A星算法路径规划系统代码功能说明
路径规划算法仿真 A星算法 传统A*(Astar)算法+改进后的A*算法 Matlab代码 可以固定栅格地图与起点终点 可以进行定量比较 改进: ①提升搜索效率(引入权重系数) ②冗余拐角优化(可显示拐角优化次数) ③路径平滑处理(引入梯度下降算法配合S-G滤波器) 代码含注释!
一、系统概述
A星算法路径规划系统是一套基于Matlab开发的栅格地图路径规划解决方案,支持随机环境生成、自定义起点终点、路径搜索与优化、结果可视化等全流程功能。系统通过模块化设计,实现了传统A星算法与改进型A星算法的灵活切换,可应用于机器人导航、游戏场景路径生成、物流路径规划等多种场景。
路径规划算法仿真 A星算法 传统A*(Astar)算法+改进后的A*算法 Matlab代码 可以固定栅格地图与起点终点 可以进行定量比较 改进: ①提升搜索效率(引入权重系数) ②冗余拐角优化(可显示拐角优化次数) ③路径平滑处理(引入梯度下降算法配合S-G滤波器) 代码含注释!
系统核心优势在于:
- 环境可配置性:支持自定义栅格尺寸、障碍物比例,可重复调用历史环境或生成新环境
