小龙虾OpenClaw+Docker一键部署+飞书接入-保姆级全攻略
本文详细介绍了开源AI助手框架OpenClaw的部署与飞书接入方法。首先通过Docker一键部署OpenClaw,包括环境准备、配置编写、初始化及验证步骤。然后重点讲解了两种飞书机器人接入方案:针对腾讯云用户的快捷配置方法,以及通用的手动配置流程,涵盖创建飞书应用、获取凭证、配置权限和事件订阅等关键环节。整个教程提供完整操作指引,适合各类用户快速实现AI助手部署和即时通讯平台集成。
一、前言
最近在捣鼓各种 AI Agent 框架,发现了一个宝藏项目——OpenClaw(俗称"小龙虾")。这货是一个开源的 AI 助手框架,支持自定义 Agent、多种渠道接入,关键是部署简单、功能强大。
本来是奔着玩一玩的心态,结果一发不可收拾。先是用了 Docker 部署,接着又接入了飞书机器人。现在在群里调戏 AI 已经成为日常操作…
今天把我的完整部署和接入过程分享出来,希望对想上手的同学有所帮助。本文保姆级教程,小白也能看懂!

二、Docker 一键部署 OpenClaw
2.1 环境准备
首先,你需要一个安装了 Docker 和 Docker Compose 的运行环境:
Windows / macOS 用户: 直接去 Docker 官网下载 Docker Desktop 即可,一键安装无烦恼。
Linux 用户(以 Ubuntu 为例):
# 一键安装 Docker
curl -fsSL https://get.docker.com | sudo sh
# 添加当前用户到 docker 组(退出重登录生效)
sudo usermod -aG docker $USER
2.2 编写 docker-compose.yml
创建一个项目目录,把下面的配置存进去:
mkdir ~/openclaw-docker && cd ~/openclaw-docker
新建 docker-compose.yml,内容如下:
services:
openclaw-gateway:
image: ghcr.io/openclaw/openclaw:latest
container_name: openclaw
restart: unless-stopped
ports:
- "18789:18789"
volumes:
- ./data:/home/node/.openclaw
- ./workspace:/home/node/workspace
environment:
- TZ=Asia/Shanghai
- NODE_ENV=production
- AUTH_PASSWORD=admin123456
cap_drop:
- NET_RAW
- NET_ADMIN
security_opt:
- no-new-privileges:true
# 使用 lan 模式,允许外部访问
command: node openclaw.mjs gateway --bind lan --port 18789 --allow-unconfigured
2.3 初始化配置
首次启动前,需要配置 allowedOrigins(允许访问的来源):
# 1. 先创建配置目录
mkdir -p ./data
mkdir -p ./workspace
# 2. 创建初始配置文件 ./data/openclaw.json
cat > ./data/openclaw.json << 'EOF'
{
"gateway": {
"mode": "local",
"bind": "lan",
"port": 18789,
"auth": {
"mode": "password",
"password": "admin123456"
},
"controlUi": {
"allowedOrigins": [
"http://localhost:18789",
"http://127.0.0.1:18789",
"http://YOUR_SERVER_IP:18789"
]
}
}
}
EOF
这里有个小坑提醒一下:记得把 YOUR_SERVER_IP 替换成你服务器的实际 IP 地址,比如 172.16.8.14。
2.4 启动与验证
一切就绪,开始启动:
# 1. 创建数据持久化目录
mkdir -p ./data
mkdir -p ./workspace
# 2. 启动容器(后台运行)
docker compose up -d
# 3. 查看实时日志,确认启动成功
docker compose logs -f
看到类似 [gateway] listening on ws://0.0.0.0:18789 的日志,说明启动成功了!
