机械臂轨迹跟踪控制:从2自由度到6自由度,DDPG强化学习算法与Simulink仿真实践
2自由度机械臂轨迹跟踪控制,6自由度机械臂轨迹跟踪控制,基于强化学习DDPG的机械臂轨迹跟踪,控制算法,强化学习算法,将强化学习DDPG作为机械臂的轨迹跟踪控制器,simulink仿真。在机器人领域,机械臂的轨迹跟踪控制一直是研究热点。从简单的2自由度机械臂到复杂的6自由度机械臂,如何精准控制其轨迹,关乎着各类任务的执行效果。而强化学习算法,特别是深度确定性策略梯度(DDPG),为机械臂轨迹跟踪控
2自由度机械臂轨迹跟踪控制,6自由度机械臂轨迹跟踪控制,基于强化学习DDPG的机械臂轨迹跟踪,控制算法,强化学习算法,将强化学习DDPG作为机械臂的轨迹跟踪控制器,simulink仿真。
在机器人领域,机械臂的轨迹跟踪控制一直是研究热点。从简单的2自由度机械臂到复杂的6自由度机械臂,如何精准控制其轨迹,关乎着各类任务的执行效果。而强化学习算法,特别是深度确定性策略梯度(DDPG),为机械臂轨迹跟踪控制带来了新的思路。
2自由度与6自由度机械臂轨迹跟踪控制基础
