基于二次规划的路径规划与速度规划:从MATLAB到C++的实践
通过这次实践,我对基于QP的路径规划和速度规划有了更深入的理解。从MATLAB的快速验证到C++的高效实现,再到QT的可视化展示,整个过程让我体会到了理论与实践的结合。优化QP求解器:目前的C++实现虽然能满足基本需求,但在大规模数据下的效率还有提升空间。增加更多约束条件:比如考虑车辆的动力学特性,或者更复杂的避障条件。改进可视化界面:增加更多的交互功能,比如动态调整参数并实时更新结果。总之,这是
基于二次规划(QP)的路径规划和速度规划 matlab代码实现 + 详细文档 picewise jerk path picewise jerk speed 更新: c++版本已完成,qt可视化。
最近在做一个关于路径规划和速度规划的项目,主要基于二次规划(QP)的方法。虽然之前对QP有所了解,但真正实现起来还是遇到了不少问题。好在经过一段时间的努力,终于完成了MATLAB的验证和C++的实现,并且用QT做了一个简单的可视化界面。下面分享一下我的学习和实践过程。
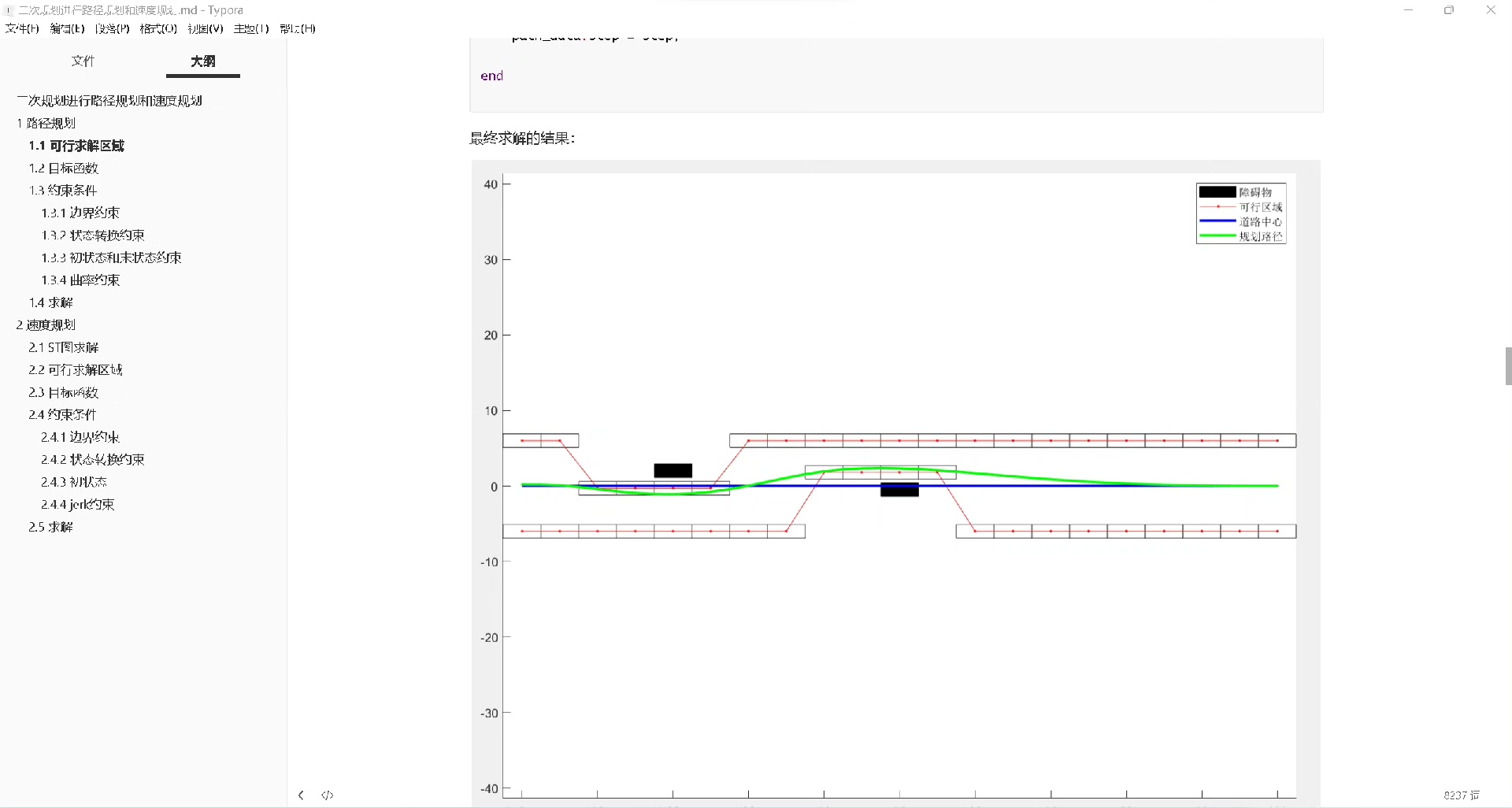
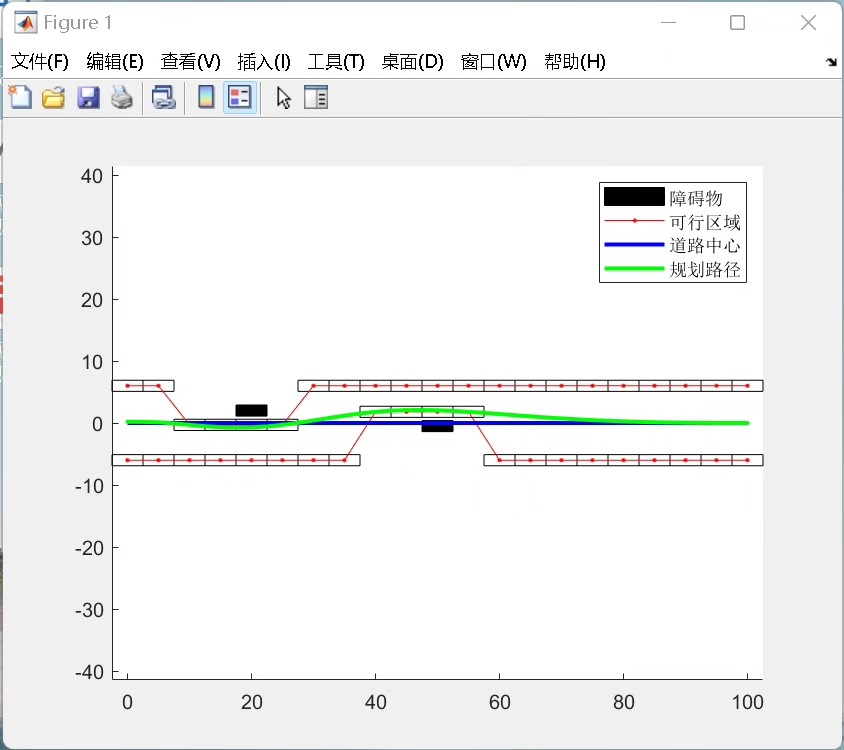
1. 路径规划:从理论到代码
路径规划是自动驾驶和机器人导航中的核心问题。二次规划(QP)是一种常用的方法,它可以通过优化目标函数来找到满足约束条件的最优路径。
QP的基本思想
QP的优化目标通常是路径的平滑性和安全性。比如,我们希望路径尽可能平滑,同时避开障碍物。数学上,QP可以表示为:
$$
\min_{x} \quad \frac{1}{2}x^T Q x + c^T x \\
\text{s.t.} \quad A x \leq b \\
$$
其中,$x$是决策变量(比如路径点的位置),$Q$是一个正定矩阵,决定了优化的目标函数形式。
