基于动力学的六自由度机器人阻抗恒力跟踪控制在MATLAB中的实现
模型,基于动力学的六自由度机器人阻抗恒力跟踪控制实现,MATLAB代码,可完美运行供研究学习使用,附学习说明文档,零基础勿MATLAB,机器人动力学,恒力控制,六自由度在机器人研究领域,六自由度机器人的控制是一个热门话题,特别是涉及到恒力跟踪控制,对于很多实际应用场景如打磨、装配等至关重要。今天咱们就来聊聊基于动力学的六自由度机器人阻抗恒力跟踪控制在MATLAB中的实现过程。
模型,基于动力学的六自由度机器人阻抗恒力跟踪控制实现,MATLAB代码,可完美运行 供研究学习使用,附学习说明文档,零基础勿 MATLAB,机器人动力学,恒力控制,六自由度
在机器人研究领域,六自由度机器人的控制是一个热门话题,特别是涉及到恒力跟踪控制,对于很多实际应用场景如打磨、装配等至关重要。今天咱们就来聊聊基于动力学的六自由度机器人阻抗恒力跟踪控制在MATLAB中的实现过程。
一、背景知识
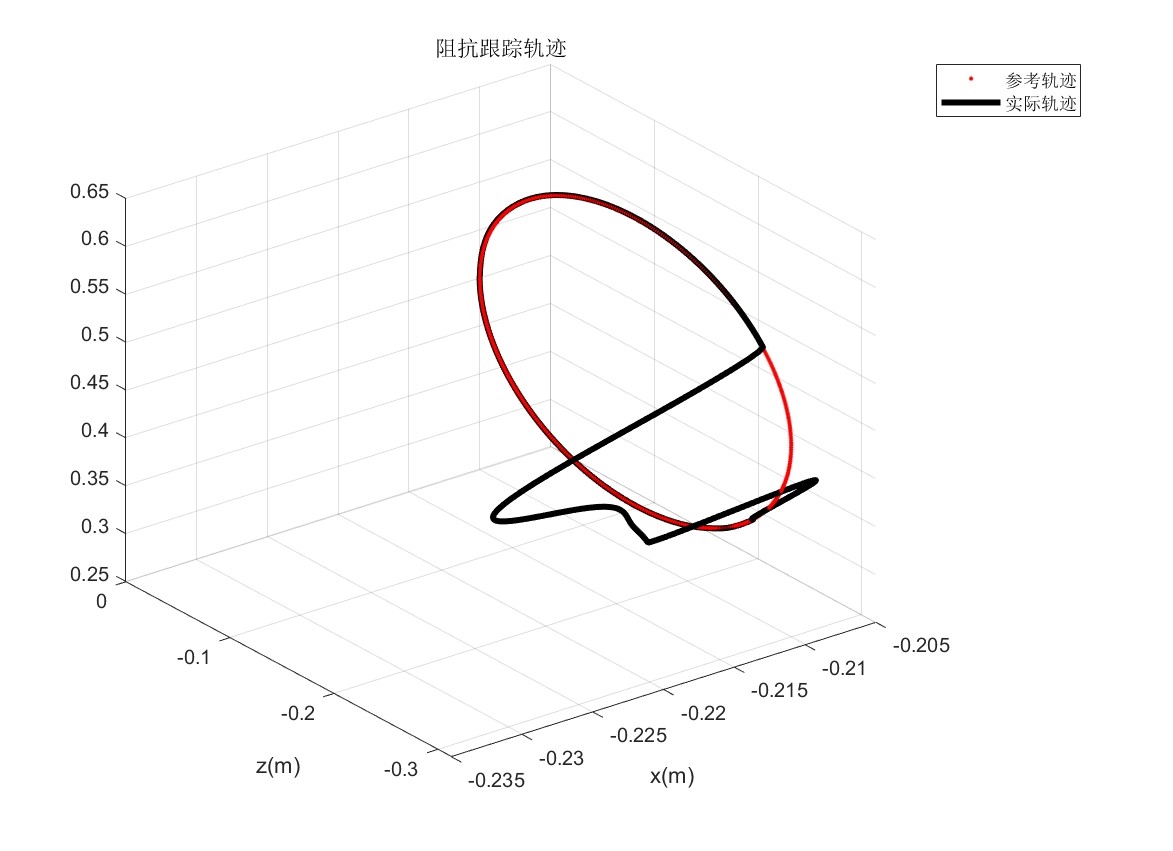
