人形机器人关节执行器-反转式行星滚柱丝杠
特斯拉Optimus机器人关节采用反转式行星滚柱丝杠(RPLS)实现高功率密度与精准力控。相比传统方案,RPLS通过螺母旋转、丝杠直线运动的设计,在同等体积下提供2-4倍推力,具备>90%传动效率和优异回驱性,特别适合承受腿部关节的频繁冲击。其线接触结构提升寿命,规则构型更利于规模化生产,完美契合特斯拉对力控性能与量产需求的平衡,成为人形机器人关节驱动的理想选择。
一、整体背景:特斯拉机器人关节执行器
特斯拉 Optimus 的关节执行器目标是:
-
高功率密度
-
高精度力控
-
高效率
-
小体积、低质量
-
适合大规模量产
其典型结构为:
无框力矩电机 + 减速 / 直线转换机构 + 力/位置传感 + 控制器
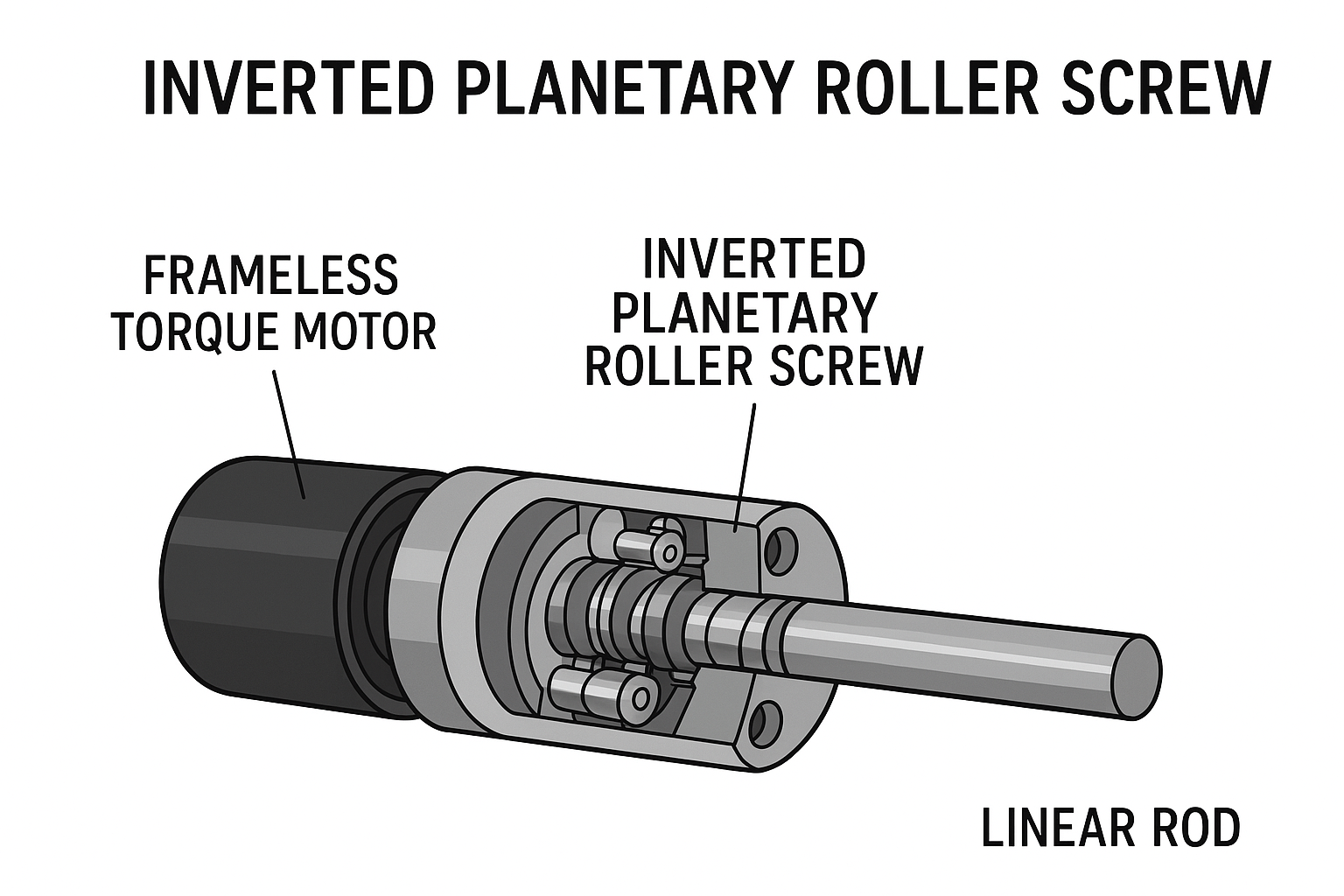
在多数关键关节(膝、踝、肘、肩等),特斯拉大量采用“旋转 → 直线 → 旋转”的力学转换方案,其中核心部件就是:
✅ 反转式行星滚柱丝杠
二、什么是反转式行星滚柱丝杠?