MATLAB实现
MATLAB的优化工具箱提供了quadprog函数,可以方便地求解QP问题。下面是一个简单的路径规划示例代码:
% 定义QP问题
n = 10; % 路径点数
Q = eye(n); % 简单的平滑性目标
c = zeros(n,1); % 无偏置项
% 添加约束条件(比如路径必须在某个区域内)
A = [ones(1,n); -ones(1,n)];
b = [10; -5]; % 路径必须在y=5到y=10之间
% 求解QP
x = quadprog(Q, c, A, b);
% 可视化结果
plot(x, 'b-o');
title('QP路径规划结果');
xlabel('点编号');
ylabel('位置');这段代码虽然简单,但展示了QP的基本用法。实际应用中,约束条件会更复杂,比如需要考虑避障、路径长度等因素。
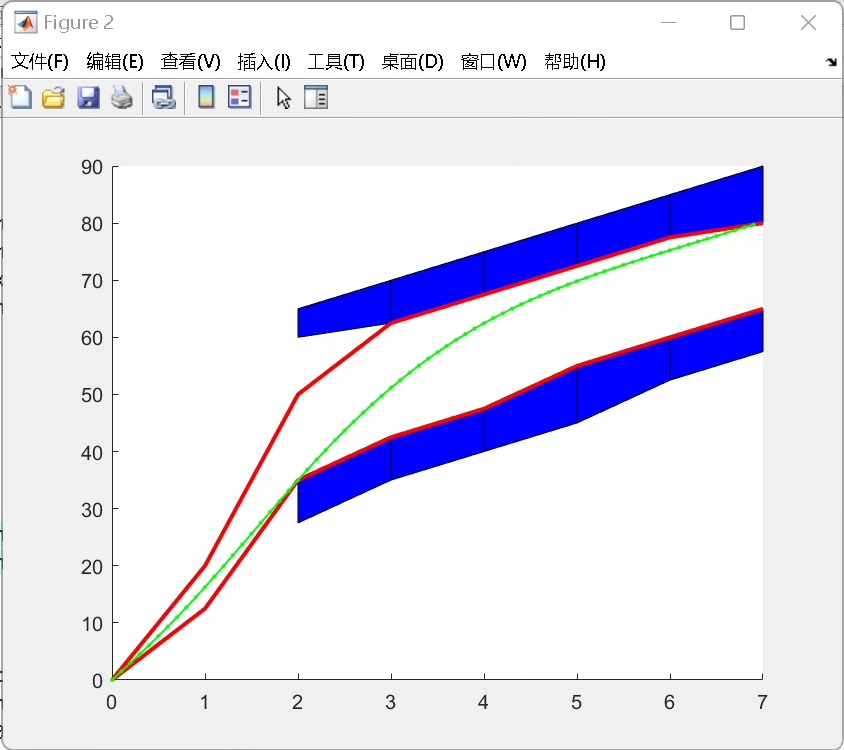
2. 速度规划:平滑性与实时性
速度规划的目标是为路径上的每个点分配一个合适的速度,使得整体运动尽可能平滑,同时满足安全性和舒适性要求。这里我们采用分段 jerk(加加速度)的方法。
分段 jerk 的意义
Jerk是加速度的变化率,反映的是加速度的平滑性。在实际应用中,过大的jerk会导致乘坐不舒适,因此需要对jerk进行约束。
分段 jerk 的方法是将路径划分为多个小段,在每段内保持jerk恒定。这种方法可以在保证平滑性的同时,降低计算复杂度。
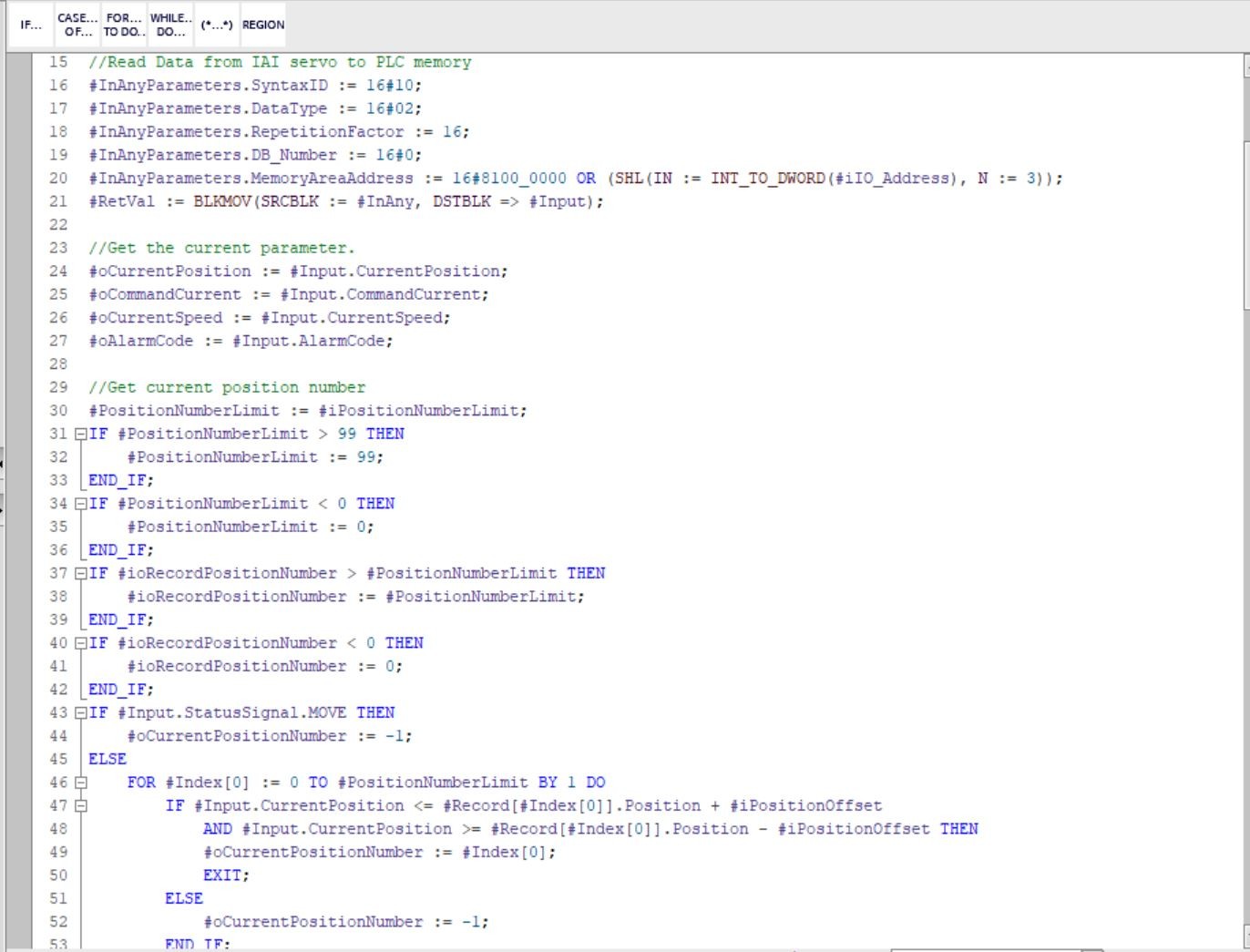
C++实现
由于实际应用中需要实时性,MATLAB的效率可能不够,因此我们用C++重新实现了速度规划算法。下面是一个关键的代码片段:
#include <vector>
#include <Eigen/Dense>