2自由度机械臂相对简单,通常可在平面内进行运动控制。以常见的笛卡尔坐标系下的2连杆机械臂为例,其正向运动学可通过齐次变换矩阵来描述:
import numpy as np
def forward_kinematics_2dof(theta1, theta2, l1, l2):
T01 = np.array([[np.cos(theta1), -np.sin(theta1), 0, l1 * np.cos(theta1)],
[np.sin(theta1), np.cos(theta1), 0, l1 * np.sin(theta1)],
[0, 0, 1, 0],
[0, 0, 0, 1]])
T12 = np.array([[np.cos(theta2), -np.sin(theta2), 0, l2 * np.cos(theta2)],
[np.sin(theta2), np.cos(theta2), 0, l2 * np.sin(theta2)],
[0, 0, 1, 0],
[0, 0, 0, 1]])
T02 = np.dot(T01, T12)
return T02这段代码通过给定的关节角度 theta1、theta2 以及连杆长度 l1、l2,计算出机械臂末端在空间中的位置。对于2自由度机械臂的轨迹跟踪控制,可基于经典控制算法如PID来实现初步的位置跟踪。
然而,6自由度机械臂能在三维空间中完成更复杂的任务,其正向运动学和逆运动学的求解更为复杂。正向运动学涉及多个关节的旋转和平移变换,逆运动学则是根据目标位置和姿态求解关节角度。以常见的6R机器人(6个旋转关节)为例,其正向运动学需多次运用齐次变换矩阵的乘积来计算末端位姿。
强化学习DDPG算法
强化学习旨在通过智能体与环境的交互,让智能体学习到最优策略以最大化累积奖励。DDPG是一种基于深度神经网络的无模型强化学习算法,结合了深度Q网络(DQN)和确定性策略梯度(DPG)的思想。
2自由度机械臂轨迹跟踪控制,6自由度机械臂轨迹跟踪控制,基于强化学习DDPG的机械臂轨迹跟踪,控制算法,强化学习算法,将强化学习DDPG作为机械臂的轨迹跟踪控制器,simulink仿真。
