面向内镜手术的绳驱连续体机器人的自适应滑模轨迹跟踪与抗干扰控制策略
山东大学研究团队发表面向绳驱动连续体机器人的融合非线性扩展状态观测器的自适应滑模跟踪控制方法,度量动捕为实验提供机器人末端执行器位姿数据,助力验证控制方法有效性。
导语|绳驱动连续体机器人轨迹跟踪研究的实验验证需求
绳驱动连续体机器人(Cable-driven Continuum Robots,CDCR)因其柔性结构与仿生运动特性,被广泛认为是内窥镜手术等狭窄腔道操作场景的理想执行机构。然而,在复杂环境中实现高精度轨迹跟踪与抗干扰控制,仍是该类机器人面临的核心技术挑战。
在连续体机器人控制研究中,如何准确获取机器人末端位姿数据,并对控制算法进行客观实验验证,成为评估算法有效性的关键环节。为此,高精度的动作捕捉系统被引入作为末端位姿测量手段。
NOKOV度量动作捕捉系统在实验验证系统中,为研究提供了高精度的绳驱动连续体机器人末端位姿数据。
一、研究背景|内窥镜手术中绳驱动连续体机器人的控制挑战
绳驱动连续体机器人通过多节段柔性结构实现蛇形运动,可在复杂腔道内完成高顺应性导航。然而,绳索摩擦、弹性变形等非线性因素会导致末端执行器位姿误差累积。
此外,内窥镜手术环境中不可预期的组织接触力、流体阻力等外部扰动,使得连续体机器人轨迹跟踪控制面临更高的鲁棒性要求。传统建模与控制方法难以充分补偿上述多源不确定性。