接下来打开浏览器访问:
- 宿主机:127.0.0.1:18789 或 你的服务器IP:18789
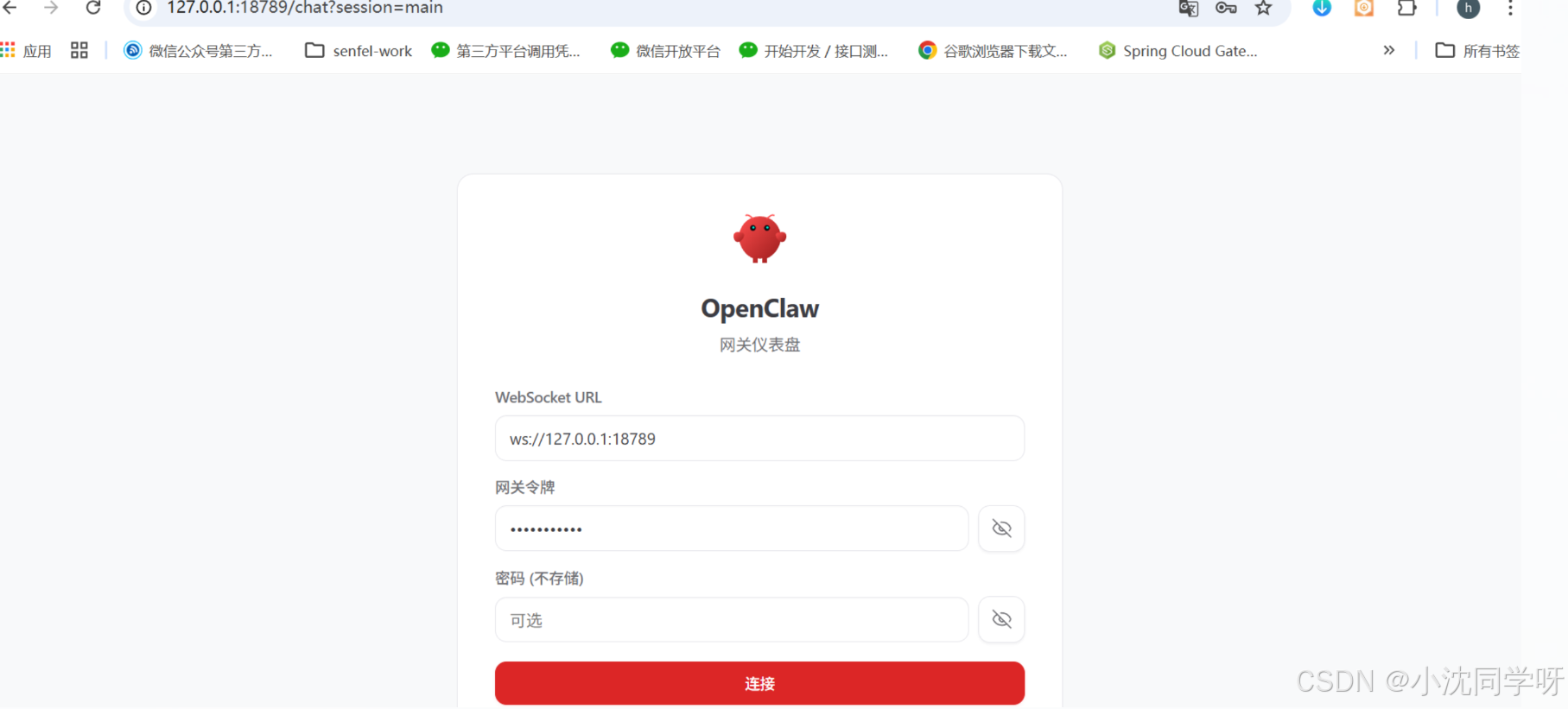
2.5 容器内初始化(首次必需)
第一次使用需要跑一下初始化向导:
# 进入容器执行初始化配置向导
docker exec -it openclaw bash
# 运行 onboard 向导
openclaw onboard
向导会依次问你几个问题,这里给出一个快速配置示例:
◆ I understand this is personal-by-default...: yes
◆ Setup mode: QuickStart
◆ Config handling: Use existing values
◆ Model/auth provider: 输入 API Key(以 minimax 为例)
API: https://api.minimaxi.com/anthropic
key: 你的API密钥
◆ Select channel: skip
◆ Search provider: skip
◆ Configure skills: skip
◆ Enable hooks: skip
◆ How do you want to hatch your bot?: web-ui
完成后输入 exit 退出容器。
2.6 配对登录
