运送铝活塞铸造毛坯机械手设计
本文系统介绍了工业机器人的总体设计及控制系统。第二章详细阐述了工业机器人的四大组成部分:执行系统(手部、腕部、臂部、机身)、驱动系统(机械/液压/气压/电传动)、控制系统和检测系统,并提出了铝活塞搬运机器人的具体设计方案。第三章分析了机器人的运动系统,包括自由度、工作空间和圆柱坐标型机械结构,说明了其运动过程。第四章重点论述了计算机控制系统,包括点位/连续轨迹两种控制方式,以及采用IBM-PC和8
第2章 工业机器人的总体设计
2.1 工业机器人的组成及各部分关系概述
它主要由机械系统(执行系统、驱动系统)、控制检测系统及智能系统组成。
A、执行系统:执行系统是工业机器人完成抓取工件,实现各种运动所必需
的机械部件,它包括手部、腕部、机身等。
(1)手部:机器人为了进行作业而配置的操作机构,又称手爪或抓取机构,它直接抓取工件或夹具。
(2)腕部:又称手腕,是连接手部和臂部的部件,其作用是调整或改变手部的工作方位。
(3)臂部:联接机座和手部的部分,是支承腕部的部件,作用是承受工件的管理管理荷重,改变手部的空间位置,满足机器人的作业空间,将各种载荷传递到机座。
(4)机身:机器人的基础部分,起支撑作用,是支撑手臂的部件,其作用是带动臂部自转、升降或俯仰运动。
B、驱动系统:为执行系统各部件提供动力,并驱动其动力的装置。常用的有
机械传动、液压传动、气压传动和电传动。
C、控制系统:通过对驱动系统的控制,使执行系统按照规定的要求进行工作,当发生
错误或故障时发出报警信号。
D、检测系统:作用是通过各种检测装置、传感装置检测执行机构的运动情况,根据需
要反馈给控制系统,与设定进行比较,以保证运动符合要求。
2.2工业机器人的设计分析
2.2.1 设计要求
通过设计机械手,培养综合运用所学过的基本理论、基本知识和基本方法分析能力和解决问题的能力。
有关数据:设计一机械手、将铝活塞铸造毛坯从模具中取出,并运送到离模具2米远处的铝活塞毛坯箱里。(铝活塞的基本尺寸等技术要求参见顾崇衍编《机械制造工艺学》P91~P100。)
零件尺寸:外孔 ¢101.6,高 106。
零件材料:铝。
2.2.2 总体方案拟定
在工业机器人的诸多功能中,抓取和移动是最主要的功能。这两项功能实现的技术基础是精巧的机械结构设计和良好的伺服控制驱动。本次设计就是在这一思维下展开的。根据设计内容和需求确定工业机器人工作方式,利用步进电机驱动和锥齿轮传动来实现机器人的旋转运动;利用一个液压缸,使手臂实现上下运动;考虑到本设计中的机器人工作范围不大,故利用液压缸驱动实现手臂的伸缩运动;末端夹持器则采用滑槽杠杆式回转型夹持器,用小型液压缸驱动夹紧。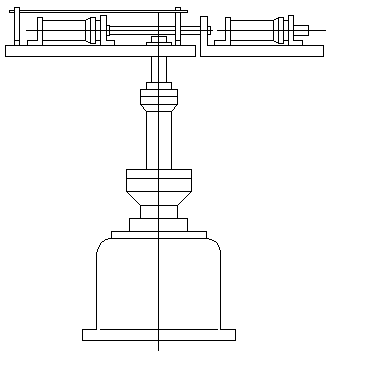
图2-1 机器人外形图
第3章 工业机器人的机械系统设计
3.1 工业机器人的运动系统分析
3.1.1 机器人的运动概述
工业机器人的运动,可从工业机器人的自由度,工作空间和机械结构类型等三方面来讨论。
如图2-1所示,为工业机器人机构的简图。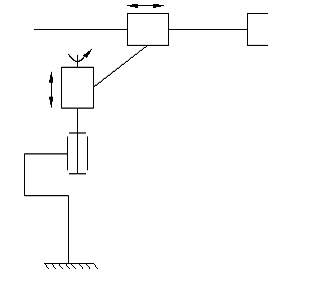
图3-1 机构简图
a.工业机器人的运动自由度
所谓机器人的运动自由度是指确定一个机器人操作位置时所需要的独立运动参数的数目,它是表示机器人动作灵活程度的参数。
本设计的工业机器人具有四转动副和移动副两种运动副,具有手臂伸降,旋转,前后往复三自由度。
b.机器人的工作空间和机械结构类型