using namespace Eigen;
void computeSpeedProfile(const std::vector<double>& path, std::vector<double>& speed) {
int n = path.size();
MatrixXd A(n, n);
VectorXd b(n);
// 构建QP问题
for (int i = 0; i < n; ++i) {
A(i, i) = 2.0; // jerk的权重
if (i > 0) A(i, i-1) = -1.0;
if (i < n-1) A(i, i+1) = -1.0;
}
// 边界条件
b(0) = 0.0; // 初始jerk为0
b(n-1) = 0.0; // 终止jerk为0
// 求解QP
LLT<MatrixXd> lltOfA(A);
VectorXd x = lltOfA.solve(b);
// 速度积分
double v = 0.0;
for (int i = 0; i < n; ++i) {
v += x(i); // 累积jerk得到加速度
speed[i] = v;
}
}这段代码使用了Eigen库来求解线性方程组。虽然QP的求解在这里被简化为一个线性问题,但在实际应用中,可能需要更复杂的约束条件。
3. QT可视化:从代码到界面
为了更直观地展示路径规划和速度规划的结果,我们用QT做了一个简单的可视化界面。下面是一个界面的截图:
QT界面的主要功能
- 路径显示:用折线图显示规划的路径。
- 速度显示:用柱状图显示每个点的速度。
- 参数设置:允许用户调整QP的权重和约束条件。
QT代码示例
下面是一个简单的QT界面代码片段:
#include <QApplication>
#include <QWidget>
