机器人运动学笔记
SDH和MDH会不一样,主要的区别在于SDH中坐标系在连杆末端,MDH中坐标系在连杆首端。虽然这里只是给出z轴,但是由于后面原点位置不同,所以二者z轴也不同。
·
一、建模
参考资料:https://zhuanlan.zhihu.com/p/137960186
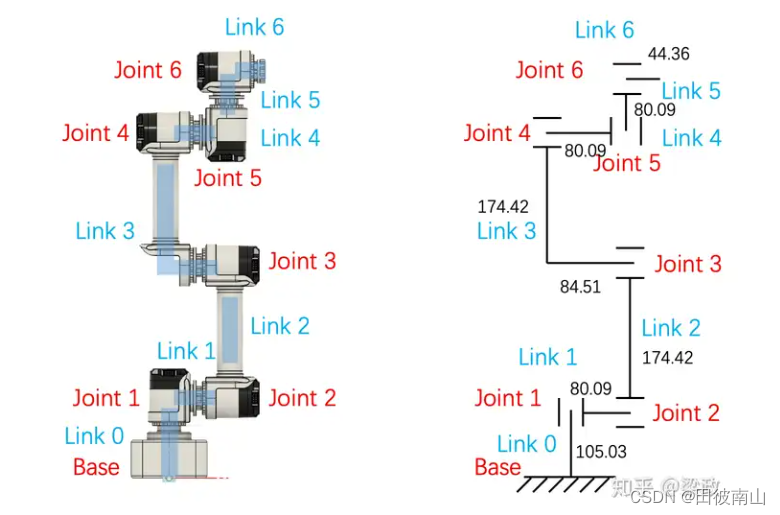
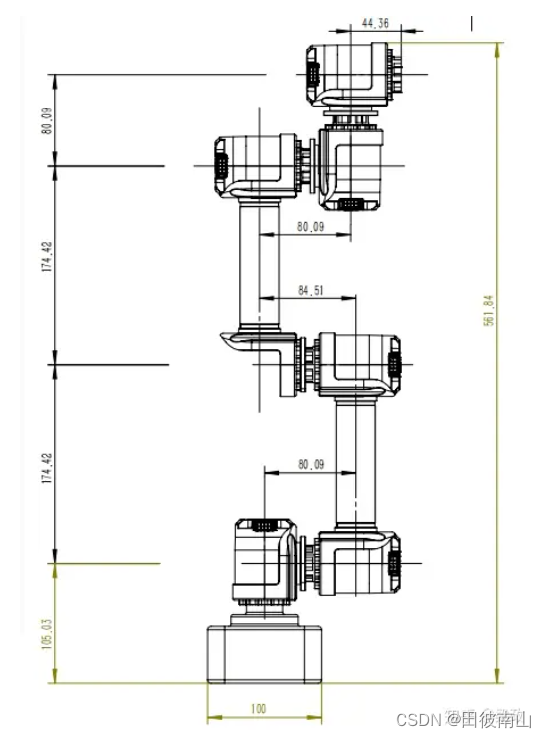
1、三维模型和连杆、关节定义
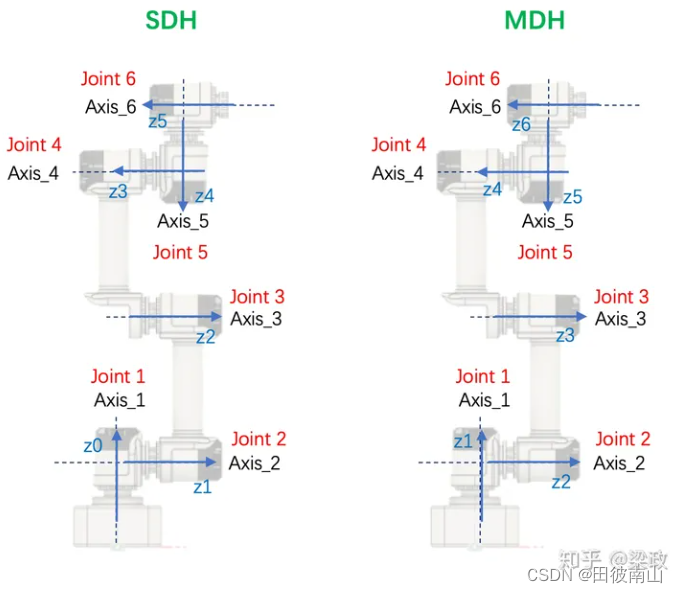
2、设置z轴
- SDH和MDH会不一样,主要的区别在于SDH中坐标系在连杆末端,MDH中坐标系在连杆首端。虽然这里只是给出z轴,但是由于后面原点位置不同,所以二者z轴也不同。
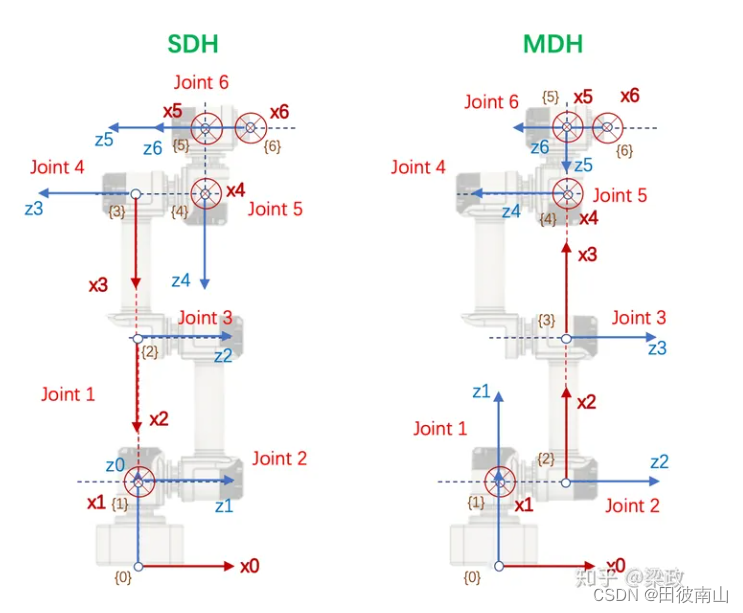
2、设置原点和x轴
| 方法 | SDH | MDH |
|---|---|---|
| 原点 | i和i-1的交线是i原点,如果不想交用公垂线与i交点 | i和i+1的交线是i原点,如果不想交用公垂线与i交点 |
| x轴 | 指向i-1 | 指向i+1原点 |
| 添加 | 0坐标系 | 6坐标系 |
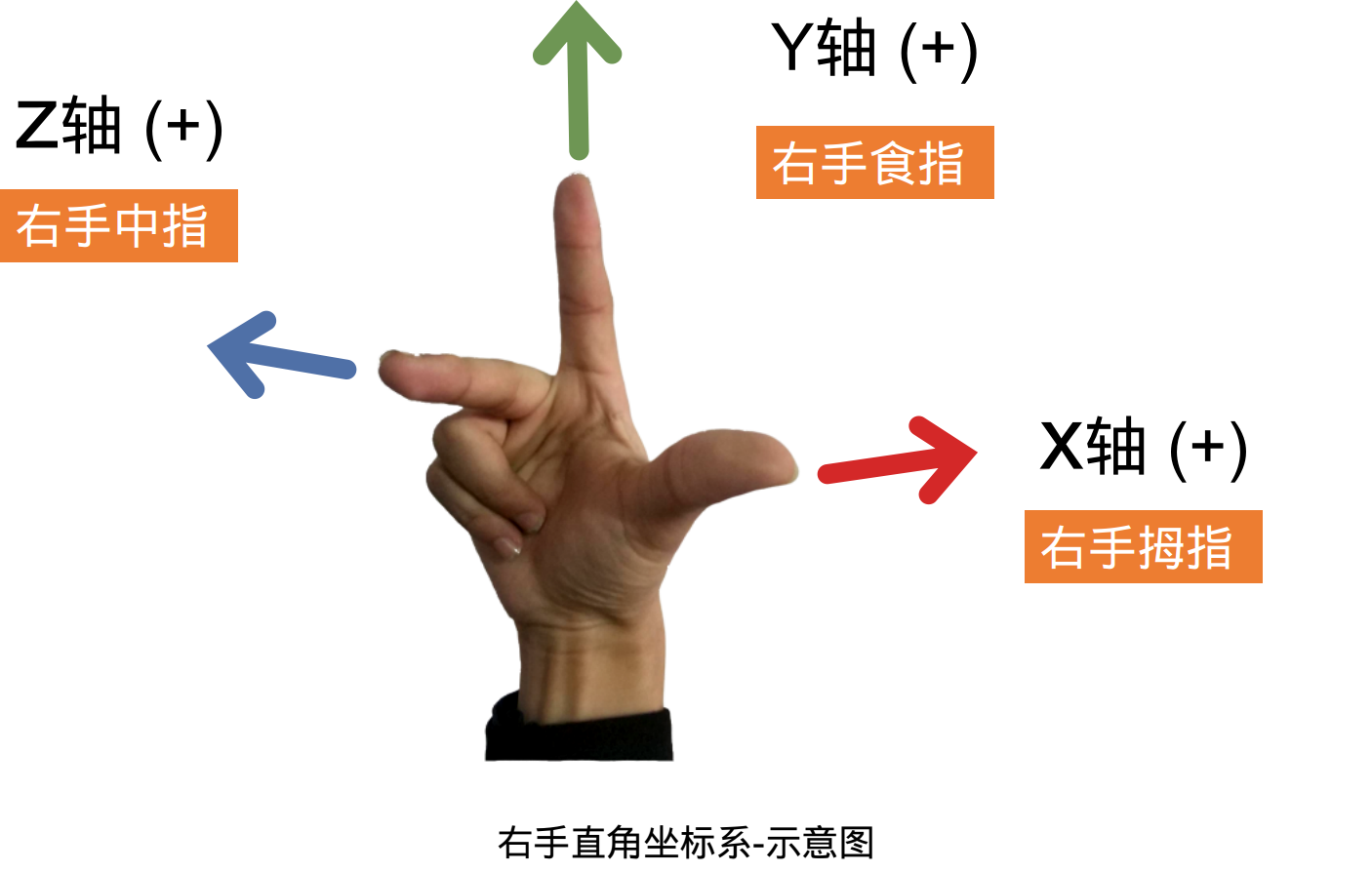
| y轴 | 右手定则 | 右手定则 |
- 关于原点这块我的理解和资料上不同,不知道谁写错了
3、确定dh参数
- SDH和MDH都是由前一坐标系移动到下一坐标系,写i行就是{i-1}到{i}
- 所有角度符合右手螺旋定则的是正方向
- theta是绕z轴转使得x轴重合的角度,d是沿着z轴运动使得x轴重合的距离
(1)SDH
-
θ → d → α → a \theta\rightarrow d\rightarrow\alpha\rightarrow a </span><span class="katex-html"><span class="base"><span class="strut" style="height: 0.6944em;"></span><span class="mord mathnormal" style="margin-right: 0.0278em;">θ</span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">→</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 0.6944em;"></span><span class="mord mathnormal">d</span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">→</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 0.4306em;"></span><span class="mord mathnormal" style="margin-right: 0.0037em;">α</span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">→</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 0.4306em;"></span><span class="mord mathnormal">a</span></span></span></span></span><br> <img src="https://img-blog.csdnimg.cn/direct/73d86d7ac31e48e1972f07864320a5a7.png" alt="在这里插入图片描述"></li></ul>