DDPG包含两个神经网络:策略网络(Actor)和价值网络(Critic)。策略网络输出动作,价值网络评估动作的价值。以下是一个简化的DDPG算法伪代码框架:
# 初始化Actor网络和Critic网络
actor = ActorNetwork()
critic = CriticNetwork()
# 初始化目标Actor网络和目标Critic网络
target_actor = ActorNetwork()
target_critic = CriticNetwork()
# 初始化经验回放池
replay_buffer = ReplayBuffer()
for episode in range(num_episodes):
state = env.reset()
for step in range(max_steps_per_episode):
# 根据策略网络生成动作,加入噪声以增加探索
action = actor.predict(state) + noise()
next_state, reward, done, _ = env.step(action)
# 将经验存储到回放池中
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
if done:
break
if len(replay_buffer) > batch_size:
# 从回放池中采样一批经验
batch = replay_buffer.sample(batch_size)
states, actions, rewards, next_states, dones = batch
# 更新Critic网络
target_actions = target_actor.predict(next_states)
target_q_values = target_critic.predict(next_states, target_actions)
q_targets = rewards + (1 - dones) * gamma * target_q_values
critic.train(states, actions, q_targets)
# 更新Actor网络
actor_actions = actor.predict(states)
actor_loss = -critic.predict(states, actor_actions)
actor.train(states, actor_loss)
# 软更新目标网络
target_actor.soft_update(actor)
target_critic.soft_update(critic)在这个框架中,智能体在环境中不断尝试不同动作,将每次交互的经验存储在回放池中。通过从回放池中采样经验数据,分别对Critic网络和Actor网络进行更新,以优化策略和评估价值。
将DDPG作为机械臂的轨迹跟踪控制器
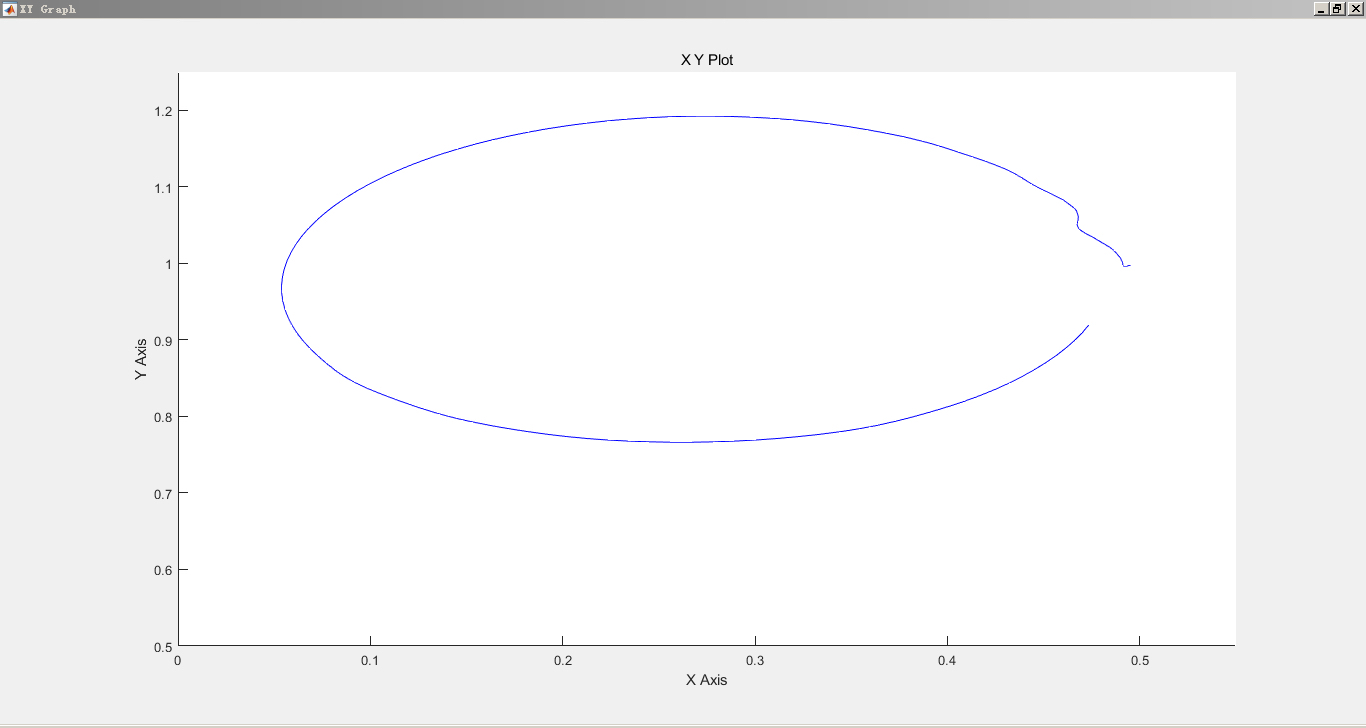
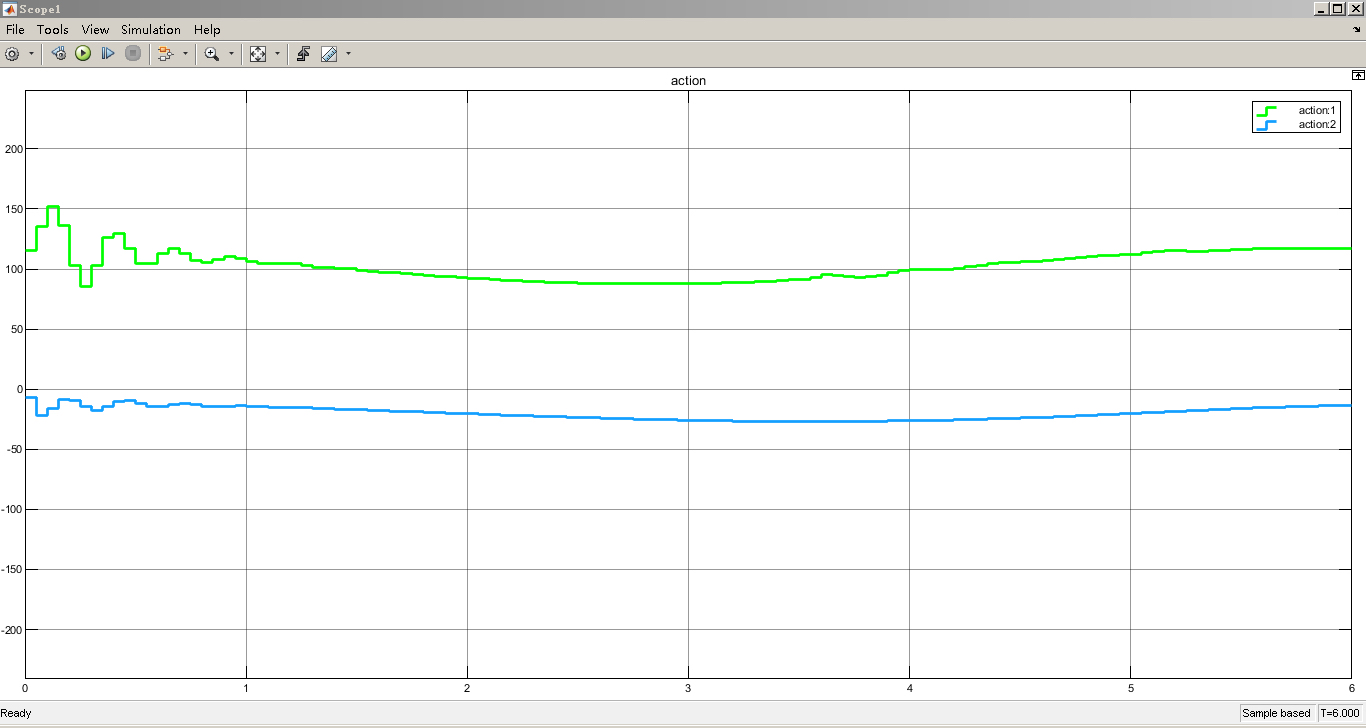
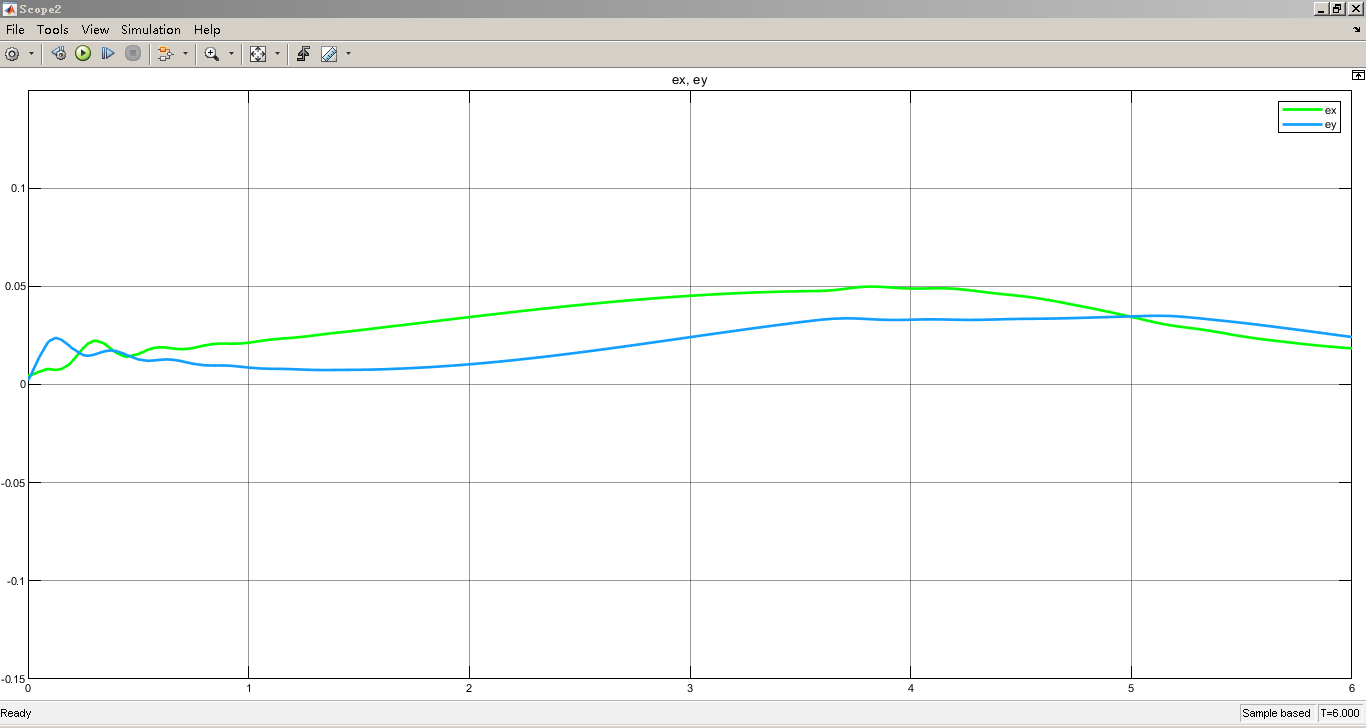