- 算法灵活性:提供传统A星与加权A星两种搜索模式,支持启发函数权重动态调整
- 路径优化能力:具备拐角修正与B样条曲线平滑功能,提升路径实用性
- 可视化交互:实时展示路径搜索过程,通过色彩编码呈现代价分布,支持结果导出
- 状态反馈:通过音频提示与文本输出,告知路径搜索成功或失败状态
二、核心功能模块
(一)环境生成模块
环境生成模块负责创建栅格地图的基础数据,包括障碍物分布、起点与终点初始化,为路径搜索提供基础环境。
1. 核心功能
- 栅格尺寸定义:支持10x10至100x100等不同规模的栅格地图,通过参数修改可适配不同场景需求
- 障碍物随机生成:根据设定的障碍物比例(如40%),在栅格中随机分布不可通行区域,障碍物以无穷大代价标记
- 起点终点管理:支持两种模式:
- 随机生成:系统自动在非障碍物区域分配起点(标记为“S”)与终点(标记为“G”)
- 手动指定:通过索引值精确设置起点终点位置,同时自动校验位置合法性(确保非障碍物区域)
- 环境数据持久化:生成的环境数据(包括栅格代价矩阵、起点终点索引、障碍物分布)可保存至本地,支持后续重复调用,避免重复生成相同环境
