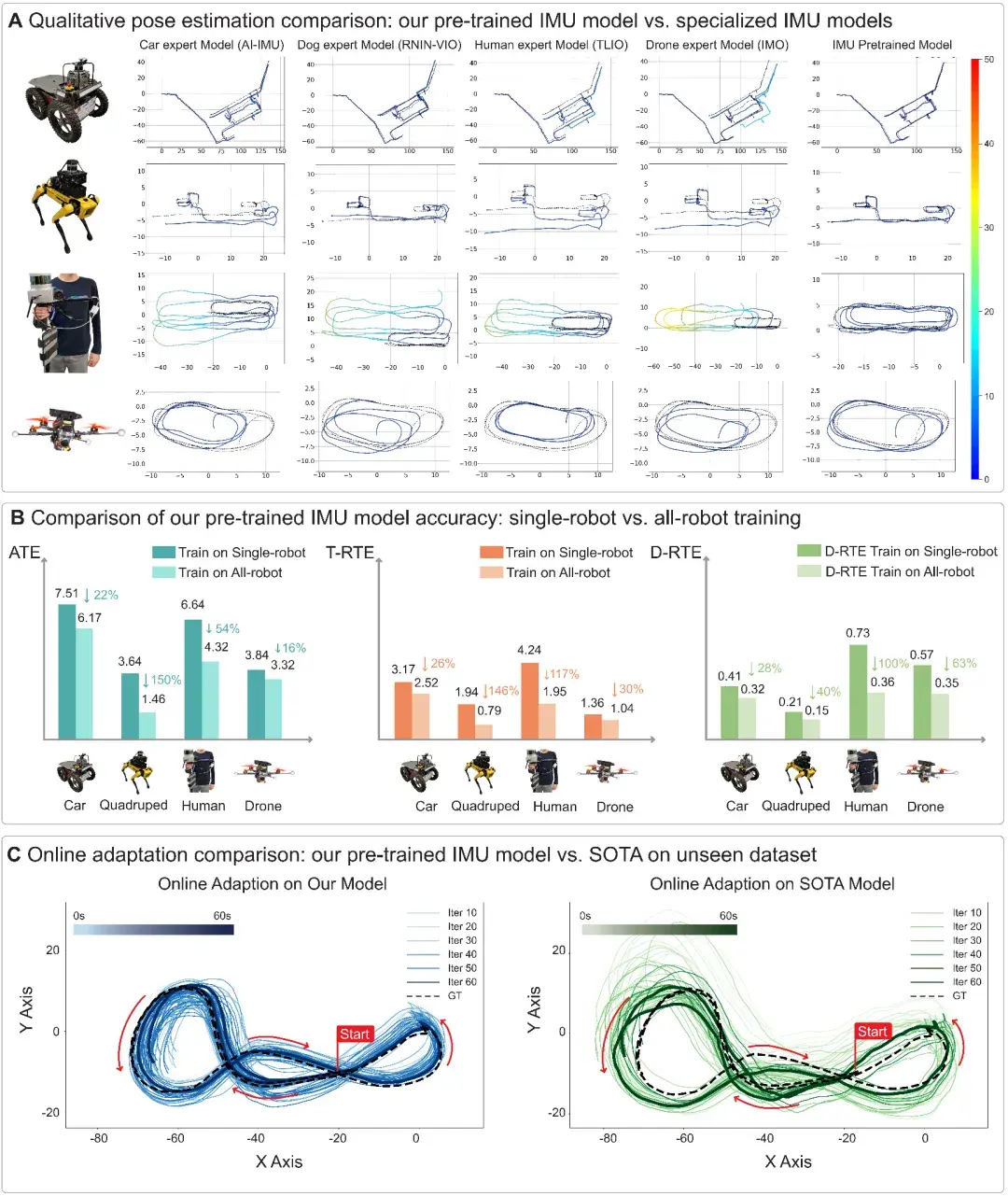
图6|学习式惯性里程计(IMU odometry)的评估结果。定性对比显示,作者的方法在轨迹上最接近真实位姿;同时实验表明,使用多机器人数据进行预训练,比只用单一机器人数据更能显著提升精度;在未见过的新数据集上进行在线自适应时,该方法也能持续优于已有方法
03 实验与表现
这篇文章最“有画面感”的实验,是一次几乎把主流 SLAM 失败模式都“集齐”的实地长距离长时间挑战:
我们在 CMU 校园完成了一条 2966 m、约 46 分钟的连续路线,沿途连续穿越 13+ 种退化场景,涵盖长走廊、楼梯、多楼层、室内外切换,以及烟雾、低光/黑暗、玻璃走廊、强眩光等极端条件。
即便在这种高风险组合下,系统的实时状态估计全程无失败,最终端点漂移仅 0.2 m,并且是在没有回环优化的前提下实现的。
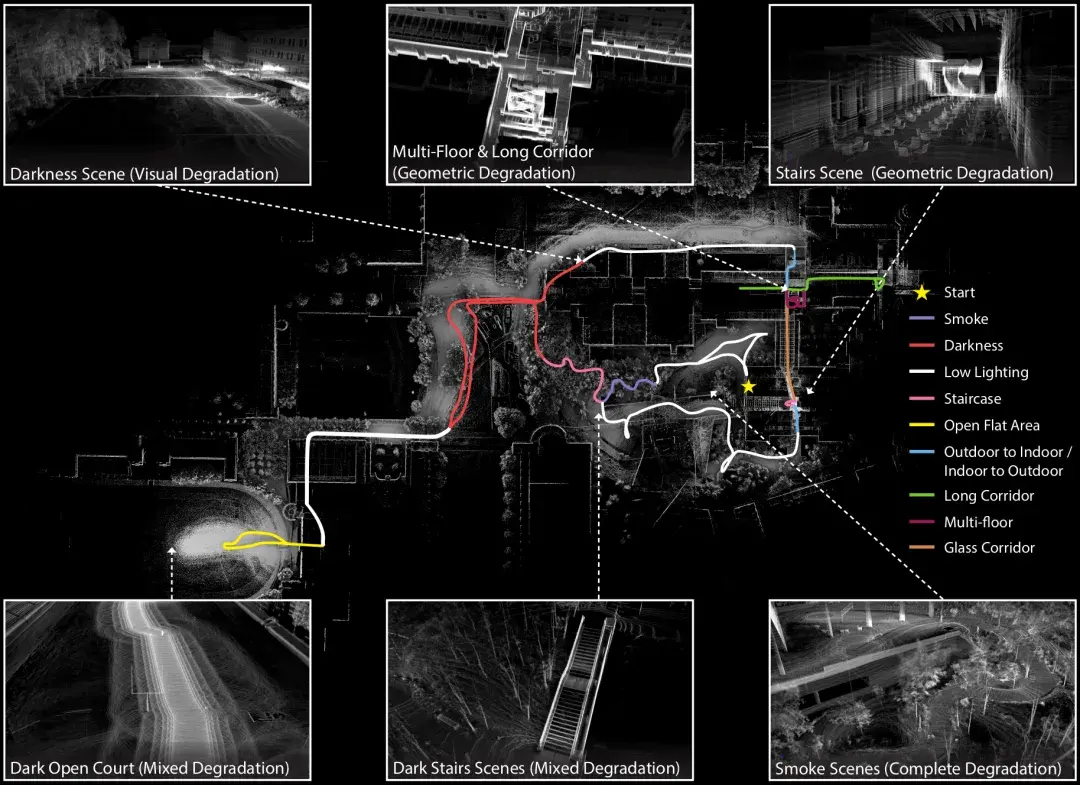
图7|一次运行覆盖 13+ 种退化场景的评估结果。 图中以不同颜色标注的轨迹展示了一台腿式机器人在多种复杂退化条件下的里程计估计过程。尽管沿途连续经历多种不利环境与退化切换,系统在完成 2966 m 路程后仍将终点漂移控制在 20 cm 以内,体现了该方法在长距离、长时间、多退化连续切换场景中的稳定性与鲁棒性。