由于 Docker 有自己的内部网络,即使配置了 mode: “local”,Gateway 也会把 Docker NAT 视为外部连接,需要手动配对。
在服务器上执行:
# 1. 查看待配对设备
docker exec openclaw openclaw devices list
# 2. 批准配对请求
docker exec openclaw openclaw devices approve <device-id>
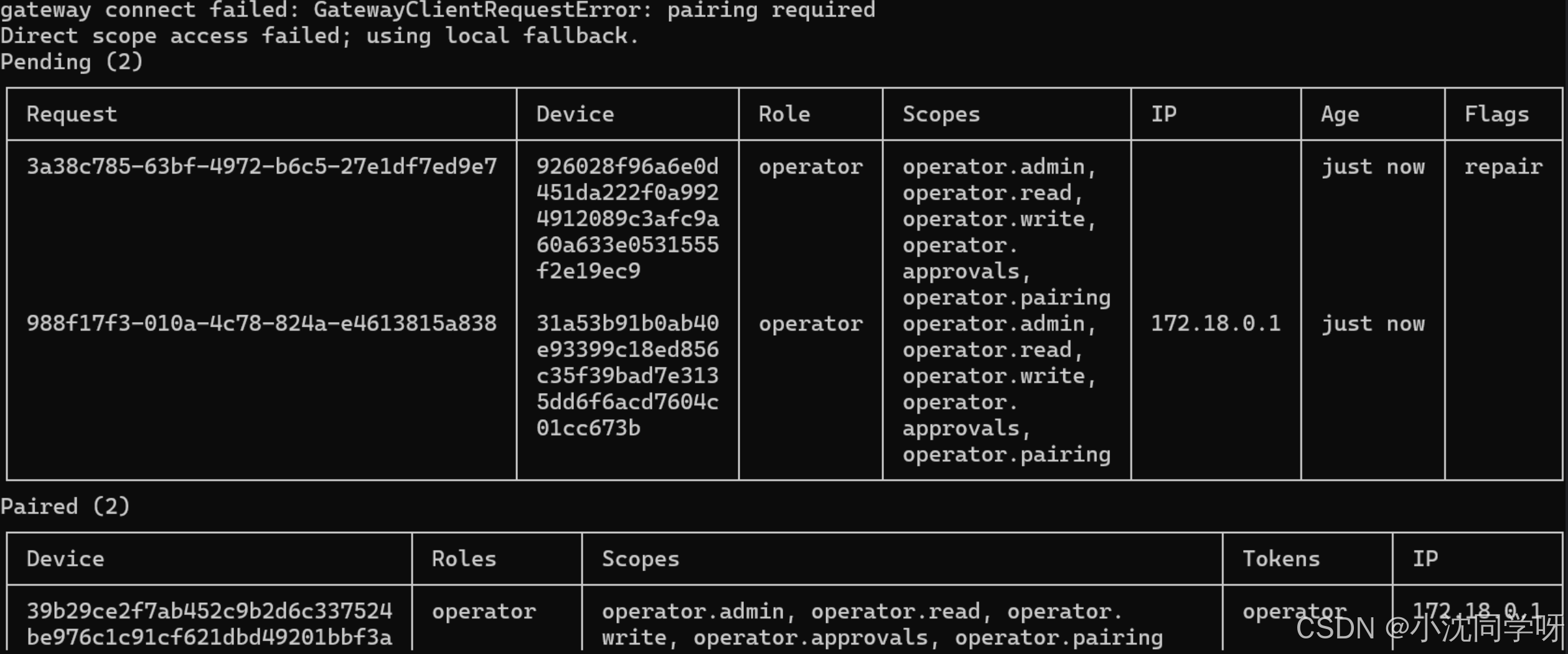
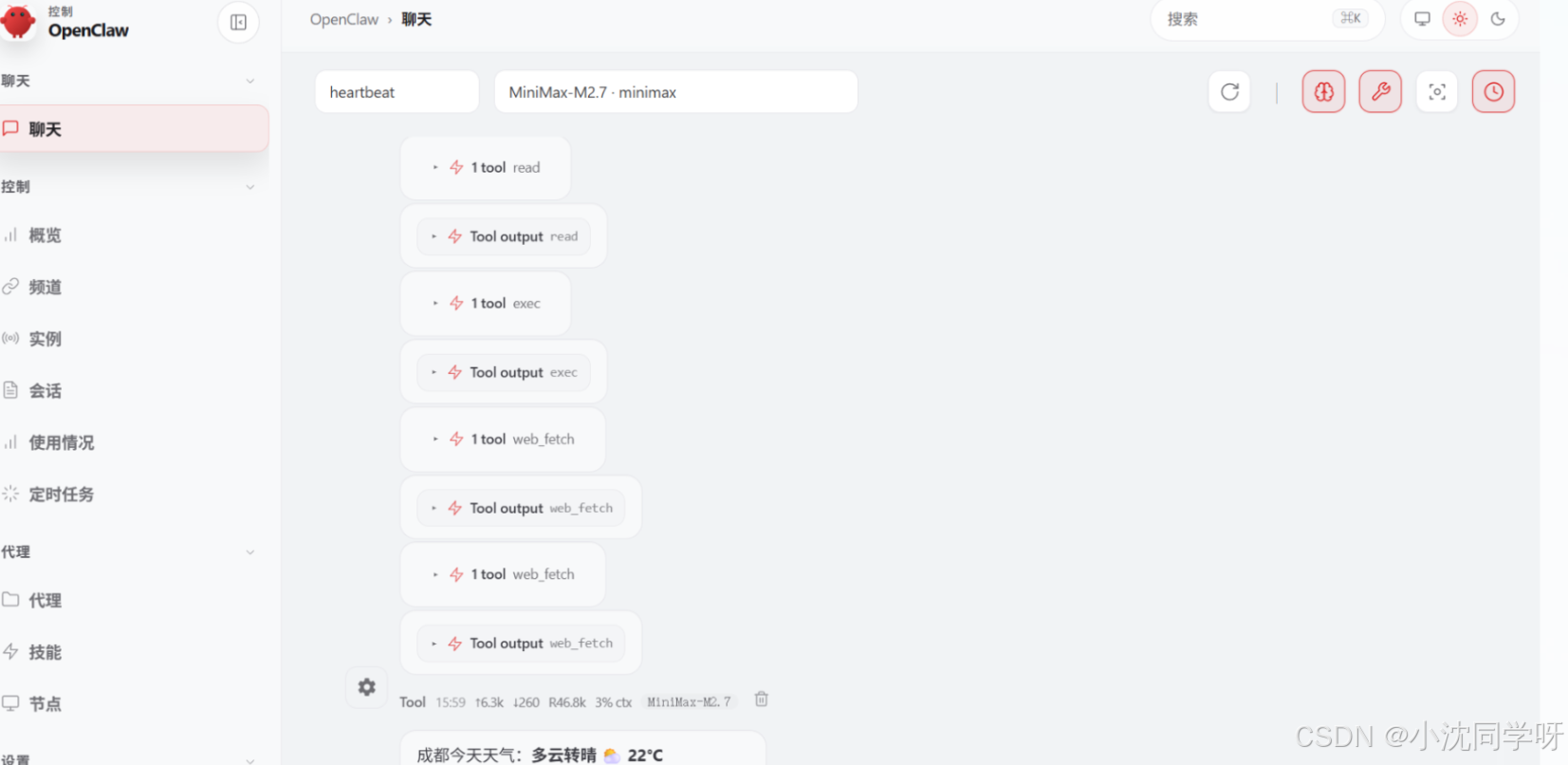
配对成功后,就能愉快地和 AI 玩耍了!
三、飞书机器人接入
把 AI 接到飞书里,直接在群里调戏,这体验用过都说香!
3.1 前置准备
- 已部署好的 OpenClaw
- 飞书账号(个人或企业版均可)
3.2 快捷配置(腾讯云用户)
如果你用的是腾讯云 Lighthouse 等云服务器,配置非常简单:
1.进入腾讯云控制台 → Lighthouse 实例 → 管理实例
2.进入应用管理 → 模型配置(设置 API Key)
3.选择通道 飞书 → 点击 快捷配置 → 前往授权
4.用飞书 App 扫码,选择"继续授权登录"
5.返回控制台点击"我已完成扫码"
⚠️ 注意:如果没有发布权限,会提示"飞书机器人发布失败",需要联系管理员审批,或者用下面的手动配置。
3.3 手动配置(通用方案)
