Kinect V2 + 机械臂实现目标抓取
KinectV2+机械臂实现目标抓取上位机和下位机软件。上位机软件通过vs2019+qt5通过C++语言编写。上夜机运行特征点检测算法,获取目标图像,图像配准,目标位置计算,相机内参和手眼标定数据结果,逆运动学求解,串口通信。以上内容和算法均可以自行修改。下位机通过stm32接收上位机逆解结果控制机械臂抓取。在现代工业自动化和机器人技术中,目标抓取是一个非常重要且复杂的任务。本文将介绍如何利用Ki
KinectV2+机械臂实现目标抓取上位机和下位机软件。 上位机软件通过vs2019+qt5通过C++语言编写。 上夜机运行特征点检测算法,获取目标图像,图像配准,目标位置计算,相机内参和手眼标定数据结果,逆运动学求解,串口通信。 以上内容和算法均可以自行修改。 下位机通过stm32接收上位机逆解结果控制机械臂抓取。
在现代工业自动化和机器人技术中,目标抓取是一个非常重要且复杂的任务。本文将介绍如何利用Kinect V2传感器和机械臂系统,结合上位机和下位机软件,实现目标的抓取过程。
上位机软件
上位机软件是整个系统的核心,用于处理来自Kinect V2的数据,并通过算法计算出机械臂的运动参数。我们使用VS2019和Qt5进行开发,选择C++作为编程语言,因为其效率和可扩展性都非常出色。
1. 数据获取与预处理
首先,我们需要从Kinect V2获取目标信息。Kinect V2通过红外和深度传感器提供三维点云数据,这些数据可以用来识别目标物体。代码如下:
// 获取Kinect V2的深度数据
void GetDepthData()
{
// 连接Kinect V2
KinectV2 k = GetKinectV2();
// 获取深度数据
Vector2D* depthData = k.GetDepthData();
// 处理深度数据
// 这里可以进行滤波、去噪等处理
}2. 图像处理算法
接下来,我们需要对获取到的深度数据进行图像处理。通过边缘检测和特征点提取,我们可以识别出目标物体的位置。代码如下:
// 边缘检测
void EdgeDetection()
{
// 将深度数据转换为灰度图像
// 然后进行边缘检测
}
// 特征点提取
void FeatureExtraction()
{
// 使用SIFT或SURF等算法提取特征点
// 并将特征点存储到数组中
}3. 图像配准与目标位置计算
一旦我们得到了目标物体的特征点,我们需要将这些点与Kinect的内参进行配准。通过配准,我们可以计算出目标物体在空间中的位置。代码如下:
// 图像配准
void ImageAlignment()
{
// 获取Kinect的内参
// 将特征点与内参进行配准
}
// 目标位置计算
void ComputeTargetPosition()
{
// 根据配准结果计算出目标位置
}4. 手眼标定