六自由度机器人,简单理解就是它在空间中有六个方向可以进行运动,分别是沿X、Y、Z轴的平移以及绕X、Y、Z轴的旋转。而动力学则是研究机器人运动与受力之间的关系,这对于精确控制机器人的动作必不可少。恒力控制呢,就是让机器人在执行任务时,与目标物体接触的力能够保持恒定,这在很多工业场景下非常关键,比如打磨一个零件,力太大可能磨过头,力太小又达不到预期效果。
二、MATLAB代码实现
% 定义机器人的参数,比如质量、惯性矩阵等
m = [1; 2; 3; 4; 5; 6]; % 各关节对应的质量
I = [1 0 0; 0 1 0; 0 0 1]; % 惯性矩阵示例,实际应用会更复杂
% 动力学模型的构建函数
function [M, C, G] = robot_dynamics(q, q_dot)
% 这里根据机器人的具体结构和物理参数来计算惯性矩阵M、科里奥利力和离心力矩阵C以及重力向量G
% 以简单的方式示意,实际需要根据机器人运动学详细推导
M = eye(6);
C = zeros(6);
G = zeros(6, 1);
end
% 阻抗控制算法部分
function tau = impedance_control(q, q_dot, F_d)
% 期望力F_d
Kp = 10 * eye(6); % 比例增益矩阵
Kd = 2 * eye(6); % 微分增益矩阵
[M, C, G] = robot_dynamics(q, q_dot);
% 计算期望加速度
q_ddot_d = M \ (F_d - C * q_dot - G);
tau = M * (Kp * (q_d - q) + Kd * (-q_dot)) + C * q_dot + G;
end
% 模拟部分
% 初始化参数
q = zeros(6, 1); % 关节角度初始值
q_dot = zeros(6, 1); % 关节角速度初始值
time_step = 0.01; % 时间步长
total_time = 10; % 总模拟时间
num_steps = total_time / time_step;