快捷配置失败的同学跟我走这边,手动配置其实也不难。
步骤 1:创建飞书应用
登录飞书开放平台(https://open.feishu.cn/),点击 创建企业自建应用,填写应用名称、描述,上传一个图标(随便找个图就行)。
步骤 2:添加机器人能力
在应用管理页左侧导航栏点击 添加应用能力,选择 机器人 → 点击添加。
步骤 3:获取凭证
进入 凭证与基础信息 页面,复制保存:
- App ID(通常以 cli_ 开头)
- App Secret(注意保密,别泄露)
步骤 4:配置权限
进入 权限管理 → 点击 批量导入权限,粘贴以下 JSON:
{
"scopes": {
"tenant": [
"im:message",
"im:message.p2p_msg:readonly",
"im:message.group_at_msg:readonly",
"im:message:send_as_bot",
"im:resource",
"contact:user.base:readonly",
"im:message.group_msg",
"im:message:readonly",
"im:message:update",
"im:message:recall",
"im:message.reactions:read",
"docx:document:readonly",
"drive:drive:readonly",
"wiki:wiki:readonly",
"bitable:app:readonly",
"task:task:read",
"contact:contact.base:readonly",
"docx:document",
"docx:document.block:convert",
"drive:drive",
"wiki:wiki",
"bitable:app",
"task:task:write"
],
"user": []
}
}
点击 申请开通,等待权限生效。
步骤 5:配置事件订阅
进入 事件与回调 页面:
- 订阅方式选择 使用长连接接收事件 → 保存
- 点击 添加事件,搜索并添加 接收消息(im.message.receive_v1)
可选:如果你想在群聊里用,继续添加:消息已读、机器人进群、机器人被移出群。
⚠️ 如果提示"应用未建立长连接",请检查 App ID 和 App Secret 是否正确配置,或重启 OpenClaw 网关服务。
步骤 6:在 OpenClaw 中添加飞书频道
打开终端执行:
docker exec -it openclaw bash
openclaw channels add
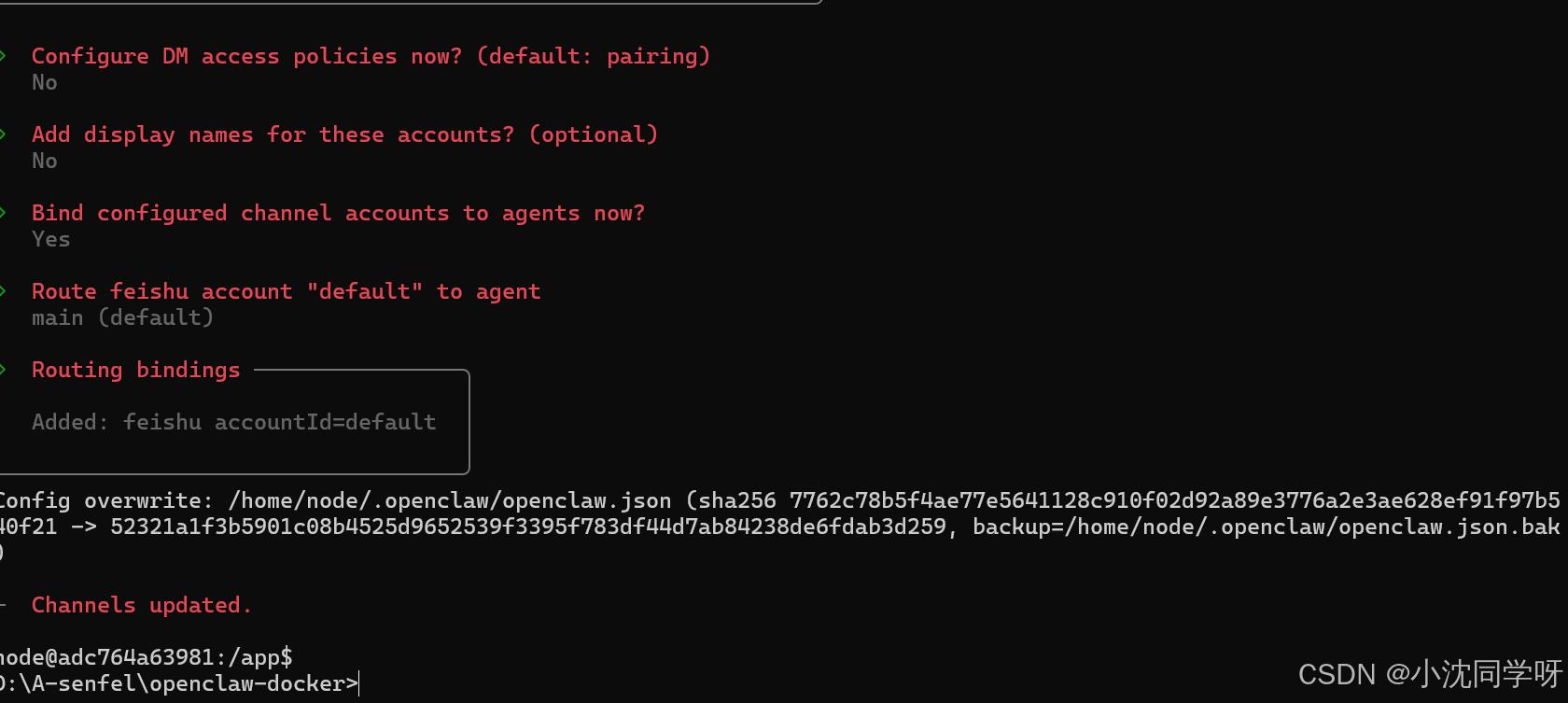
按向导操作:
- 选择 Feishu/Lark (飞书)
- 输入 App Secret 和 App ID