1️⃣ 行星滚柱丝杠(Planetary Roller Screw, PRS)
它是比滚珠丝杠更高级的直线传动机构:
| 对比项 | 滚珠丝杠 | 行星滚柱丝杠 |
|---|---|---|
| 承载能力 | 中 | 极高 |
| 刚性 | 中 | 高 |
| 寿命 | 中 | 长 |
| 冲击耐受 | 一般 | 优秀 |
| 体积功率密度 | 一般 | 极高 |
滚柱不是“点接触”,而是线接触,所以:
单位体积可承载的力大得多
2️⃣ 什么叫“反转式”(Inverted Type)?
常规结构是:
-
丝杠旋转
-
螺母直线运动
反转式行星滚柱丝杠则是:
🔁 螺母旋转,丝杠(推杆)做直线运动
也就是:
-
电机 → 驱动螺母旋转
-
内部丝杠输出直线推力
这种结构特别适合:
-
紧凑关节
-
推杆式关节驱动
-
电机与输出同轴布局
三、为什么特斯拉选反转式行星滚柱丝杠?
这是关键。
✅ 1. 极高的力密度(Power Density)
人形机器人关节要求:
-
小体积
-
大输出力矩 / 推力
反转式 PRS 能做到:
同体积下,推力 ≈ 滚珠丝杠的 2~4 倍
非常适合:
-
膝关节
-
踝关节
-
髋关节
-
肘关节
✅ 2. 极佳的力控与回驱性能
Optimus 强调:
-
力控
-
顺应性
-
安全人机交互
行星滚柱丝杠具备:
-
高效率(>90%)
-
可回驱(不像谐波减速器“发涩”)
-
线性输出力便于 精确力估计
这对 力矩控制 + 末端执行安全 非常关键。
✅ 3. 抗冲击、抗疲劳,适合“走路”
人形机器人关节面临:
-
频繁冲击
-
高循环次数(每天几十万步)
行星滚柱丝杠的优势:
-
多滚柱分载
-
应力分布均匀
-
寿命远超滚珠丝杠
👉 非常适合 腿部关节
✅ 4. 非常适合规模化制造(特斯拉风格)
相比:
-
RV 减速器
-
谐波减速器
反转式 PRS:
-
结构规则
-
可 CNC + 磨削 + 自动装配
-
更适合 汽车级供应链放量
这和特斯拉的制造哲学高度一致。
四、在 Optimus 里的典型应用形式
根据公开视频、拆解分析,特斯拉可能采用:
无框力矩电机
↓
反转式行星滚柱丝杠
↓
直线推杆
↓
四连杆 / 曲柄
↓
关节转动
优势:
-
电机转速高 → 丝杠降速增力
-
推杆输出 → 易于力传感
-
结构紧凑 → 关节“瘦”
五、与其他方案的对比(关键)
| 方案 | 优点 | 缺点 |
|---|---|---|
| 谐波减速器 | 体积小 | 效率低、不可回驱、寿命 |
| RV 减速器 | 精度高 | 重、贵、复杂 |
| 滚珠丝杠 | 成本低 | 承载不足 |
| 反转式行星滚柱丝杠 | 力密度、效率、寿命全面最优 | 制造难度高 |
👉 这就是特斯拉选择它的核心原因
六、总结
特斯拉机器人关节执行器采用反转式行星滚柱丝杠,是为了在“人形机器人”这个极端约束条件下,实现:
🔋 最大力密度
🎯 精准力控
🦵 强回驱与顺应
🏭 面向量产的结构设计

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 23
23 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)