把DDPG应用到机械臂轨迹跟踪控制中,我们可以将机械臂的状态(如关节角度、角速度等)作为状态输入给DDPG的智能体,将智能体输出的动作映射为机械臂关节的控制信号,如扭矩或速度指令。目标则是最小化机械臂末端实际位置与期望轨迹位置之间的误差,以此作为奖励信号。例如:
def get_reward(actual_position, desired_position):
error = np.linalg.norm(actual_position - desired_position)
# 这里简单设计奖励,误差越小奖励越大
reward = -error
return reward通过不断训练,DDPG智能体可以学习到使机械臂尽可能跟踪期望轨迹的最优策略。
Simulink仿真
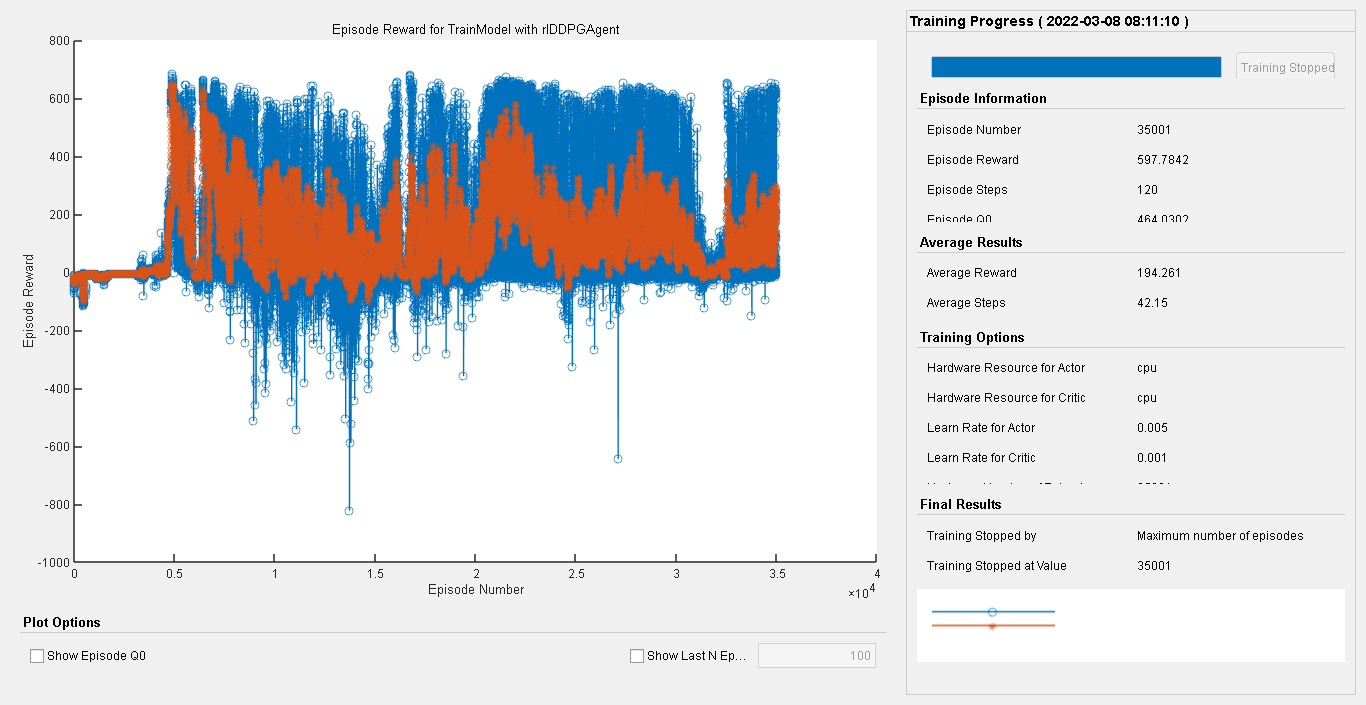
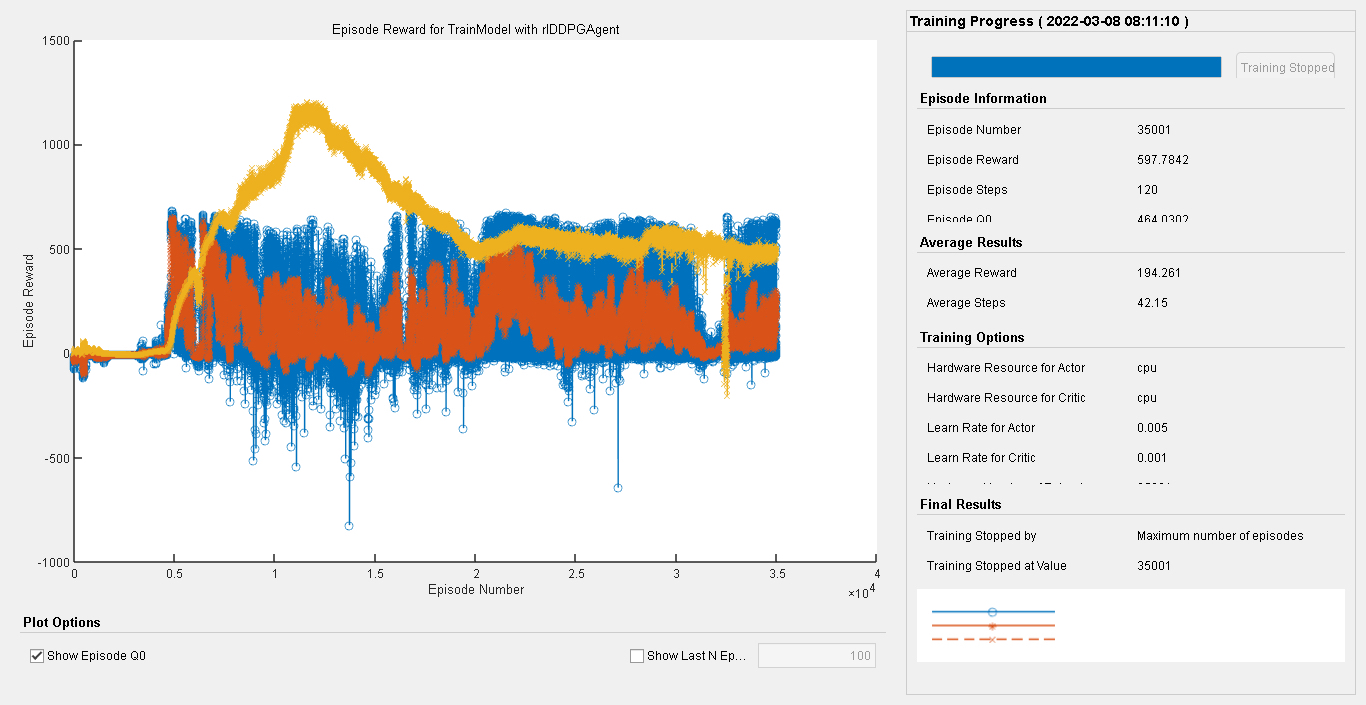
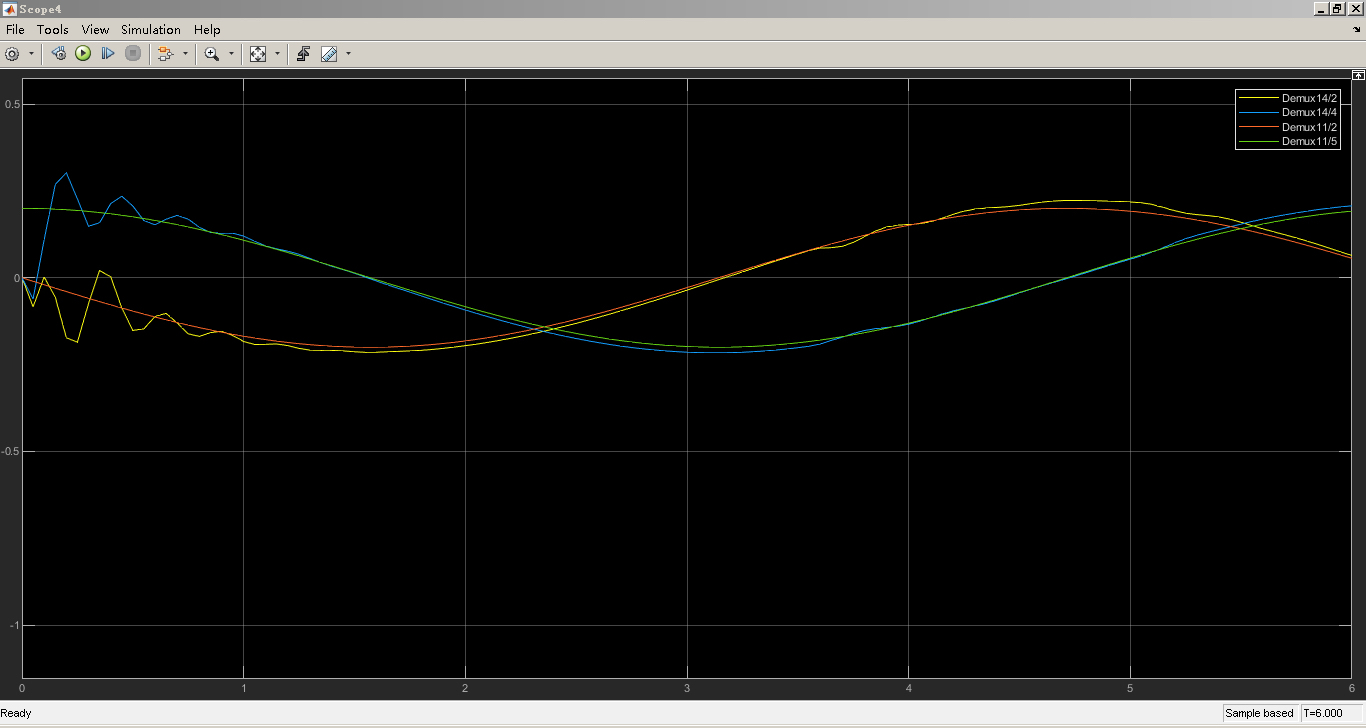
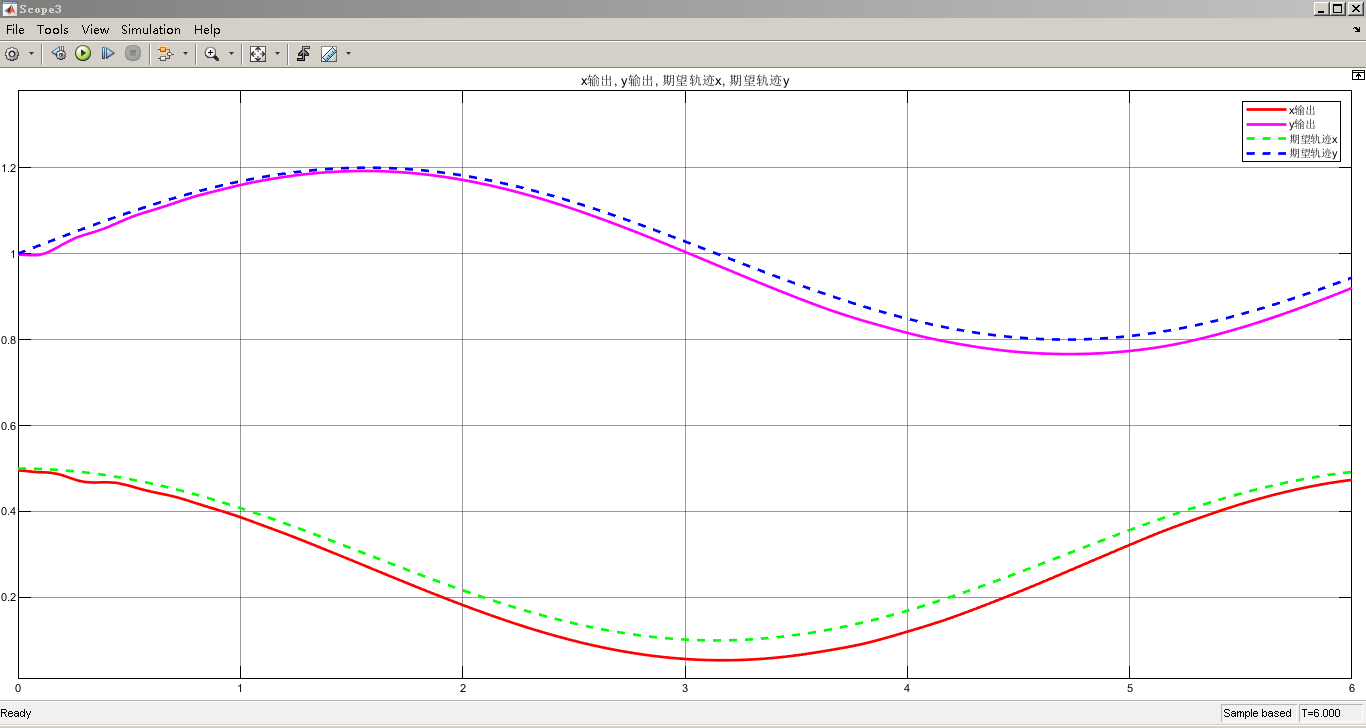
