西门子PLC1200 项目实战:多设备协同控制解决方案
本项目旨在构建一个自动化系统,涉及西门子 PLC1200 与库卡机器人通过 Profinet 通讯,同时运用 PTO 模式精准控制松下伺服,并且处理总计 36 路模拟量,包括压力检测、位置检测及压力输出,还连接 26 个温控器通过 485 总线进行通讯。人机交互界面采用昆仑通态触摸屏,方便操作人员对设备进行监控与操作。
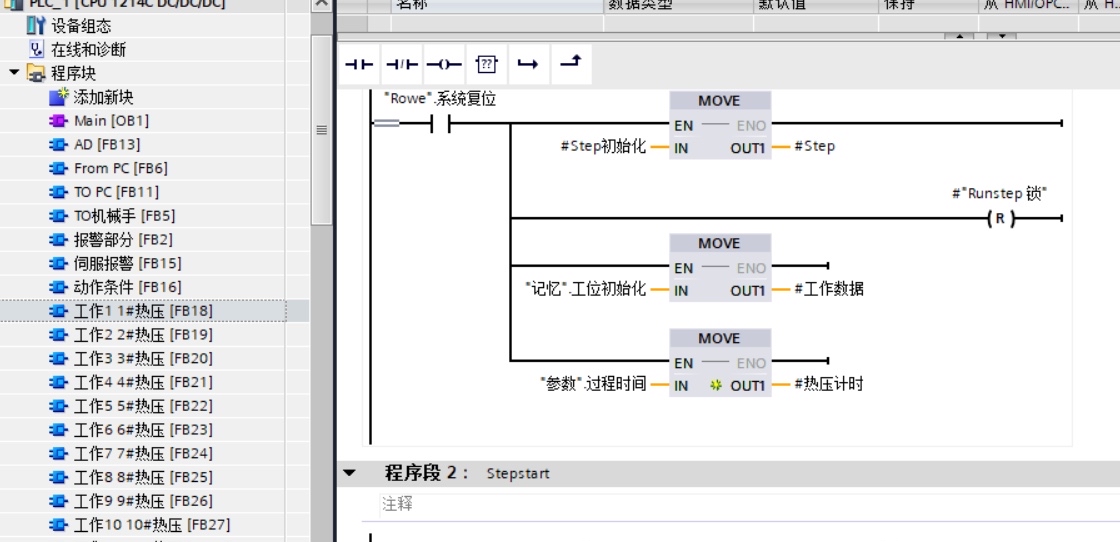
西门子PLC1200伺服库卡机器人12工位博图程序例程,组态采用昆仑通态触摸屏,详细中文注释,PDF电路图参考,设备操作说明,物料BOM ,PLC和一台库卡机器人profinet通讯 PTO模式控制松下伺服 一共36路模拟量 12路模拟量压力检测 12路模拟量位置检测 12路模拟量压力输出 连接26个温控器485总线通讯
在自动化控制领域,将多种设备进行高效整合与协同控制是常见且富有挑战性的任务。今天就来分享一个基于西门子 PLC1200 的综合性项目,涵盖伺服控制、机器人通讯、模拟量处理以及温控器通讯等关键环节。
一、项目概述
本项目旨在构建一个自动化系统,涉及西门子 PLC1200 与库卡机器人通过 Profinet 通讯,同时运用 PTO 模式精准控制松下伺服,并且处理总计 36 路模拟量,包括压力检测、位置检测及压力输出,还连接 26 个温控器通过 485 总线进行通讯。人机交互界面采用昆仑通态触摸屏,方便操作人员对设备进行监控与操作。
二、硬件组态
(一)PLC 与机器人通讯
西门子 PLC1200 与库卡机器人进行 Profinet 通讯时,在博图软件中,首先要在硬件目录找到 PLC1200 对应的型号进行添加,配置其 IP 地址。
// 示例 PLC 硬件配置部分代码片段(非实际可运行代码,仅示意)
<PLC_Configuration>
<PLC_Type>Siemens S7 - 1200</PLC_Type>
<IP_Address>192.168.0.1</IP_Address>
</PLC_Configuration>对于库卡机器人,同样要设置其 Profinet 相关参数,确保与 PLC 的 IP 在同一网段。通过这种方式,实现两者的网络连接基础,为后续数据交互做准备。
(二)模拟量模块连接
36 路模拟量涉及多种功能,对于 12 路模拟量压力检测、12 路模拟量位置检测及 12 路模拟量压力输出,需要选择合适的模拟量输入/输出模块。以西门子模拟量模块为例,在硬件组态中添加相应模块,并注意通道地址的分配。
// 模拟量模块配置示意
<Analog_Module_Configuration>
<Module_Type>SM1231 AI 8x13bit</Module_Type> // 假设用于压力和位置检测输入
<Channel_Addresses>
<Address>0</Address> // 通道 0 对应第一个压力或位置检测
<Address>2</Address> // 通道 2 对应第二个检测,依此类推
</Channel_Addresses>
</Analog_Module_Configuration>(三)温控器通讯
连接 26 个温控器通过 485 总线通讯,需要在 PLC 侧添加合适的 485 通讯模块,如 CM1241 RS485。对每个温控器设置不同的地址,以便 PLC 能够准确寻址进行数据读写。
三、软件编程
(一)PTO 模式控制松下伺服
在博图软件中,使用 S7 - 1200 的运动控制指令来实现 PTO 模式控制松下伺服。首先要定义轴对象,设置其参数,比如速度、加速度等。
// 定义轴对象及参数设置
AXIS1 := 'Axis_1';
AXIS1.PositiveLimit := 1000.0; // 正向极限位置
AXIS1.NegativeLimit := 0.0; // 负向极限位置
AXIS1.Velocity := 500.0; // 速度设置
AXIS1.Acceleration := 2000.0; // 加速度设置然后通过 MC_MoveAbsolute 等指令来控制轴的运动。例如,要将轴移动到绝对位置 500:
MC_MoveAbsolute(