二、研究方法概述|自适应滑模轨迹跟踪控制策略
山东大学研究团队在期刊《Control Engineering Practice》发表论文:
Adaptive sliding mode tracking and disturbance rejection control for cable-driven continuum robots in endoscopic surgery
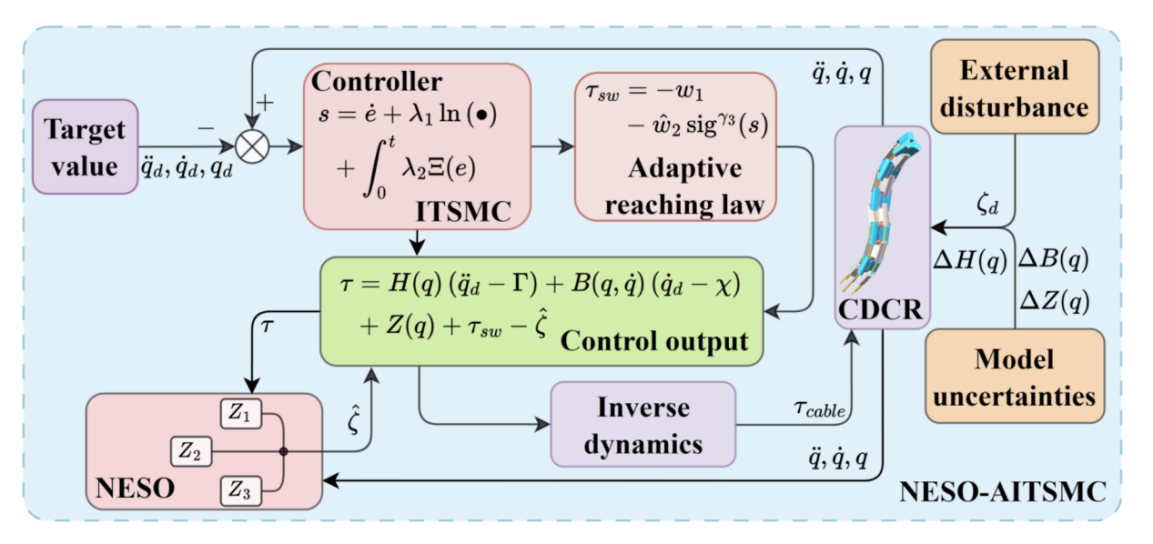
论文提出一种融合非线性扩展状态观测器(NESO)的自适应积分终端滑模控制方法(NESO-AITSMC),用于提升绳驱动连续体机器人在扰动环境下的轨迹跟踪精度。
该方法通过:
- 非线性扩展状态观测器估计模型不确定性与外部扰动
- 融合对数型非线性项的积分终端滑模面
- 自适应快速趋近律平衡收敛速度与抖振抑制
为连续体机器人轨迹跟踪提供了鲁棒控制方案。
三、实验验证|NOKOV 度量动作捕捉支持的连续体机器人轨迹跟踪实验
1、仿真实验
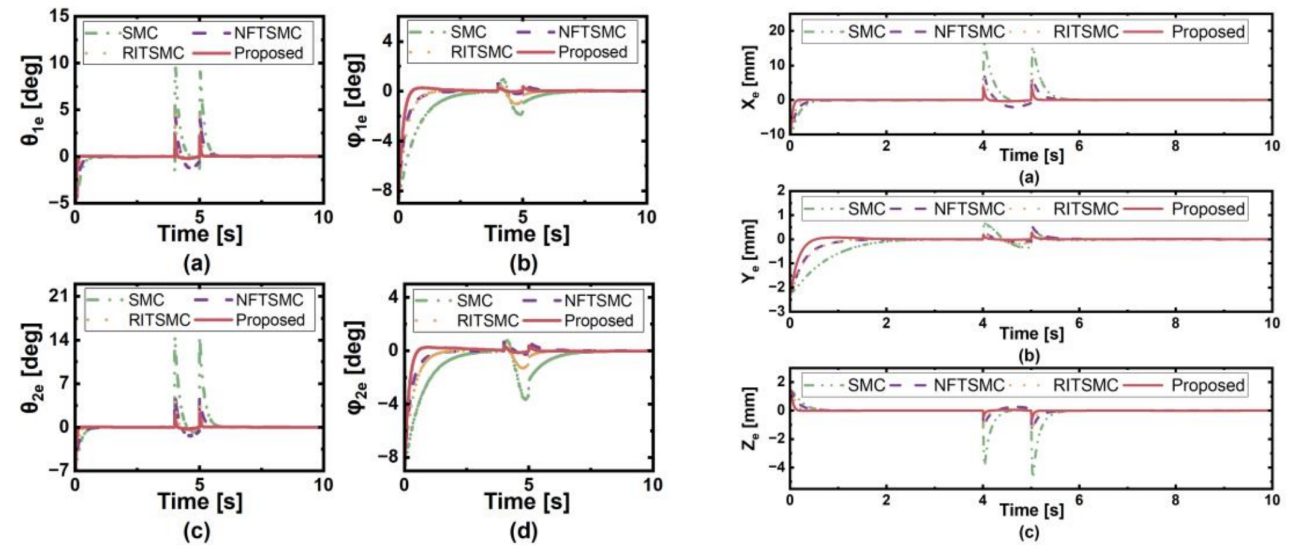
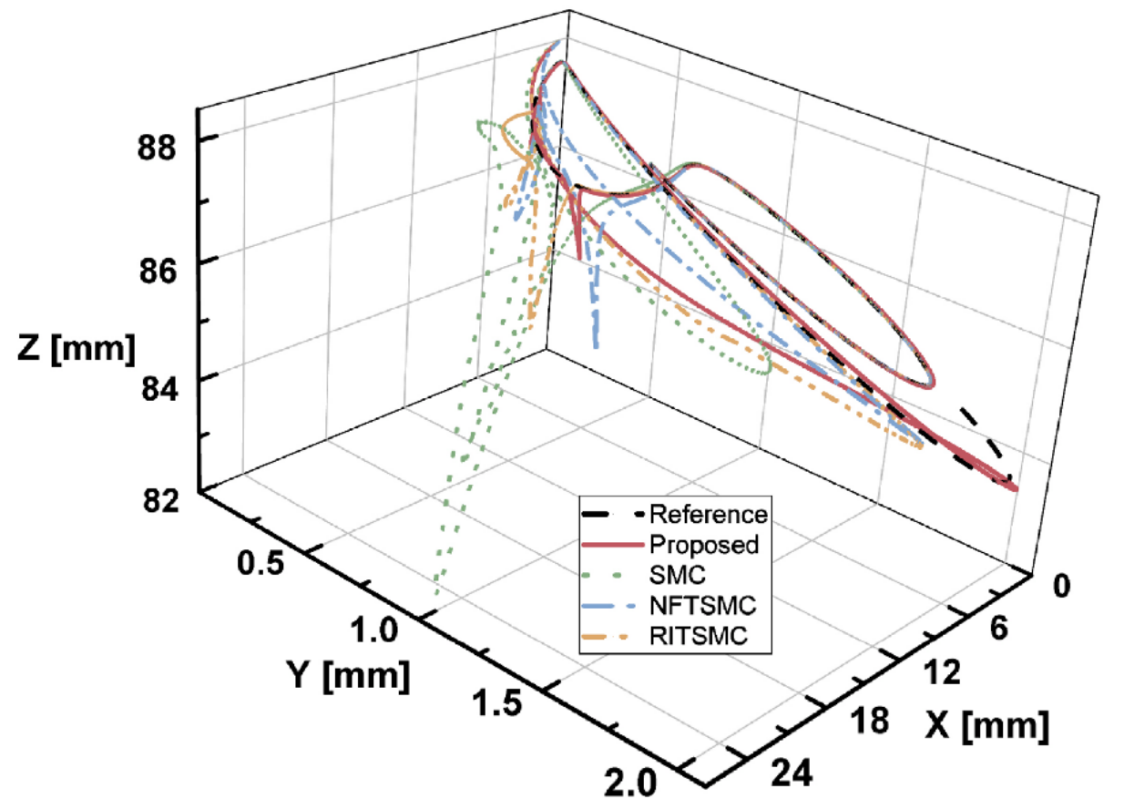
通过数值仿真验证所提NESO-AITSMC控制策略的有效性。仿真选取CDCR作为被控对象,建立动力学模型。