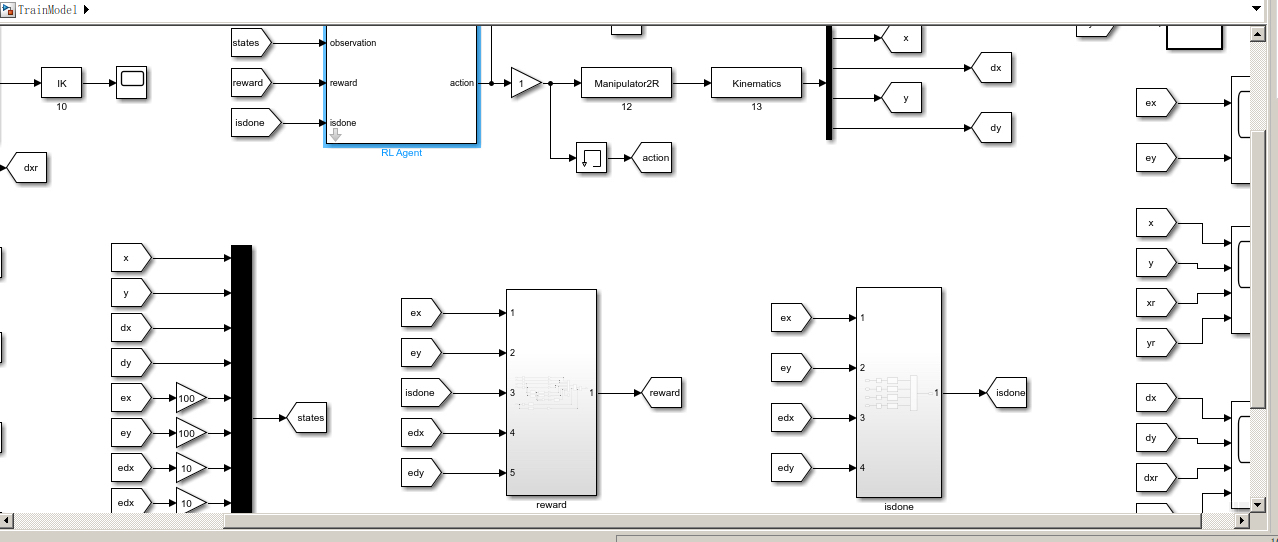
在Simulink中搭建机械臂模型进行轨迹跟踪仿真,可以直观地验证控制算法的有效性。首先,需要根据机械臂的动力学模型搭建物理模型,可使用Simscape Multibody等模块库。对于2自由度或6自由度机械臂,分别构建相应的关节和连杆结构。
然后,将基于DDPG算法生成的控制信号输入到机械臂模型中。可以通过MATLAB Function模块编写DDPG算法代码,与Simulink模型进行交互。在仿真过程中,观察机械臂末端位置与期望轨迹的贴合程度,通过调整DDPG算法的超参数(如学习率、折扣因子等)来优化控制效果。
通过从2自由度到6自由度机械臂的探索,结合强化学习DDPG算法以及Simulink仿真,我们为机械臂轨迹跟踪控制提供了一套完整的研究与实践方案,不断优化算法和模型,将有助于提升机械臂在实际应用中的性能。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)