2. 关键特性
- 障碍物生成算法采用均匀随机分布,确保环境复杂度可控
- 起点终点生成时内置冲突检测,避免与障碍物重叠
- 环境数据采用矩阵与元胞数组结合的存储方式,兼顾访问效率与数据完整性
(二)路径搜索模块
路径搜索模块是系统的核心,基于A星算法原理实现从起点到终点的最优路径搜索,包含传统A星与加权A星两种实现方案。
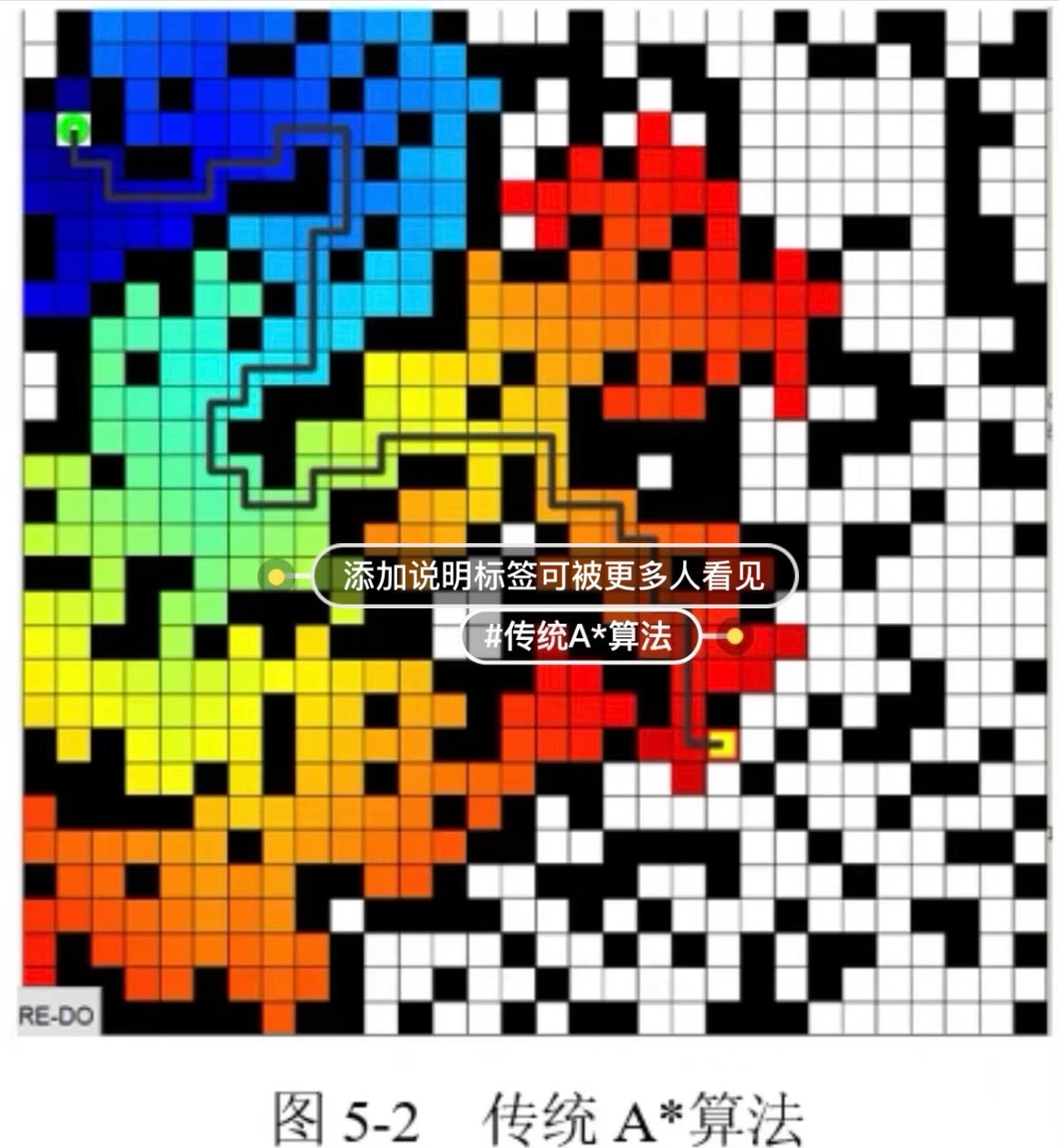
1. 传统A星算法实现
- 核心逻辑:通过维护OpenList(待探索节点集)与ClosedList(已探索节点集),迭代计算节点的代价函数
f(n)=g(n)+h(n)(g(n)为起点到当前节点的实际代价,h(n)为当前节点到终点的启发代价),每次选择f(n)最小的节点进行拓展,直至找到终点或确认无解。 - 启发函数:支持欧几里得距离(Euclidean)与曼哈顿距离(Taxicab)两种计算方式,默认采用曼哈顿距离以适配栅格地图的四向移动(上下左右)特性
- 节点拓展规则:对当前节点的四个相邻节点(上、下、左、右)进行合法性校验,排除超出边界、障碍物区域、已探索节点后,计算其代价并加入待探索节点集