对比分析SMC,NFTSMC,RITSMC等控制策略在模型不确定性与时变干扰下的轨迹跟踪性能。
为验证控制器的抗干扰性能,在t=4-5s时段施加时变突发性接触干扰进行仿真实验。结果表明,引入干扰后各控制器均出现了不同程度的跟踪误差,但本文的控制器产生了最小的误差。其末端位置在XYZ方向的最大误差分别为±3.433mm、±0.275mm和±0.657mm,相比较最优的跟踪效果提升了 51.4%、28.2%及 54.8%。
2、真实实验
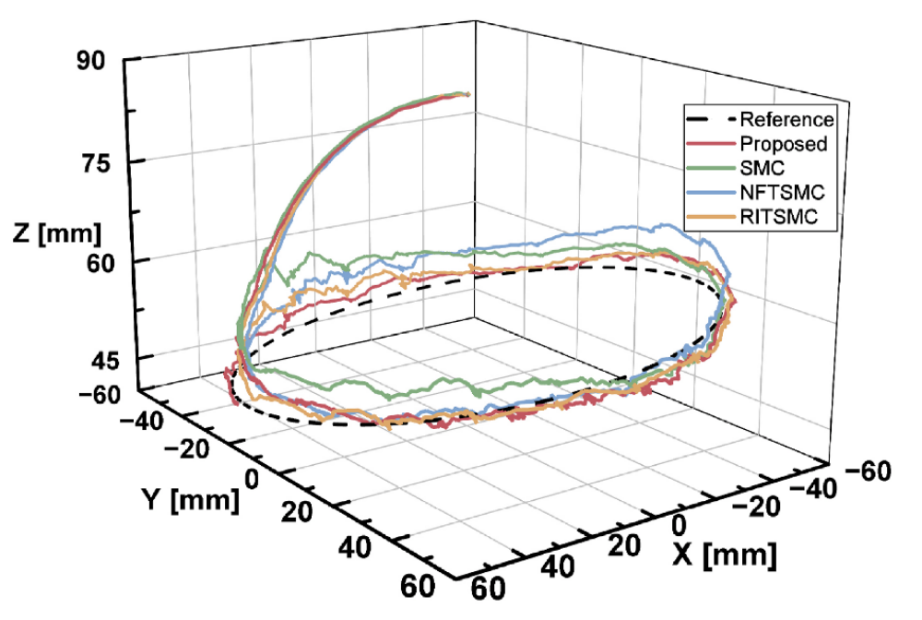
轨迹跟踪实验(Trajectory tracking experiment)
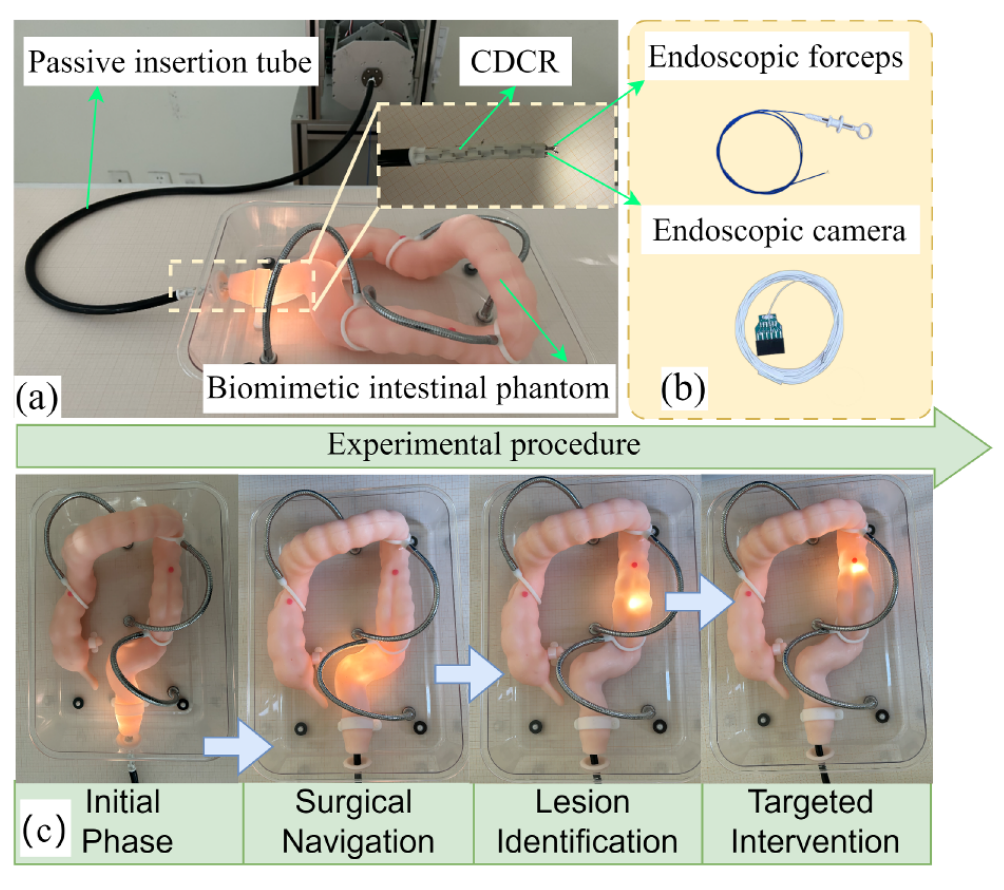
本研究搭建的验证系统核心由三部分组成。
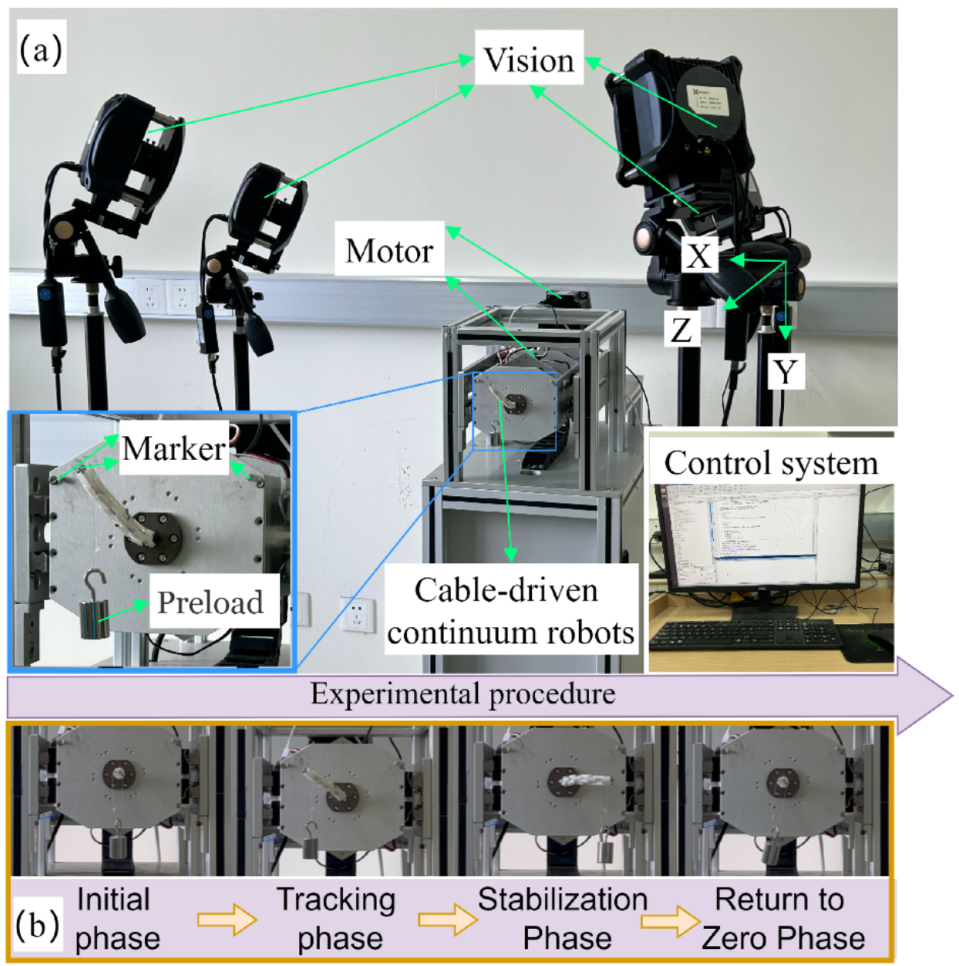
(1) 仿生连续体机械本体:采用熔融沉积成型技术制备PLA材质椎体单元,构成直径10mm、有效长度88mm的仿生柔性结构。
(2) 高精度运动捕捉系统:配置六组NOKOV度量动作捕捉相机(分辨率1280×1024像素,采样率120Hz),通过多目视觉融合算法实现末端位姿测量(精度±0.2mm)。
(3) 实时控制架构:基于Matlab2023b构建NESO-AITSMC算法,通过串行通信协议与ESP32开发板实现双向数据交互,驱动伺服执行机构。