(1)工作空间 工作空间是指机器人正常运行时,手部参考点能在空间活动的最大范围,是机器人的主要技术参数,工作空间图如图2-2。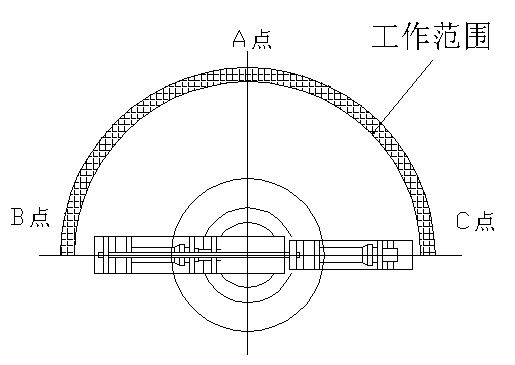
图3-2 工作空间图
(2)机械结构类型
圆柱坐标型为本设计所采用方案,这种运动形式是通过一个转动,两个移动,共三个自由度组成的运动系统(代号RPP),工作空间图形为圆柱形。它与直角坐标型比较,在相同的工作条件下,机体占体积小,而运动范围大。
3.1.2 机器人的运动过程分析
工业机器人的运动过程中各动作如图3-3和表3-1。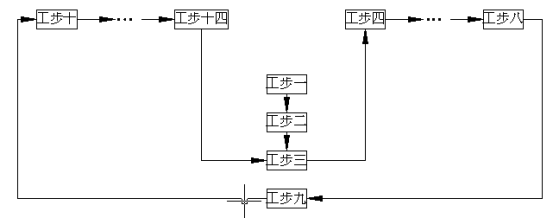
图3-3
第四章 工业机器人的计算机控制系统概述
4.1 工业机器人控制系统的特点及对控制功能的基本要求
工业机器人具有多个自由度,每个自由度一般包括一个伺服机构,它们必须协调起来,组成一个多变量控制系统。这种多变量的控制系统,一般要用计算机来实现。因此,机器人控制系统也是一个计算机控制系统。控制系统的功能是控制机器人操作机的运动和操作以满足作业的要求。在作业中机器人的工作任务是要求操作机的末端执行器按点位或轨迹运动,并保持设定的姿态。在运动中或在规定的某点位执行作业规定的操作。对工业机器人的控制功能大致有如下的基本要求和特点。
A、实现对位姿、速度、加速度等的控制功能
在机器人的各类作业中,运动和控制方式主要有两种。
1)点位控制方式(PTP控制) 这种控制方式考虑到末端执行器在运动过程中只在某些规定的点上进行操作,因此只要求末端执行器在目标点处保证准确的位姿以满足作业质量要求。而对达到目标点的运动轨迹(包括移动的路径和运动的姿态)则不作任何规定,如图4-1 a)图,这种控制方式易于实现,但不易达到较高的定位精度,适用于上下料、搬运、点焊和在电路板上安插元件等只要求在目标点保持末端执行器准确的位姿的作业中。
2)连续轨迹控制方式(CP控制) 这种控制方式要求末端执行器严格按规定的轨迹和速度在一定精度要求内运动,以完成作业要求,这种必须保证机器人各关节连续、同步地实现相应的运动。如图4-1b)图,这种连续轨迹运动,可看成是若干密集轨迹曲线。若设定的点足够密,就能用点位控制的方法实现所需精度的连续轨迹运动。
B、存储和示教功能
要使机器人具有完成预定作业的功能,须先将要完成的作业示教给机器人,这个操作过程称为示教,将示教内容记录下来,称为存储。使工业机器人按照存储的示教内容进行动作,称为再现。所以工业机器人的动作是通过示教—存储—再现的过程实现的。
C、对外部环境的检测和感觉功能。
4.2 计算机控制系统的设计方案
控制系统采用二级计算机控制方式,选用IBM-PC,80C51系列CPU。
第一级机担负管理,示教编程,控制再现,轨迹正逆运算,机器人语言的编辑和编译,通过串行通讯方式传送给二级机做位置给定。第二级机负责位置伺服控制软件的计算,位置检测等工作,根据插补算出的各关节位置增量做位置给定。
一级机与示教盒通讯采用串行RS-232接口,既接收示教盒信息,完成示教动作,又向示教盒发送信息,显示示教情况。还可以连接软驱,CRT终端。
二级机接口电路将计算机输出数字量转换成相应的模拟量,驱动伺服控制系统,选用速度单元,伺服电机及光电编码盘等伺服调速系统。
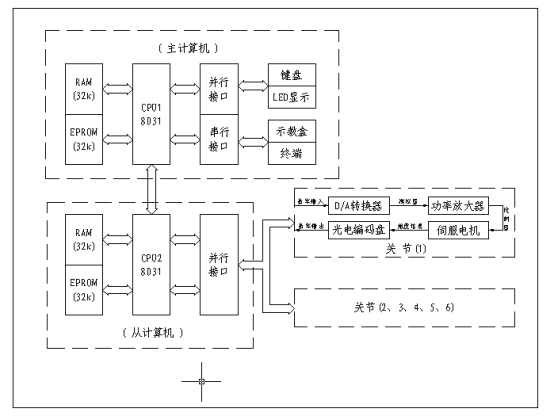
4-1 机器人控制系统框图

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)