- 代价更新机制:当发现已有节点的新路径代价更低时,自动更新该节点的代价与父节点指针,确保路径最优性
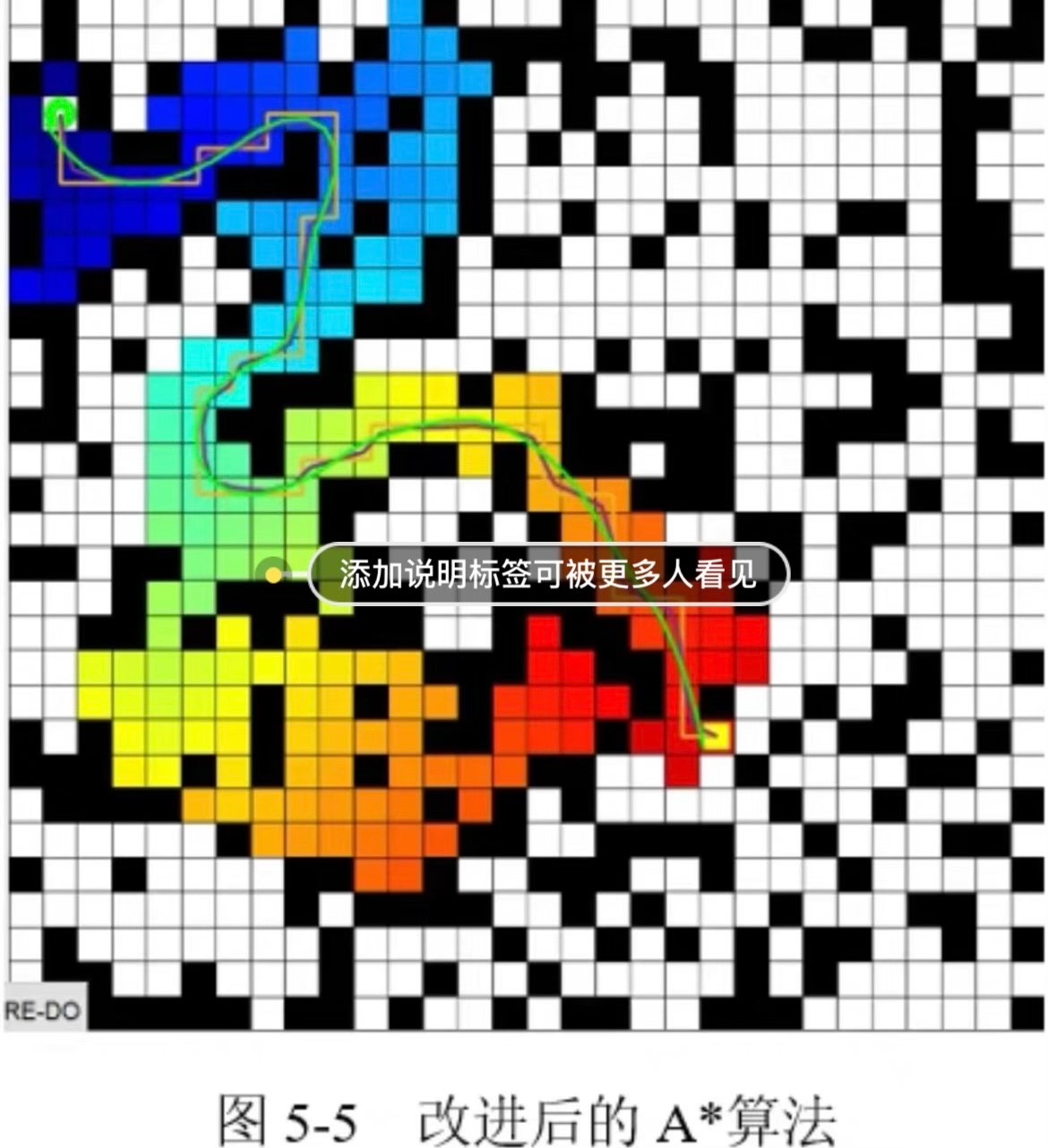
2. 加权A星算法改进
- 权重动态调整:引入启发函数权重系数(如2.0),将代价函数调整为
f(n)=g(n)+Weights*h(n),通过增大启发函数权重,提升搜索效率(减少探索节点数量),适用于对搜索速度要求较高的场景 - 权衡机制:权重系数可根据需求调整,权重越小越接近Dijkstra算法(保证最优路径),权重越大搜索速度越快但可能牺牲部分路径最优性
- 兼容性设计:加权A星算法与传统A星算法共享底层节点管理逻辑,通过参数开关实现无缝切换
(三)路径优化模块
路径优化模块针对A星算法原生输出的折线路径进行优化,提升路径的平滑性与实用性,解决实际应用中(如机器人运动)的转向频繁问题。
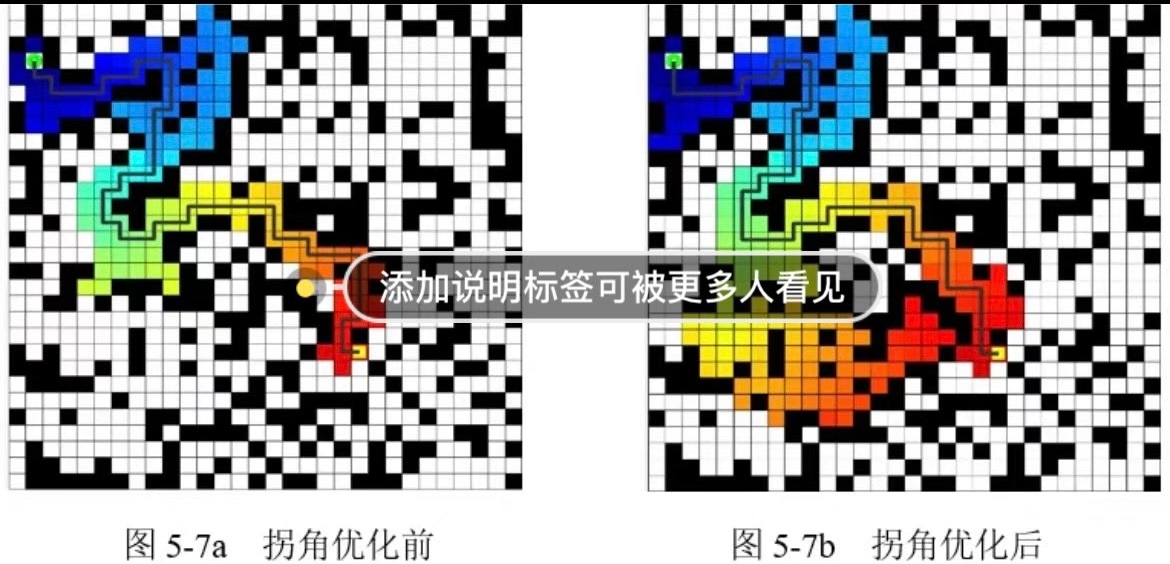
1. 拐角修正功能
- 优化目标:减少路径中的无效拐角,在保证路径长度不变的前提下,使路径更接近直线运动