如果用一句话概括这种趋势:它不是靠某一个传感器去“硬扛”,而是通过分层自适应机制持续调整策略,逐步规避并化解每一个潜在失败点。
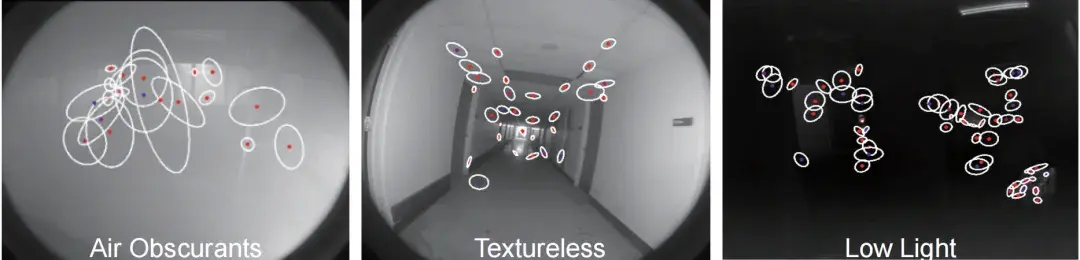
图8|视觉退化条件下的鲁棒特征选择示意。在低光、低纹理与遮挡等恶劣视觉条件下,图中以椭圆表示二维特征点的定位不确定性:椭圆越大,说明该特征越不可靠;椭圆的朝向则刻画了特征在某一二维方向上更易产生跟踪歧义。通过显式估计并利用这些不确定性信息,系统能够优先保留更可信的特征观测,从而在视觉退化时提升前端跟踪的稳定性与鲁棒性。
在“完全退化”的浓烟场景中,论文展示了另一种关键趋势:
当车辆进入浓烟,或在开阔平坦区域因几何可观性不足导致 LiDAR 变得不可靠时,系统会自动将估计重心转交给学习式 IMU 里程计;而当环境条件恢复后,又会以置信度驱动的平滑方式逐步切回 LiDAR,而非生硬的“开/关式”切换。
这个过程恰好呼应了作者的核心定位:IMU 不再只是辅助项,而是可随时接管的安全后备 ——一旦外感知失灵,机器人至少仍能维持可用、连续的运动估计。