- 连接模式选择 WebSocket 长连接
- 国内用户选择 Feishu 频道
- 群聊策略可选 Open(响应所有群聊)或 Allowlist(仅白名单群聊)
也可以用命令行开启飞书插件:
openclaw plugins enable feishu
步骤 7:发布应用
最后一步别忘了:
- 进入 版本管理与发布
- 点击 创建版本,填写版本号(如 1.0.0)和更新说明
- 点击 保存并申请发布
- 等待管理员审核通过(如果你就是管理员,可在飞书管理后台自行通过)

四、配对与使用
4.1 首次配对
飞书配置好了,现在需要配对才能用:
1.在飞书搜索框输入机器人名称,找到它
2.发送任意消息,机器人会回复一个配对码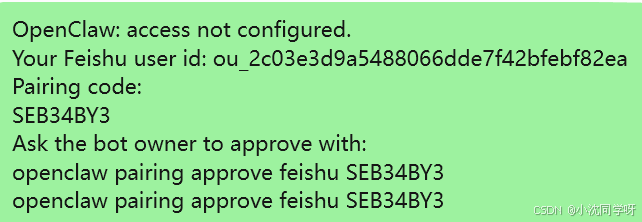
3.在 OpenClaw 终端执行配对:
openclaw pairing approve feishu <配对码>
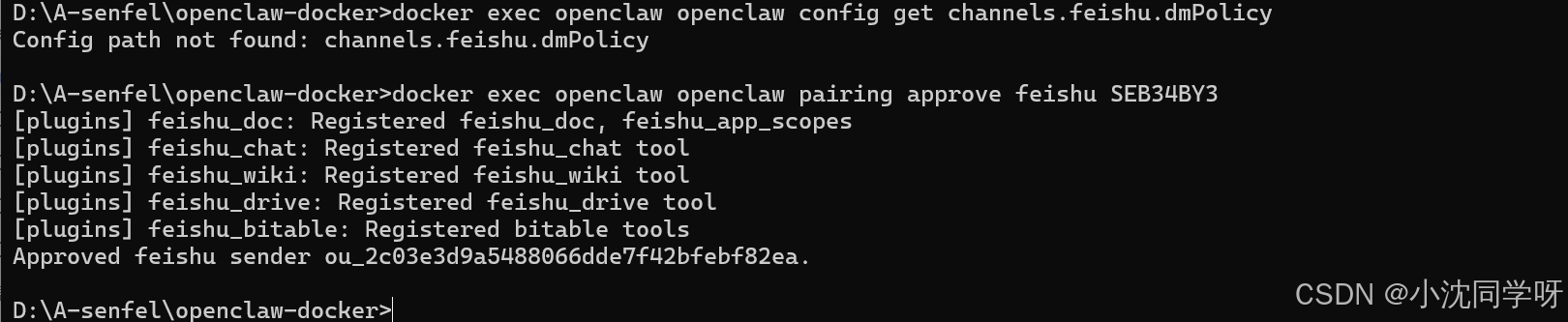
或者查看待处理配对请求:
openclaw pairing list feishu
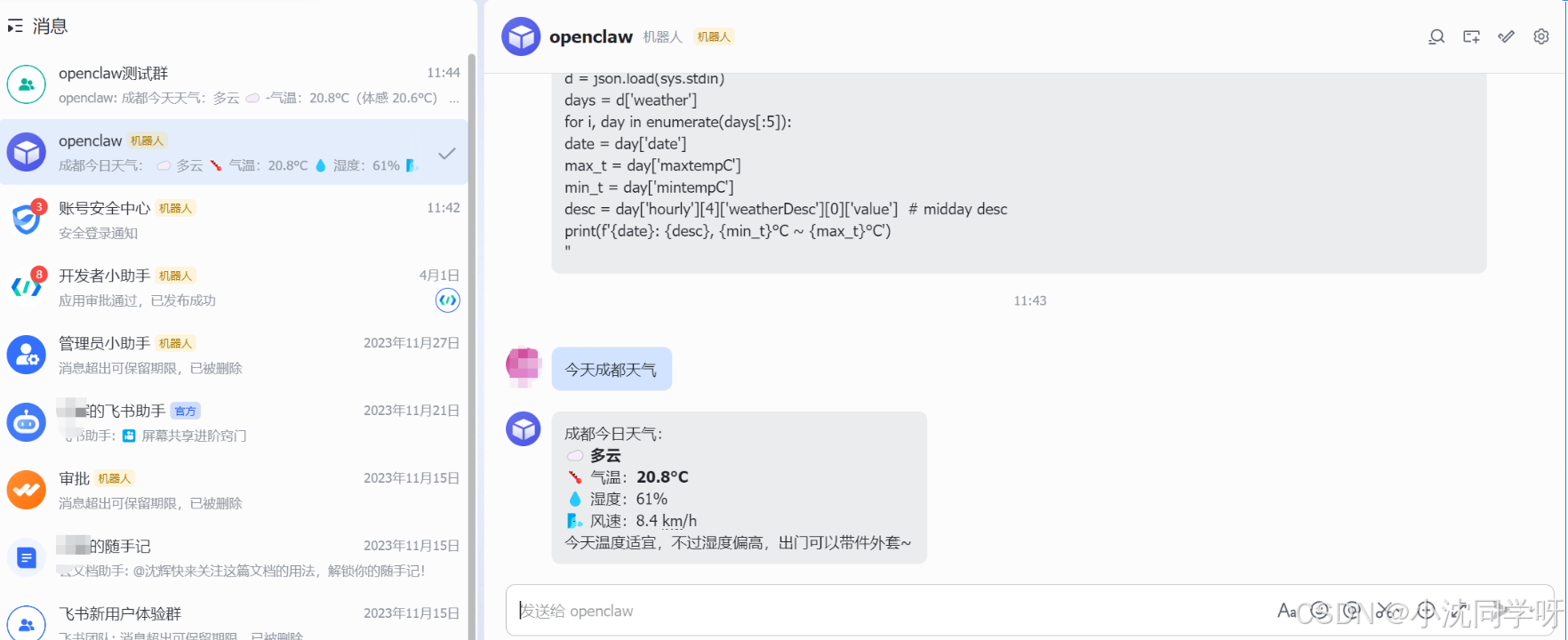
配对成功后就可以正常对话了!
4.2 添加进群聊
- 进入群聊 → 设置 → 添加机器人
- 搜索你的机器人名称 → 添加
⚠️ 注意:机器人只能被添加进同一企业的群聊,外部群无法添加。