#include <QVBoxLayout>
#include <QPlotWidget>
int main(int argc, char *argv[]) {
QApplication app(argc, argv);
QWidget window;
QVBoxLayout *layout = new QVBoxLayout(&window);
// 创建绘图组件
QPlotWidget *pathPlot = new QPlotWidget;
QPlotWidget *speedPlot = new QPlotWidget;
// 添加到布局
layout->addWidget(pathPlot);
layout->addWidget(speedPlot);
// 更新数据
auto updatePlot = [pathPlot, speedPlot]() {
// 更新路径和速度数据
// ...
};
// 显示窗口
window.show();
return app.exec();
}4. 总结与展望
通过这次实践,我对基于QP的路径规划和速度规划有了更深入的理解。从MATLAB的快速验证到C++的高效实现,再到QT的可视化展示,整个过程让我体会到了理论与实践的结合。
未来,我计划在以下几个方面进行改进:
- 优化QP求解器:目前的C++实现虽然能满足基本需求,但在大规模数据下的效率还有提升空间。
- 增加更多约束条件:比如考虑车辆的动力学特性,或者更复杂的避障条件。
- 改进可视化界面:增加更多的交互功能,比如动态调整参数并实时更新结果。
总之,这是一次非常有意义的实践,也让我对自动驾驶和机器人导航有了更深的兴趣。希望未来能在这个领域继续深入探索!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

{kind=link}
所有评论(0)