工业AMR场景融合设计原理4——运行主时序和失败语义
二者结合,使得工业AMR系统不再是一个在理想实验室里演示的“玩具”,而是一个能够在复杂、混乱、真实的工业战场上,行为可预测、故障可定位、责任可追溯、能力可进化的“可靠战友”。重视这一讨论,才是构建真正鲁棒、可信的工业智能系统的坚实起点。在高度动态、充满不确定性的工业现场,一个自动移动机器人(AMR)系统的价值,并非体现于它在理想环境下的流畅运行,而在于当网络抖动、设施故障、人工介入、多系统冲突等状
在高度动态、充满不确定性的工业现场,一个自动移动机器人(AMR)系统的价值,并非体现于它在理想环境下的流畅运行,而在于当网络抖动、设施故障、人工介入、多系统冲突等状况必然发生时,它能否依然保持行为的可理解、可裁决与可恢复。实现这一目标的关键,在于系统是否具备一套清晰、严谨且被所有相关方共同认可的运行时行为“宪法”。这套“宪法”的核心组成部分,正是 “主时序”与“失败语义” 的明确定义。本文将深入剖析,为何在工业AMR的场景融合设计中,对此二者的讨论不是技术实现的细节,而是决定系统能否被成功交付、稳定运行和持续治理的基石性工程活动。
一、主时序:定义场景融合的“标准叙事”
主时序(创建→分配→下发→执行→确认→关闭)并非一个简单的任务状态机。它是一套强制性的、可证据化的叙事框架,用于回答一个根本问题:“一项任务,从意图产生到最终完结,其‘官方故事’应如何被讲述与验证?”
1. 意义一:建立跨系统共识的“时间轴”
在融合了WMS、MES、调度系统、多个车端及各类设施的场景中,每个参与方都有自己局部的、片段的视角。主时序为所有参与方提供了一个统一的、全局的叙事时间轴。它明确规定:
-
故事的开端(创建)必须与业务意图(外部单据)关联。
-
故事的章节(分配、下发、执行中的关键里程碑)必须留下“快照”(对象状态)和“旁白”(事件片段)。
-
故事的结局(关闭)必须是一个有据可查的、可裁决的结论(完成、取消或失败终止),而非简单的状态翻转。
这种共识避免了“盲人摸象”式的争议。当业务系统质问“任务为何延迟”,调度方可以依据“分配-下发”阶段的事件证据,指出是网络延迟或资源冲突;当现场反馈“车辆在工位停滞”,运维方可依据“执行-确认”阶段的证据,定位是交接信号缺失还是设施互锁失败。
2. 意义二:将连续性过程转化为可裁决的离散点
工业现场是连续的,但裁决需要确定的断点。主时序通过定义六大里程碑,将连续的任务执行过程,切割为一系列可观测、可测量、可取证的离散“检查点”。每个里程碑都对应着必须导出的最小证据集(事件片段和对象快照)。
-
这实现了“过程的可审计性”:验收或审计时,无需遍历海量日志,只需按图索骥,查验每个里程碑的证据包(EVP),即可复现任务全貌。
-
这支撑了“异常的精准定位”:故障发生时,可以迅速定位到是在哪个时序阶段“卡住”或“偏离”,极大缩短了问题诊断时间。
3. 意义三:为“完成”确立无可争议的工程定义
“任务是否完成”是现场最大的争议源。主时序通过确认和关闭两个阶段的严格区分与证据要求,为此提供了工程化解法:
-
确认:代表物理世界或逻辑世界达到了一个“可候选完成”的状态(如货物装卸完毕、回位到位)。此阶段必须提供完成候选证据。
-
关闭:代表系统在对所有证据(包括业务回执)进行对账与裁决后,作出的最终法律性结论。此结论必须引用确认阶段的证据,并可能包含对账结果。
这就将主观的“我觉得完成了”,转变为客观的“依据第X条规则和第Y份证据,系统裁决为完成”。
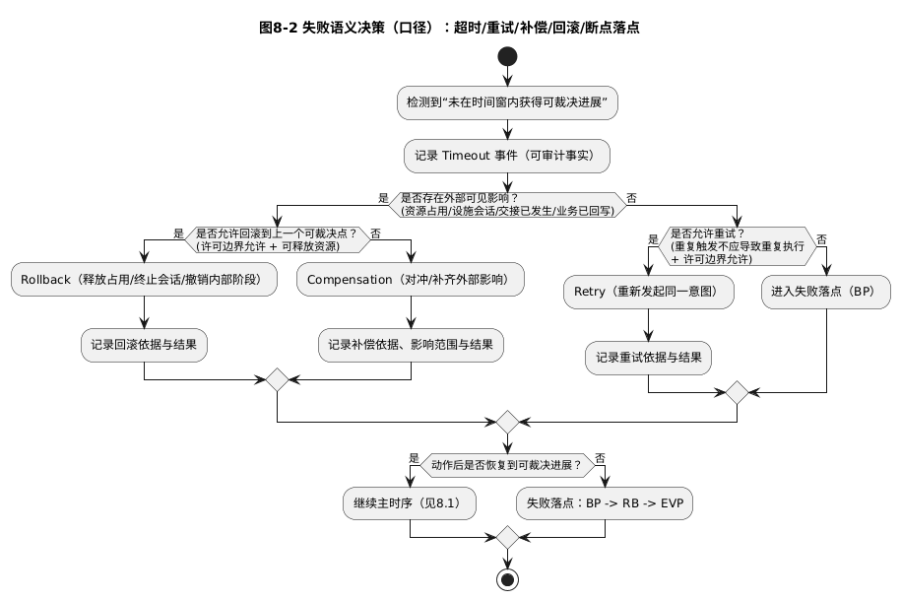
二、失败语义:定义场景失控后的“交战规则”