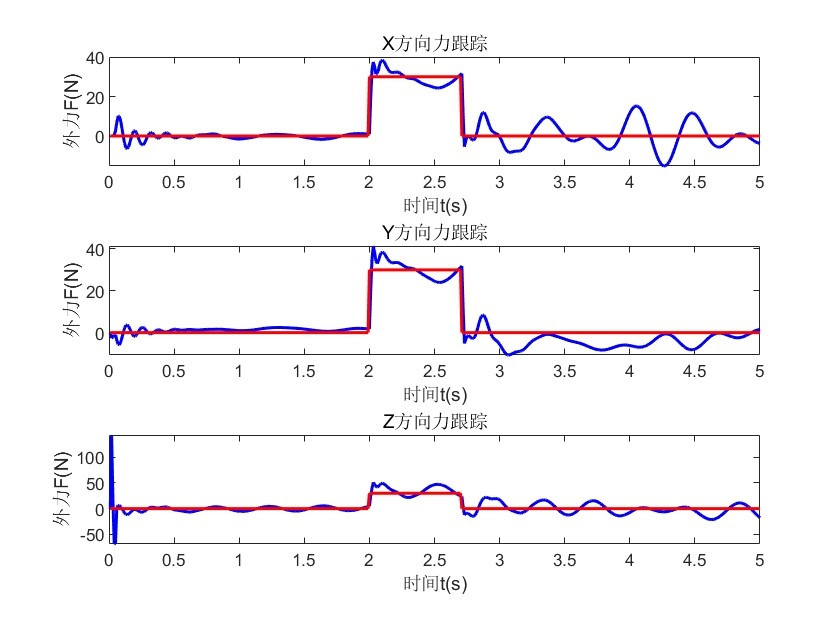
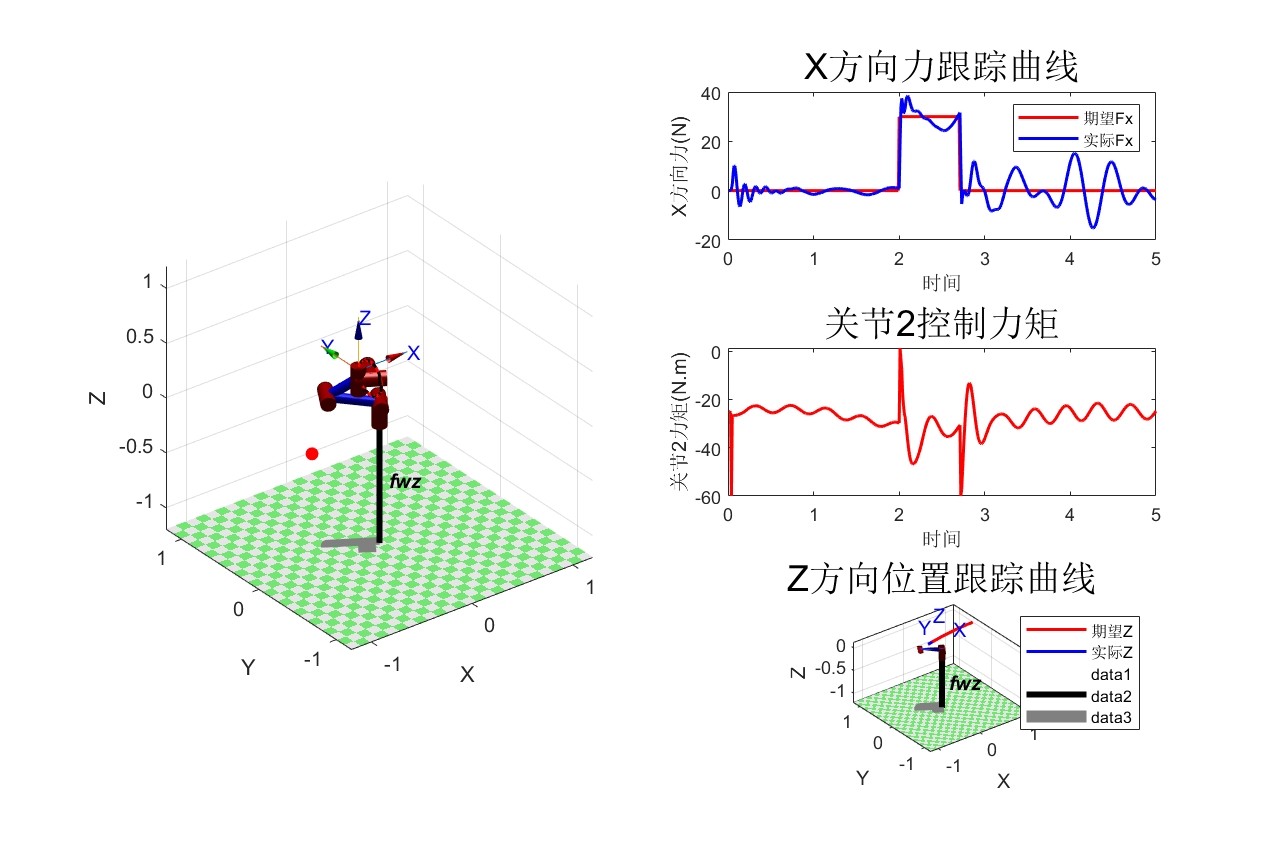
F_d = [10; 0; 0; 0; 0; 0]; % 期望力,这里假设沿X轴方向10N
for i = 1:num_steps
tau = impedance_control(q, q_dot, F_d);
% 根据动力学方程更新关节角度和角速度,简单示意使用欧拉法
[M, ~, ~] = robot_dynamics(q, q_dot);
q_ddot = M \ (tau);
q_dot = q_dot + q_ddot * time_step;
q = q + q_dot * time_step;
end代码分析
- 参数定义部分:一开始我们定义了机器人的一些基本参数,像各关节的质量
m和惯性矩阵I。这些参数在后续构建动力学模型时会用到,虽然这里给的是比较简单的示例,实际中这些参数需要根据机器人的具体物理结构准确测量或计算得出。 - 动力学模型函数