受限于实验条件,通过在连续体机器人末端执行器安装配重模块来等效模拟接触干扰。
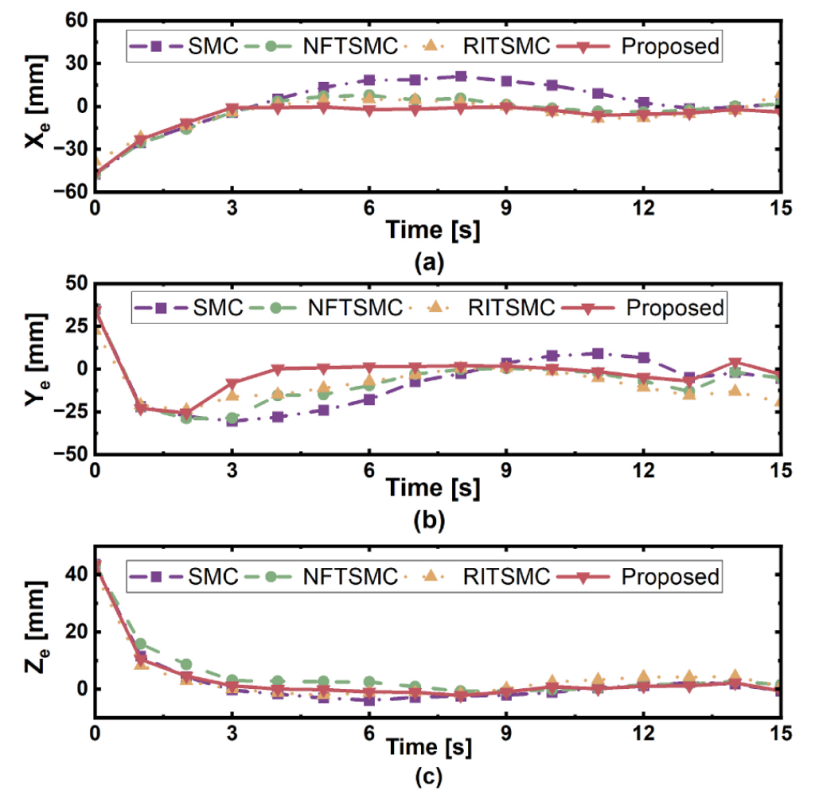
实验结果表明,相较于传统滑模控制(SMC)、非奇异快速终端SMC(NFTSMC)和鲁棒积分终端SMC(RITSMC),本文控制器以最小的轨迹误差实现了优越的跟踪精度。在X/Y/Z三轴方向上,本方案最大跟踪误差峰值分别为3.915mm、4.261mm、2.103mm,较最优的对比控制方法分别降低30.3%、78.2%、51.7%。
3、仿体实验(Phantom experiments)
为验证算法在临床相关场景下的可行性,本研究开发了仿生肠道模型进行活检模拟实验。
实验整合了内窥镜活检钳与高分辨率成像模块,基于自主研制的集成控制系统,配合实时影像导航技术,实现了机器人末端在模拟解剖环境中的精准空间定位与病灶稳定接触。
四、应用场景|动作捕捉在临床相关场景中的应用验证
为进一步验证算法在内窥镜手术相关场景中的适用性,研究团队构建了仿生肠道模型进行活检模拟实验。
在该实验中,NOKOV 度量动作捕捉系统持续采集连续体机器人末端位姿信息,配合实时影像导航技术,实现机器人末端在模拟解剖环境中的精准空间定位与稳定操作。
五、NOKOV 度量动作捕捉在连续体机器人控制研究中的价值