如果说主时序定义了“和平时期”的秩序,那么失败语义则定义了“战争时期”(发生异常)的交战规则与处理公约。它明确回答:当事情未按计划发展时,系统被允许做什么、禁止做什么、以及必须留下什么记录。
1. 意义一:将“重试”这一危险动作关进制度的笼子
不加区分的“自动重试”是分布式系统的万恶之源,极易导致重复执行、重复占用、重复写入等严重后果。失败语义对四种关键动作进行了严格区分和约束:
-
超时:仅是一个“事实判定”,而非动作指令。它必须被记录,但不能直接归因。
-
重试:必须满足 “重复触发不应导致重复执行” 的幂等性约束,且仅在未产生外部影响时方可考虑。
-
补偿:针对已产生外部可见影响(如占用资源、呼叫电梯)的“对冲”操作,必须严格记录依据和影响范围。
-
回滚:系统内部状态的退回,必须确保资源释放和证据链的完整。
这种区分防止了用技术便利性掩盖业务风险,迫使设计者在架构层面就考虑异常下的数据一致性和现场安全性。
2. 意义二:为人工介入划定清晰的权责边界
工业场景离不开人工介入(接管、恢复、紧急处置)。失败语义通过许可边界与这些动作绑定:
-
明确“谁”在“何时”有“何种”权限进行介入。
-
强制要求所有介入动作必须留下审计痕迹。
-
将人工动作也纳入标准化的“补偿”或“回滚”语义框架中进行管理。
这确保了人工干预不再是游离于系统之外的“黑箱操作”,而是可追溯、可复盘、可问责的标准化流程的一部分。
3. 意义三:构建从“故障”到“资产”的转化管道(BP→RB→EVP→REGT)
失败语义最深刻的意义,在于它不将失败视为终点,而是视为系统学习和治理的起点。它强制要求任何失败都必须稳定地“落点”到:
-
断点(BP):一个唯一编号和分类的故障条目,使模糊的“不好使”变成可管理的“BP-203”。
-
处置规程(RB):针对该BP的可执行操作手册。
-
回归验证清单(REGT):处置后必须通过的验收检查项。
-
证据包(EVP):包含此次失败全生命周期证据的档案。
这套机制实现了:
-
运维资产化:每一次故障处理都沉淀为可复用的知识(RB)。
-
回归标准化:确保“修复”不等于“恢复”,必须通过标准验证。
-
改进数据化:通过分析BP发生的频率和场景,为系统优化提供精准输入。
三、协同价值:主时序与失败语义共同编织的“安全网”
主时序与失败语义并非孤立存在,它们相互耦合,共同为场景融合编织了一张应对不确定性的“安全网”:
-
主时序定义了“正常路径”,失败语义定义了“异常分支”。二者共同构成了系统运行时行为的完整状态空间。
-
失败语义中定义的补偿/回滚等动作,其目标正是将系统从异常分支,尽可能地拉回主时序的某个可裁决里程碑。
-
主时序的里程碑证据要求,为失败语义中的动作(尤其是人工介入和补偿)提供了裁决依据和操作上下文。
结论:从“能跑”到“可信”的必由之路
在工业AMR的场景融合中,讨论主时序与失败语义,其终极意义在于推动系统设计哲学从关注 “功能实现”(能否跑起来) 向关注 “行为治理”(是否可信赖) 的深刻转变。
-
主时序,是对确定性的追求,它通过建立标准的、可验证的叙事框架,让系统的成功有据可查。
-
失败语义,是对不确定性的尊重与管理,它通过制定清晰的异常处理“交战规则”,让系统的失败可控、可治、可转化为财富。
二者结合,使得工业AMR系统不再是一个在理想实验室里演示的“玩具”,而是一个能够在复杂、混乱、真实的工业战场上,行为可预测、故障可定位、责任可追溯、能力可进化的“可靠战友”。忽略这一讨论,融合将建立在流沙之上;重视这一讨论,才是构建真正鲁棒、可信的工业智能系统的坚实起点。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 23
23 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)