- 核心逻辑:
1. 跟踪节点父子关系,分析路径中的转向方向
2. 计算"期望节点"(即保持当前运动方向的下一个节点)
3. 校验期望节点的合法性(是否在待探索节点集中、是否为障碍物)
4. 若期望节点合法且代价与原节点一致,则替换原节点为期望节点,实现拐角消除 - 修正计数:系统自动记录拐角修正次数,便于评估优化效果
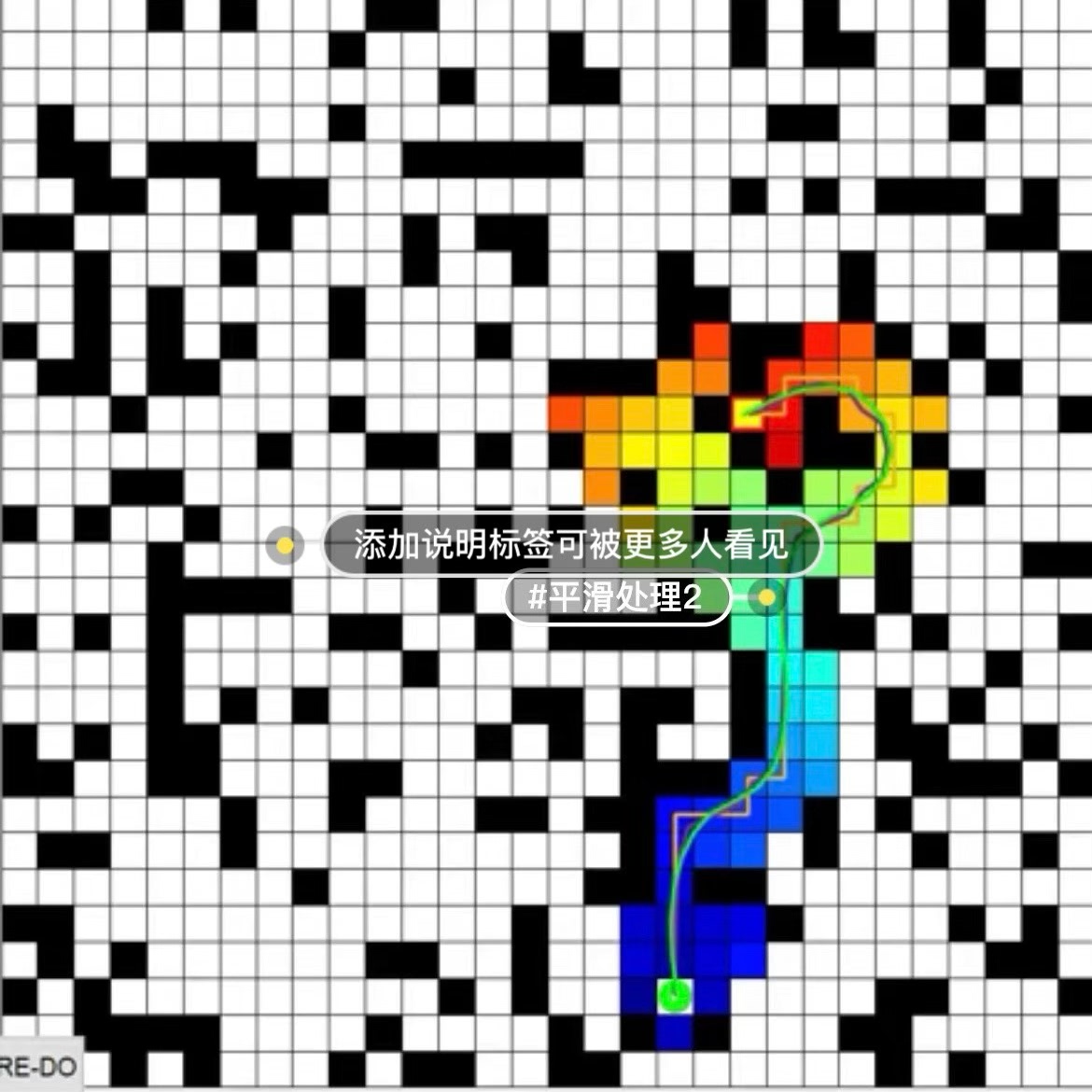
2. B样条曲线平滑
- 功能定位:针对优化后的折线路径,进一步进行曲线拟合,生成连续平滑的路径
- 实现原理:
1. 提取路径中的关键节点作为B样条曲线的控制点
2. 采用3阶B样条算法,通过节点矢量计算曲线参数
3. 生成高密度的路径点,确保曲线连续性与平滑性 - 优势:平滑后的路径无尖锐拐角,满足机器人运动学约束,减少机械损耗与运动时间
(四)可视化与交互模块
可视化与交互模块负责将路径搜索过程与结果以直观的方式呈现,帮助用户理解算法运行机制与路径规划效果。
1. 实时搜索可视化
- 色彩编码:通过不同颜色呈现节点状态:
- 障碍物区域:以固定颜色标记(如深红色)