本研究表明,在绳驱动连续体机器人轨迹跟踪与抗干扰控制研究中,NOKOV 度量动作捕捉系统为控制算法提供了高精度、稳定、可重复的末端位姿测量手段。
通过动作捕捉系统获取的真实位姿数据,研究人员能够:
- 客观评估控制算法的轨迹跟踪性能
- 验证复杂扰动环境下的控制鲁棒性
- 支撑连续体机器人在内窥镜手术等高精度应用场景中的技术落地
六、关于绳驱动连续体机器人相关研究FQA
Q1:什么是绳驱动连续体机器人?它适合哪些应用场景?
A1:绳驱动连续体机器人(Cable-driven Continuum Robot, CDCR)是一类由柔性节段和绳索驱动构成的机器人,其本体能够实现类似生物脊柱或蛇形结构的连续弯曲运动。
由于其高柔顺性和狭窄空间适应能力,绳驱动连续体机器人被广泛应用于内窥镜手术、微创介入操作以及复杂腔道环境下的精细操作任务。
Q2:绳驱动连续体机器人在轨迹跟踪控制中面临哪些关键挑战?
A2:绳驱动连续体机器人在轨迹跟踪过程中主要面临以下挑战:
- 绳索摩擦和弹性变形引起的非线性动力学特性
- 机器人模型参数不确定性
- 内窥镜手术环境中不可预期的接触干扰和外部扰动
这些因素会导致末端执行器位姿误差累积,传统控制方法难以同时兼顾精度和鲁棒性。
Q3:该研究提出了怎样的控制方法来提升轨迹跟踪精度?
A3:论文提出了一种融合非线性扩展状态观测器(NESO)的自适应积分终端滑模轨迹跟踪控制方法(NESO-AITSMC)。
该方法能够对模型不确定性和外部扰动进行联合估计,并通过自适应滑模控制机制实现误差的快速收敛,从而显著提绳驱动连续体机器人的轨迹跟踪精度和抗干扰能力。
Q4:如何在实验中验证绳驱动连续体机器人控制算法的有效性?
A4:在实验验证阶段,研究团队引入 NOKOV 度量动作捕捉系统 对绳驱动连续体机器人末端执行器位姿进行高精度测量。
通过多相机协同测量方式,动作捕捉系统实时采集机器人三维位姿数据,为轨迹跟踪误差分析和不同控制方法的性能对比提供了可靠实验依据,从而验证了所提出控制算法的有效性。
七、论文信息
引用格式
Zhang M, Chen Y, Gao Y, et al. Adaptive sliding mode tracking and disturbance rejection control for cable-driven continuum robots in endoscopic surgery[J]. Control Engineering Practice, 2026, 168: 106684.

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 36
36 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)