robot_dynamics:这个函数用来计算机器人的惯性矩阵M、科里奥利力和离心力矩阵C以及重力向量G。这里只是简单示意返回了一些基本矩阵,在实际应用中,要根据机器人的运动学详细推导这些矩阵的计算公式,不同的机器人结构推导过程差异很大。 - 阻抗控制算法函数
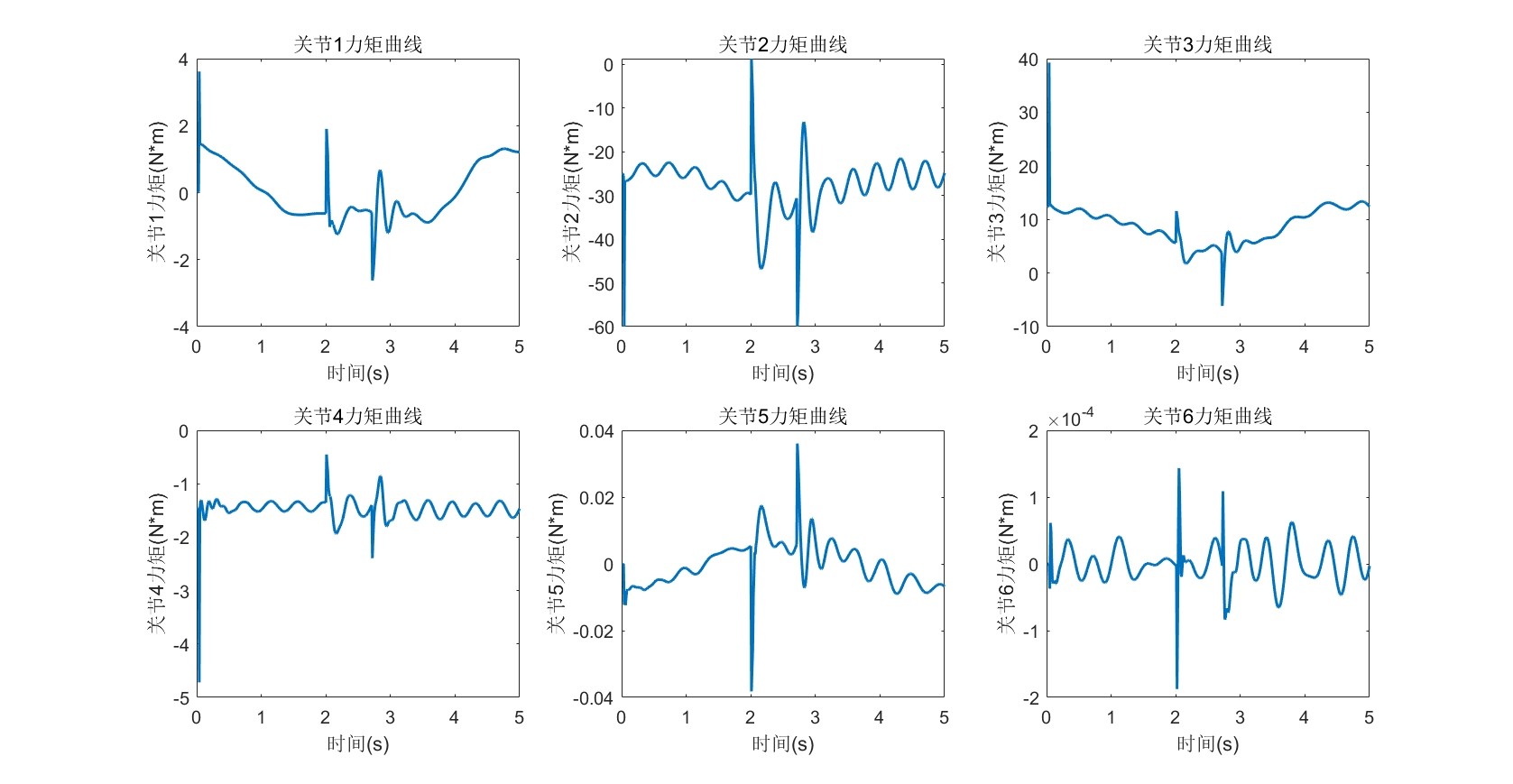
impedancecontrol:此函数实现了阻抗控制算法。通过期望力Fd以及设定的比例增益矩阵Kp和微分增益矩阵Kd,结合动力学模型计算出控制力矩tau。期望加速度qddotd的计算是基于动力学方程,然后根据控制理论得出控制力矩。 - 模拟部分:在这部分,我们初始化了关节角度
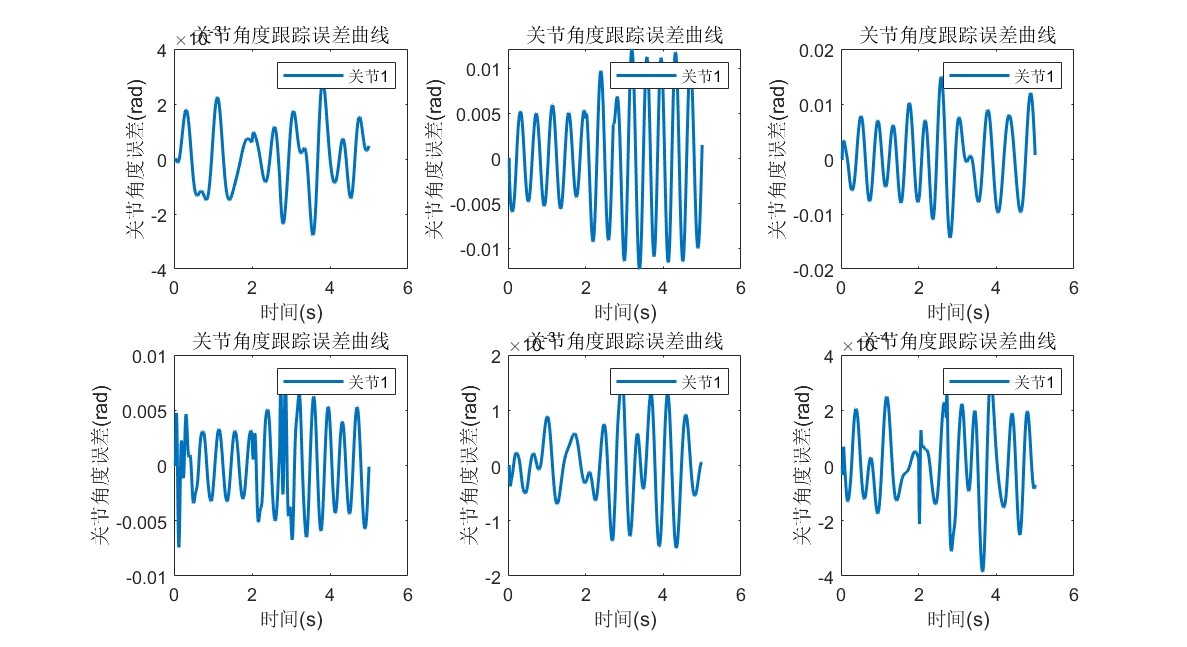
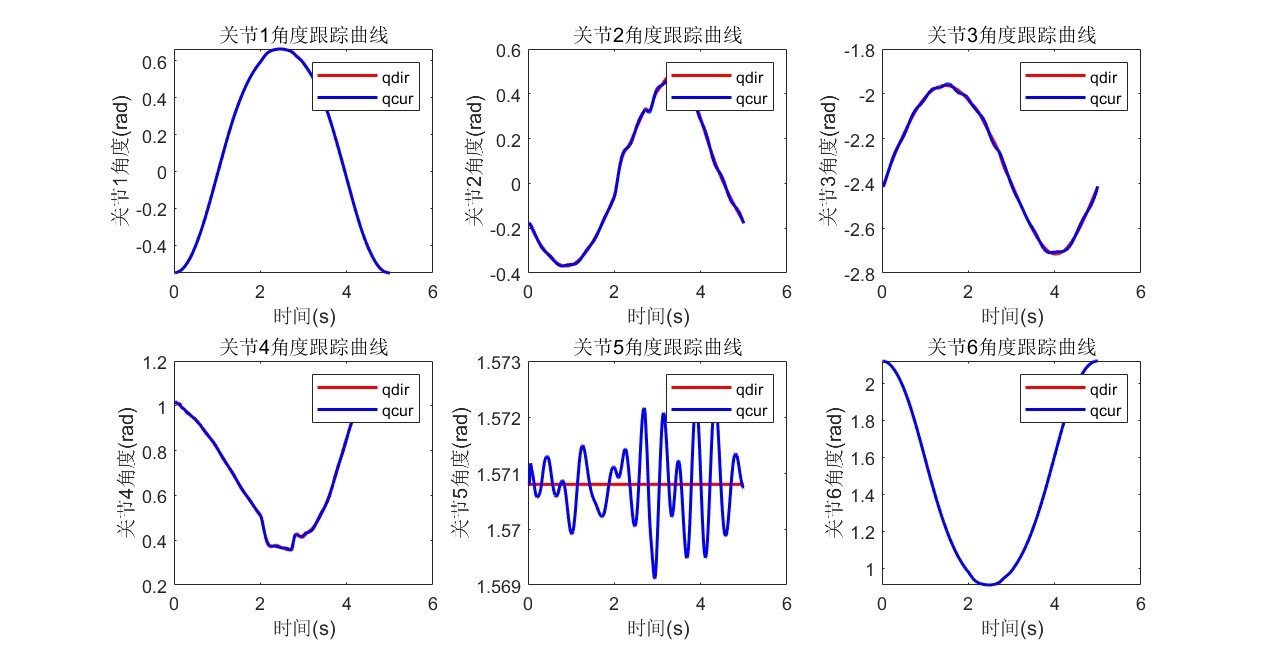
q、关节角速度q_dot等参数。通过一个循环,在每个时间步长内,先根据阻抗控制算法计算出控制力矩tau,然后利用动力学方程和简单的欧拉法更新关节角度和角速度,模拟机器人的运动过程。
三、学习说明文档
这份代码和实现主要是供研究学习使用,对于零基础的朋友可能不太友好。在学习之前,需要对MATLAB编程有一定的了解,至少要熟悉矩阵运算、函数定义等基础内容。同时,要对机器人动力学和运动学有比较深入的认识,比如知道如何推导机器人的动力学方程,理解各种力和力矩在机器人运动中的作用。另外,阻抗控制的原理也需要掌握,明白比例增益和微分增益是如何影响控制效果的。
模型,基于动力学的六自由度机器人阻抗恒力跟踪控制实现,MATLAB代码,可完美运行 供研究学习使用,附学习说明文档,零基础勿 MATLAB,机器人动力学,恒力控制,六自由度
总之,基于动力学的六自由度机器人阻抗恒力跟踪控制是一个比较复杂但非常有趣和实用的领域,通过MATLAB的模拟和实现,我们可以更好地理解和研究其中的原理与应用。希望大家在研究过程中不断探索,发现更多有趣的应用和优化方法。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)