- 待探索节点(OpenList):根据代价大小呈现渐变色,代价越小颜色越浅
- 已探索节点(ClosedList):以中性色标记,区分于待探索节点
- 起点与终点:分别以绿色(起点)与黄色(终点)特殊标记,便于识别
- 动态更新:每轮节点拓展后自动刷新可视化界面,展示当前搜索进度,支持实时观察算法收敛过程
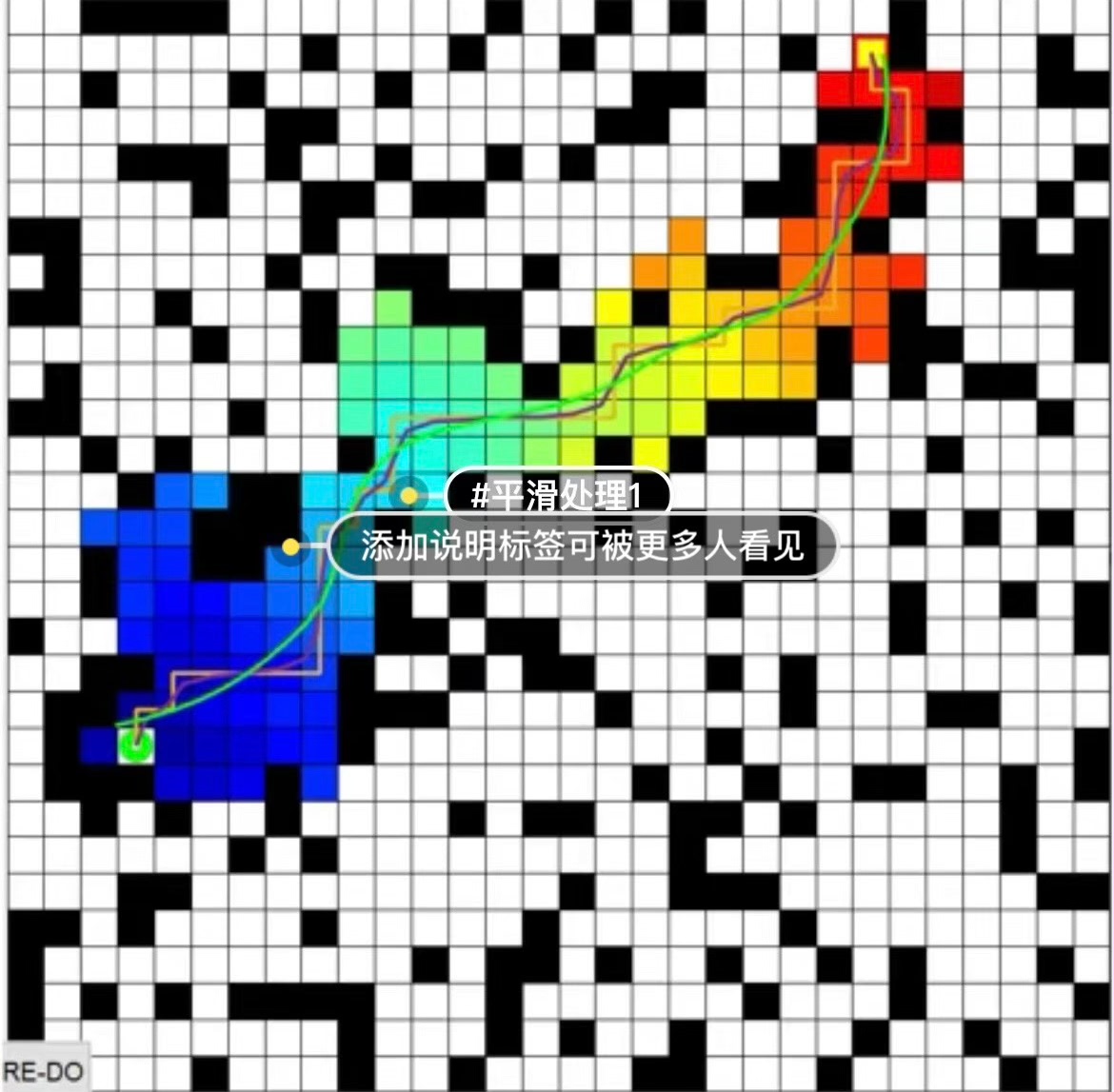
2. 结果展示
- 路径绘制:搜索完成后,以加粗线条绘制最优路径,传统路径与优化后路径采用不同颜色区分(如深灰色与紫色)
- 平滑路径叠加:B样条平滑后的路径以绿色曲线叠加展示,直观对比优化前后效果
- 参数显示:支持在界面中显示关键参数,如路径总长度、搜索节点数量、优化次数等
3. 交互控制
- 环境重置:提供"重新生成"按钮,支持一键重置环境并重新启动路径搜索
- 参数调整:通过配置文件或界面输入,修改栅格尺寸、障碍物比例、权重系数等关键参数
- 状态反馈:
- 文本输出:在命令行窗口显示"路径找到(Solution found!)"或"无可行路径(No Solution!)"