4.3 斜杠命令
在飞书对话框中可以直接用这些命令:
| 命令 | 功能 |
|---|---|
| /new | 清空上下文,开启新对话(省 Tokens) |
| /verbose on | 开启调试模式,查看 AI 执行细节 |
| /verbose off | 关闭调试模式 |
4.4 多媒体能力
接入飞书后,可以发送图片、语音、视频、文件,OpenClaw 会自动处理,爽!
五、常见问题汇总
| 问题 | 解决方案 |
|---|---|
| "应用未建立长连接 | "检查 App ID/App Secret 是否正确,重启 OpenClaw 网关 |
| “飞书机器人发布失败” | 联系管理员审批,或开启"全员免审"规则 |
| “没有待处理的配对请求” | 确保已发送消息获取配对码,检查通道配置是否正确 |
六、总结
到这里,你的 OpenClaw 已经部署完成,并且成功接入了飞书。现在你可以:
- 在浏览器里直接和 AI 对话
- 在飞书群里调戏 AI
- 让 AI 帮你处理各种任务
Docker 部署的好处是环境隔离、统一体验、安全可控,升级也就是一行命令的事。飞书接入后,团队协作更加便捷,AI 助手触手可及。
感兴趣的同学赶紧动手试试吧,有问题欢迎在评论区交流!
感谢各位看官的一路陪伴,大家都再接再厉!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)