(2)MDH
-
α → a → θ → d \alpha\rightarrow a\rightarrow\theta\rightarrow d </span><span class="katex-html"><span class="base"><span class="strut" style="height: 0.4306em;"></span><span class="mord mathnormal" style="margin-right: 0.0037em;">α</span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">→</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 0.4306em;"></span><span class="mord mathnormal">a</span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">→</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 0.6944em;"></span><span class="mord mathnormal" style="margin-right: 0.0278em;">θ</span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">→</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 0.6944em;"></span><span class="mord mathnormal">d</span></span></span></span></span><br> <img src="https://img-blog.csdnimg.cn/direct/4f88550a2ffa4fb2b98e10b8aefb6cbd.png" alt="在这里插入图片描述"></li></ul>
(3)几何参数
二、正运动学
- 资料:https://blog.csdn.net/subtitle_/article/details/130982929
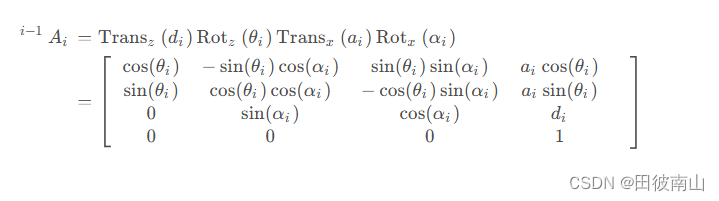
1、齐次变换矩阵
-
可以以此计算所有的T,左上的3×3是三个轴,右侧是三维向量是原点坐标
-
标准DH的齐次变换矩阵
-
改进dh法的齐次变换矩阵

三、逆运动学
- 资料: https://blog.csdn.net/wh_STUDY/article/details/126862627
- 常用的方法有几何解法、代数解法和数值解法
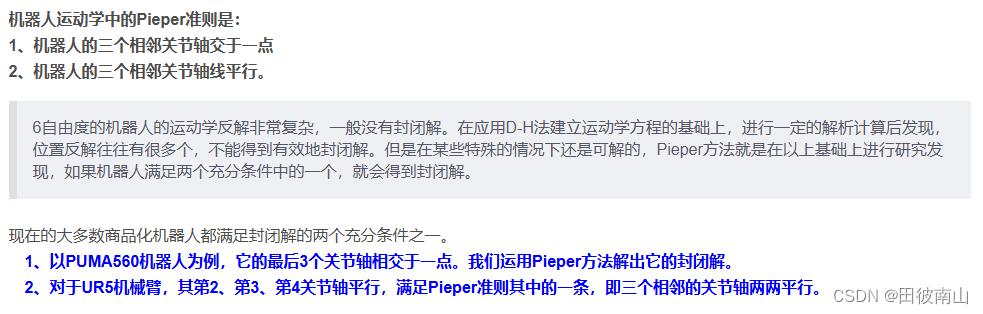
1、pieper准则
- 如果一个机械臂的结构满足pieper准则,则有封闭解,即可以获得用公式表达的解
2、几何解
- 几何解直接看参考连接中举得案例,一般很少使用
3、代数解
- 参考资料:工业用六轴机械臂的建模与仿真_卢锐
3.1 改进dh建模