- 音频提示:搜索完成后自动播放指定音频文件,无需人工监控搜索状态
三、系统工作流程
(一)基础流程(传统A星算法)
- 初始化阶段:
- 清除历史数据与界面缓存
- 配置栅格尺寸、障碍物比例等参数
- 生成或加载环境数据(障碍物、起点、终点)
- 初始化OpenList(加入起点,代价设为0)与ClosedList(空集)
- 创建可视化窗口,绘制初始环境
- 路径搜索阶段:
- 从OpenList中选择代价函数最小的节点
- 将该节点移至ClosedList,标记为已探索
- 拓展该节点的四个相邻节点,计算各节点的实际代价与启发代价
- 对合法节点进行代价更新与列表管理(加入OpenList或更新已有节点代价)
- 刷新可视化界面,更新节点颜色与代价分布
- 重复上述步骤,直至OpenList为空(无解)或找到终点(有解)
- 结果处理阶段:
- 若找到终点:调用路径回溯函数,从终点反向推导至起点,生成完整路径;绘制路径并播放成功音频
- 若无解:输出无可行路径提示,播放失败音频
- 保存搜索结果(路径节点、代价矩阵)供后续分析
(二)改进流程(加权A星+路径优化)
- 加权搜索阶段:在基础流程的路径搜索阶段,引入权重系数,调整代价函数计算方式,提升搜索效率
- 拐角修正阶段:路径回溯完成后,启动拐角修正算法,消除无效拐角,生成优化后的折线路径
- 曲线平滑阶段:提取优化后路径的关键节点,通过B样条算法生成平滑曲线,完成最终路径优化
- 对比展示:在可视化界面中同时展示原始路径、优化后折线路径、平滑曲线路径,直观呈现优化效果
四、关键技术特性
(一)数据结构设计
- 代价矩阵:采用二维矩阵存储每个栅格的通行代价,障碍物以无穷大标记,起点代价设为0
- 节点指针数组:通过元胞数组存储每个节点的父节点方向(上、下、左、右),用于路径回溯
- 列表管理:OpenList与ClosedList采用动态数组实现,支持高效的节点插入、删除与查找操作,确保算法时间复杂度可控
(二)算法稳定性保障
- 边界校验:所有节点拓展操作均包含边界检测,避免数组越界错误
- 冲突检测:起点终点生成时自动校验是否与障碍物重叠,确保初始状态合法性
- 异常处理:针对OpenList为空(无解)、节点索引异常等情况,设计专门的异常处理逻辑,保证系统稳定运行
(三)可扩展性设计
- 模块化架构:各功能模块(环境生成、路径搜索、优化、可视化)独立封装,支持单独修改与替换
- 接口标准化:模块间通过标准化接口交互,如环境数据采用固定格式的结构体传递,便于后续接入新算法(如Dijkstra、RRT*)
- 参数化配置:核心参数(如栅格尺寸、权重系数、障碍物比例)均通过配置项管理,无需修改代码即可适配不同场景
五、应用场景与使用建议
(一)典型应用场景
- 机器人导航:适用于室内移动机器人(如AGV)的路径规划,通过拐角修正与曲线平滑,满足机器人运动学需求
- 游戏开发:为游戏角色提供智能寻路功能,加权A星算法可平衡寻路效率与路径最优性
- 物流路径规划:在仓储环境中,为货物搬运设备规划最优路径,减少运输时间与能耗
- 仿真实验:用于算法研究与教学,可直观展示A星算法的工作原理与改进效果
(二)使用建议
- 参数配置:
- 小规模栅格(如20x20):适合算法调试与演示,搜索速度快
- 大规模栅格(如100x100):建议使用加权A星算法,权重系数设为1.5-2.0,平衡速度与精度
- 障碍物比例:根据场景需求调整,一般建议30%-50%,过高可能导致无解,过低则失去算法验证意义
- 优化功能选择:
- 对路径平滑性要求低的场景(如游戏寻路):可关闭B样条平滑,仅启用拐角修正
- 对运动精度要求高的场景(如机器人导航):建议同时启用拐角修正与B样条平滑
- 环境复用:
- 进行算法对比实验时,建议保存相同环境数据,确保实验条件一致
- 频繁测试同一场景时,加载历史环境可减少重复计算,提升效率
六、系统限制与改进方向
(一)当前限制
- 移动方向仅支持四向(上下左右),不支持八向(含对角线)移动
- 启发函数仅提供曼哈顿距离与欧几里得距离,未支持更复杂的场景适配(如地形代价加权)
- 路径平滑仅支持B样条算法,未提供其他平滑算法(如贝塞尔曲线)的选择
- 可视化界面未支持交互操作(如鼠标点击修改障碍物、拖动起点终点)
(二)改进方向
- 扩展移动方向:增加八向移动模式,适配更多场景需求
- 丰富启发函数:引入地形代价因子,支持不同区域的通行代价差异化
- 优化算法选择:增加动态权重调整机制,根据搜索进度自动调整权重系数
- 增强交互能力:开发图形化交互界面,支持鼠标编辑环境、实时参数调整
- 性能优化:采用更高效的数据结构(如优先队列)管理OpenList,提升大规模栅格的搜索速度
七、总结
A星算法路径规划系统通过模块化设计与工程化实现,将经典的A星算法转化为可直接应用的解决方案。系统不仅实现了路径搜索的核心功能,还通过环境配置、算法改进、路径优化、可视化交互等功能,提升了系统的实用性与易用性。无论是算法研究、教学演示,还是实际场景应用,该系统都能提供稳定、高效的路径规划服务,为相关领域的开发与研究提供有力支持。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 8
8 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)