Axis := AXIS1,
Position := 500.0,
Velocity := AXIS1.Velocity,
OverV := 100,
OverAcc := 100,
OverDec := 100,
CancelTraversing := FALSE,
Interrupt := FALSE);(二)模拟量处理
对于 12 路模拟量压力检测和 12 路模拟量位置检测,读取模拟量模块的数据并进行处理。以压力检测为例,假设模拟量值在 0 - 27648 对应 0 - 100 bar 的压力范围。
// 读取模拟量通道 0 的压力值并转换
L PIW 0 // 读取模拟量通道 0 的原始值
ITD // 整数转双整数
DTR // 双整数转浮点数
L 100.0 // 满量程压力值
/ // 计算实际压力值
T "Pressure_Value_0" // 存储压力值到变量对于 12 路模拟量压力输出,根据控制需求将处理后的数据写入模拟量输出模块。
(三)温控器通讯
使用 Modbus RTU 协议库来实现 PLC 与 26 个温控器的通讯。首先初始化通讯模块,设置波特率、奇偶校验等参数。
// Modbus RTU 通讯初始化
MB_COMM_LOAD(
COMM_PORT := 1, // 假设 CM1241 RS485 对应端口 1
BAUD := 9600,
PARITY := 'E', // 偶校验
RTS_ON := 10,
RTS_OFF := 10,
DONE => "MB_Comm_Load_Done",
ERROR => "MB_Comm_Load_Error");然后通过 MB_MASTER 指令来读写温控器的数据,如读取温控器地址为 1 的温度值。
MB_MASTER(
REQ := "Read_Temp_Req", // 读取请求信号
MB_ADDR := 1, // 温控器地址 1
MODE := 0, // 读操作
DATA_ADDR := 40001, // 假设温度值寄存器地址
DATA_LEN := 2, // 数据长度
DATA_PTR := P#"Temp_Value_1".BYTE 0, // 存储温度值的变量指针
DONE => "Read_Temp_Done",
ERROR => "Read_Temp_Error",
STATUS => "Read_Temp_Status");四、人机交互 - 昆仑通态触摸屏组态
在昆仑通态触摸屏软件中,创建与 PLC 对应的变量连接,通过图形化界面展示设备运行状态,如各模拟量数值、伺服轴位置、温控器温度等。同时设置操作按钮,方便操作人员对设备进行启停、参数调整等操作。
五、物料 BOM
- 西门子 PLC1200 及相关模块:CPU 模块、模拟量输入/输出模块、485 通讯模块等。
- 松下伺服驱动器及电机:根据实际负载和运动要求选型。
- 库卡机器人:具体型号根据工艺需求确定。
- 昆仑通态触摸屏:合适尺寸及分辨率的触摸屏。
- 其他:通讯电缆、电源模块、端子排等。
六、设备操作说明
- 开机步骤:依次打开各设备电源,等待设备自检完成。
- 参数设置:在触摸屏上进入参数设置界面,设置伺服参数、温控器参数等。
- 运行操作:点击启动按钮,设备按照预设程序运行,操作人员可在触摸屏实时监控运行状态。
- 关机步骤:先停止设备运行,再关闭各设备电源。
本项目通过对西门子 PLC1200 的灵活运用,成功实现了多设备的协同控制,希望这些内容能为大家在类似项目开发中提供有益的参考。同时,文中提供的 PDF 电路图参考可帮助大家更好地理解硬件连接细节。

西门子PLC1200伺服库卡机器人12工位博图程序例程,组态采用昆仑通态触摸屏,详细中文注释,PDF电路图参考,设备操作说明,物料BOM ,PLC和一台库卡机器人profinet通讯 PTO模式控制松下伺服 一共36路模拟量 12路模拟量压力检测 12路模拟量位置检测 12路模拟量压力输出 连接26个温控器485总线通讯

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 21
21 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)