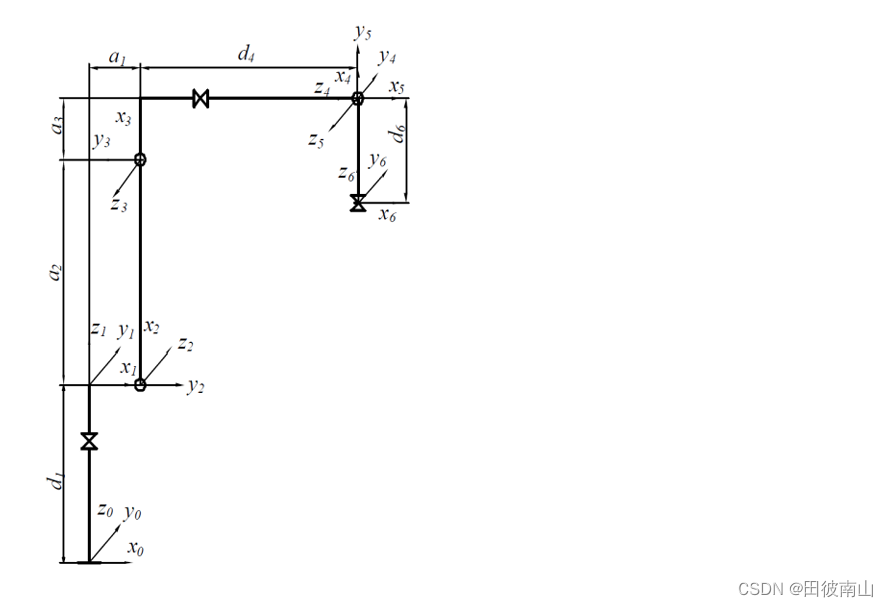
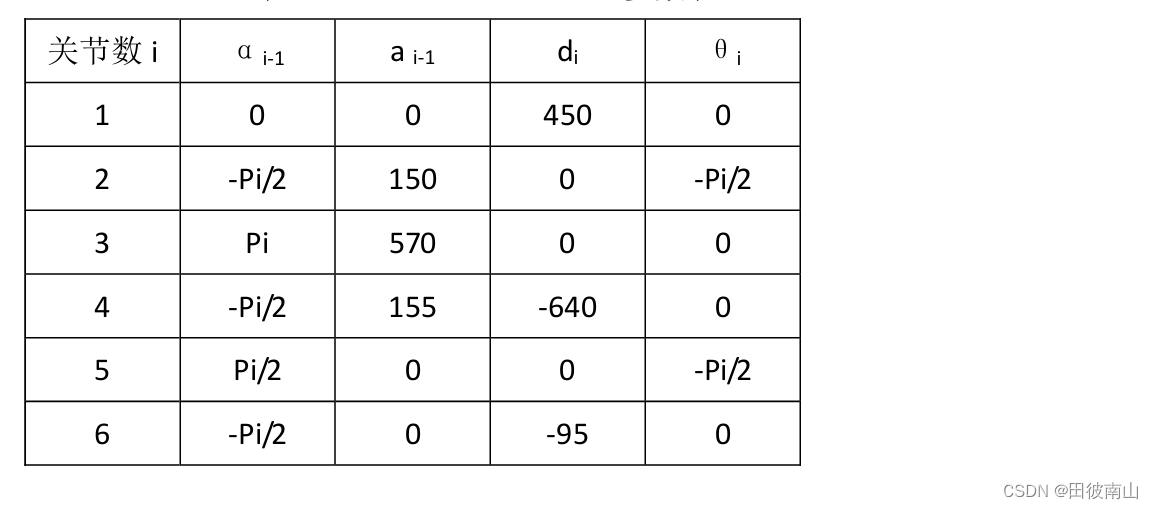
3.2 求代数逆解
- 利用的就是齐次变换矩阵的相乘(一般是在左侧的上下标)
A 6 0 = A 1 0 A 2 1 A 3 2 A 4 3 A 5 4 A 6 5 A^0_6 = A^0_1A^1_2A^2_3A^3_4A^4_5A^5_6 </span><span class="katex-html"><span class="base"><span class="strut" style="height: 1.1111em; vertical-align: -0.247em;"></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">6</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">0</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">=</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 1.1111em; vertical-align: -0.247em;"></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">1</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">0</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">2</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">1</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">3</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">2</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">4</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">3</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">5</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">4</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">6</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">5</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span></span></span></span></span></span></li><li>求<span class="katex--inline"><span class="katex"><span class="katex-mathml"> θ 1 \theta_1 </span><span class="katex-html"><span class="base"><span