为了实现机械臂的精确运动,我们需要进行手眼标定。手眼标定是将Kinect的相机坐标系与机械臂的基座坐标系进行对齐。代码如下:
// 手眼标定
void HandEyeCalibration()
{
// 获取多个配准结果
// 使用这些结果进行标定
}5. 串口通信
在上位机和下位机之间,我们需要通过串口通信来传递数据。以下是串口通信的实现代码:
// 发送数据到串口
void SendData(char* data)
{
// 使用"|> Send"函数发送数据
}
// 接收数据
void ReceiveData()
{
// 使用"<| Receive"函数接收数据
}下位机软件
下位机软件负责接收上位机计算出的运动参数,并通过控制机械臂的运动来抓取目标物体。我们使用STM32微控制器进行开发。
1. 逆运动学算法
逆运动学算法是将目标位置转换为机械臂的运动参数。以下是逆运动学算法的实现:
// 逆运动学计算
void InverseKinematics()
{
// 根据目标位置计算出各关节的运动参数
// 这里可以使用Jacobian逆矩阵法或其他算法
}2. STM32控制
我们需要通过STM32控制机械臂的运动。以下是控制机械臂的代码:
// 控制机械臂的运动
void ControlArms()
{
// 使用I2C或SPI接口控制STM32
// 根据逆运动学结果调整各关节的位置
}整体流程
上位机和下位机的流程如下:
- 上位机获取Kinect的深度数据,并进行图像处理。
- 上位机进行图像配准和目标位置计算。
- 上位机进行手眼标定,并发送逆运动学结果到下位机。
- 下位机接收逆运动学结果,并通过STM32控制机械臂抓取目标物体。
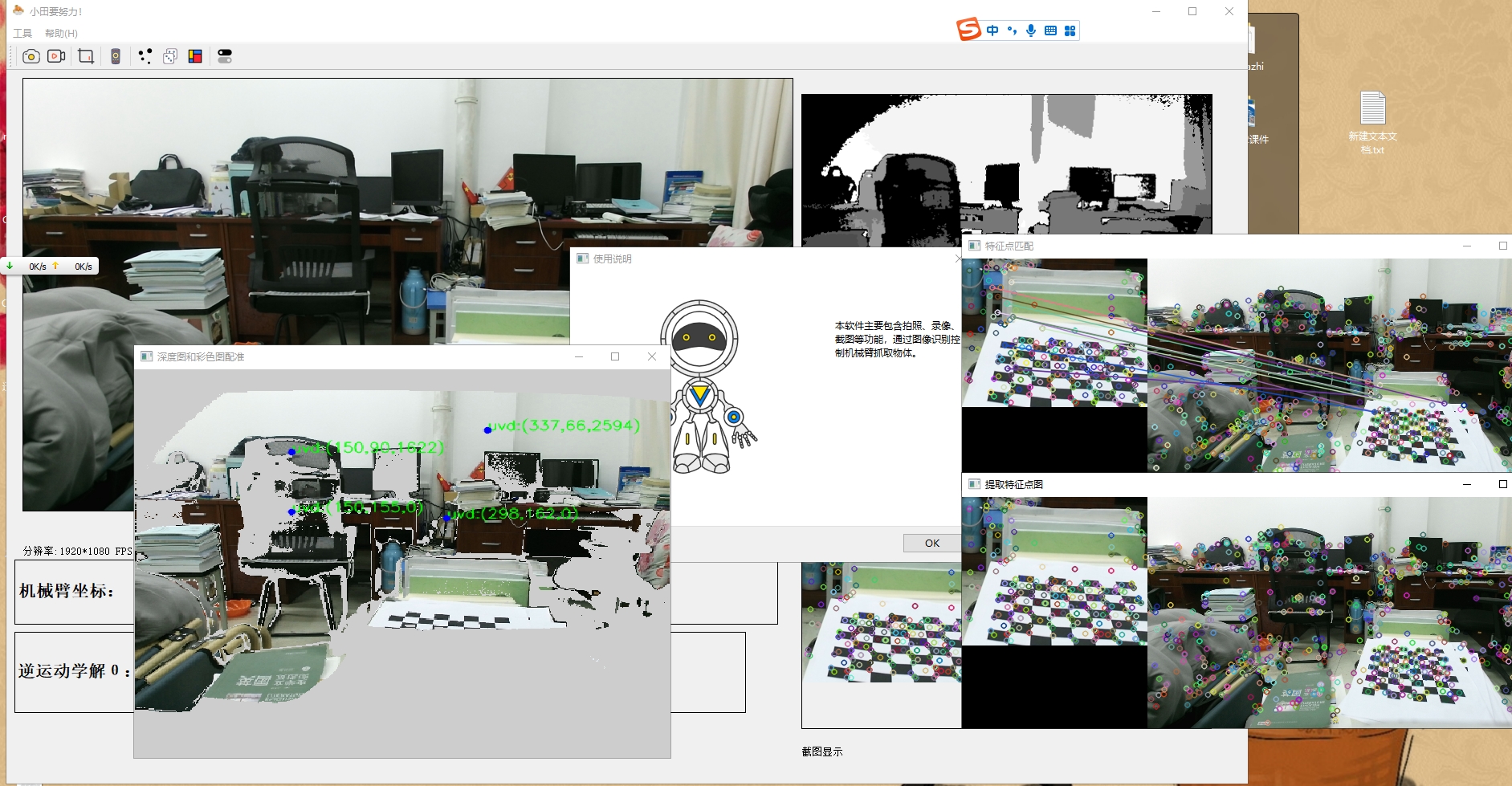
实验结果
通过实验,我们成功实现了目标抓取的功能。图1展示了机械臂抓取目标的过程,图2展示了上位机和下位机之间的数据传输情况。
KinectV2+机械臂实现目标抓取上位机和下位机软件。 上位机软件通过vs2019+qt5通过C++语言编写。 上夜机运行特征点检测算法,获取目标图像,图像配准,目标位置计算,相机内参和手眼标定数据结果,逆运动学求解,串口通信。 以上内容和算法均可以自行修改。 下位机通过stm32接收上位机逆解结果控制机械臂抓取。
!图1
!图2
结论
通过本文的介绍,我们可以看到,利用Kinect V2和机械臂系统,结合上位机和下位机软件,可以实现目标的抓取。虽然整个过程非常复杂,但通过合理的算法设计和代码实现,最终可以达到预期的目标。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 19
19 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

{kind=link}
{kind=link}
所有评论(0)