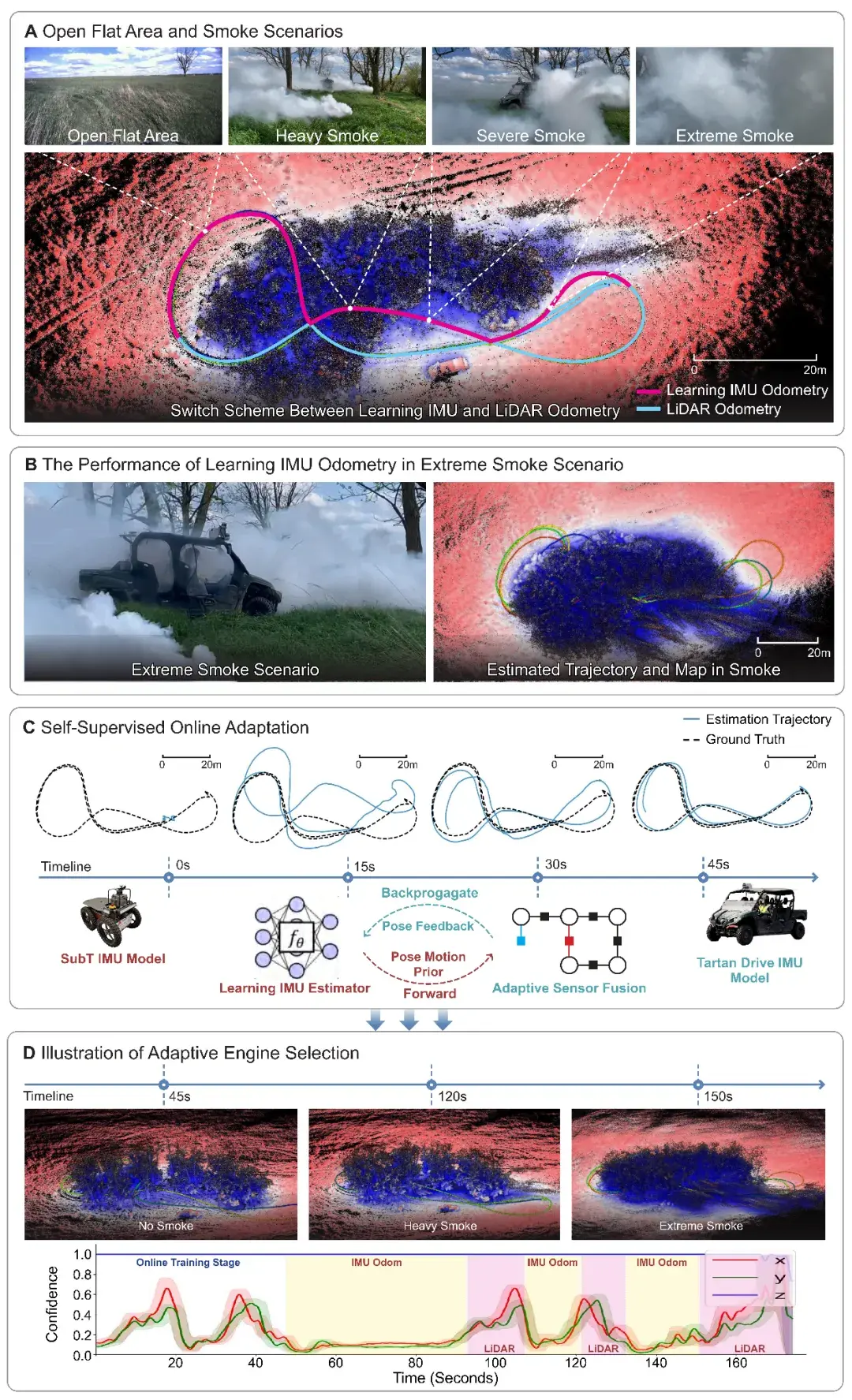
图9|图中展示了系统在极端环境中,如何在学习式 IMU 里程计与 LiDAR 里程计之间进行自适应引擎选择:在重度烟雾导致外感知显著退化时,系统能够依靠学习式 IMU 里程计持续生成稳定的轨迹与地图。同时,系统引入自监督在线适配机制,使 IMU 模型可从一个平台快速迁移到另一个平台;并采用基于置信度的软融合策略,将 IMU 与 LiDAR 的输出进行平滑组合,从而避免生硬的“硬切换”带来的不连续与不稳定。
04 总结
这篇工作的直观感受是:在退化环境里,里程计想要“更可靠”,关键不只是堆传感器,而是需要一套内感知优先、能自适应的策略体系。
所谓“内感知优先”,核心价值并不是更准,而是更“稳”:
1)连续性:不突然断供
IMU 的信息流始终存在。即使世界变成一团雾,你仍然能获得稳定的运动约束,不会瞬间失明。
2)可控性:误差可预测、可监控
IMU 会漂,但漂移往往是渐进的、可建模的、可监控的。系统可以“知道自己不确定”,从而主动降级,而不是盲跑到崩溃。
3)安全性:天然适合作为兜底层
在救援、地下、矿井、灾害等场景,目标往往不是“跑得最准”,而是:
别死、别撞、别丢、别迷路到回不来。
Super Odometry 用分层自适应把从“轻量筛选”到“极端兜底”的响应串成一条梯子,并将 IMU 作为真正的内感知支柱;再通过自监督在线适配,实现“越跑越懂你”的持续增强。与此同时,论文也坦诚当前性能仍依赖较准的标定与时间同步——如果未来能把在线标定与同步纳入自适应闭环,将更接近“随便上车就能跑”的长期自治。
论文出处:Science Robotics 2025
论文标题:Resilient odometry via hierarchical adaptation
论文作者:Shibo Zhao, Sifan Zhou, Yuchen Zhang, Ji Zhang, Chen Wang, Wenshan Wang, Sebastian Scherer
作者单位:Carnegie Mellon University, Buffalo University
项目链接:https://superodometry.com/

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 16
16 0
0- 0



 已为社区贡献87条内容
已为社区贡献87条内容

所有评论(0)