class="strut" style="height: 0.8444em; vertical-align: -0.15em;"></span><span class="mord"><span class="mord mathnormal" style="margin-right: 0.0278em;">θ</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.3011em;"><span class="" style="top: -2.55em; margin-left: -0.0278em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">1</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.15em;"><span class=""></span></span></span></span></span></span></span></span></span></span><br> <span class="katex--display"><span class="katex-display"><span class="katex"><span class="katex-mathml"> A 1 0 − 1 A 6 0 = A 2 1 A 3 2 A 4 3 A 5 4 A 6 5 {A^0_1}^{-1}A^0_6 = A^1_2A^2_3A^3_4A^4_5A^5_6 </span><span class="katex-html"><span class="base"><span class="strut" style="height: 1.3151em; vertical-align: -0.247em;"></span><span class="mord"><span class="mord"><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">1</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">0</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span></span><span class="msupsub"><span class="vlist-t"><span class="vlist-r"><span class="vlist" style="height: 1.0681em;"><span class="" style="top: -3.317em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight"><span class="mord mtight">−</span><span class="mord mtight">1</span></span></span></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">6</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">0</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mspace" style="margin-right: 0.2778em;"></span><span class="mrel">=</span><span class="mspace" style="margin-right: 0.2778em;"></span></span><span class="base"><span class="strut" style="height: 1.1111em; vertical-align: -0.247em;"></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">2</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">1</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">3</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">2</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">4</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">3</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">5</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">4</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span><span class="mord"><span class="mord mathnormal">A</span><span class="msupsub"><span class="vlist-t vlist-t2"><span class="vlist-r"><span class="vlist" style="height: 0.8641em;"><span class="" style="top: -2.453em; margin-left: 0em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">6</span></span></span><span class="" style="top: -3.113em; margin-right: 0.05em;"><span class="pstrut" style="height: 2.7em;"></span><span class="sizing reset-size6 size3 mtight"><span class="mord mtight">5</span></span></span></span><span class="vlist-s"></span></span><span class="vlist-r"><span class="vlist" style="height: 0.247em;"><span class=""></span></span></span></span></span></span></span></span></span></span></span><br> 令两侧的(1,4)和(2,4)分别相等,依次求解其他角度,最终会有8组解</li></ul> </div>

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)