具身机械主义的解释框架 —— 一种关于具身智能的规范性说明
具身机械主义:一种闭环机制导向的、以具身智能的可治理性为目的的机械论
摘要
具身机械主义(Embodied Mechanismism)是一种面向复杂智能系统(机器人、自动驾驶、工业智能体、人机协作系统等)的解释框架。它将“具身智能现象”理解为脑/算法—身体—环境—制度共同构成的多时间尺度闭环机制的稳定产物,并要求解释必须能落地为可观测量、失效断点与可治理干预。该框架继承新机械主义的“实体—活动—组织”机制观,同时引入工程实践中的四个第一性约束:可观测性、实时性、物理边界、安全与规范,以解决传统解释在可验证性、可运营性与变更可追责方面的不足。
1. 背景与问题:为什么需要“具身机械主义”
1.1 解释困境:
在智能系统讨论中,常见解释模式存在两类断裂:
-
理论断裂:大量概念停留在隐喻层(理解、意向性、表征、对齐),难以提供可证伪的结构性说明。
-
工程断裂:即便模块可工作,系统仍可能在现场扰动下出现拥堵、死锁、近失事件、效率坍塌,且难以复现与追责。
具身机械主义认为:解释之所以无力,往往不是“概念不够高级”,而是解释单位选错——用“模块功能”解释“闭环稳定性”、用“内部状态”解释“环境耦合效应”、用“结果指标”替代“机制断点”。
1.2 工程现实:具身系统迫使解释升级
具身智能系统面对的不是静态输入输出,而是:
-
环境连续扰动、动态障碍与不确定性;
-
传感器误差、延迟、计算与通信约束;
-
物理边界(摩擦、载荷、能量、制动距离);
-
人类交互与制度规范(让行、禁行、责任归属)。
因此,解释必须从“是什么”转向“为什么在扰动下仍能稳定运行,以及何时会失稳”(解释能够指导工程化落地)。
2. 概念界定:具身机械主义是什么
2.1 定义
具身机械主义是一套解释原则:
一个具身智能现象(稳定行为与性能)应当被解释为:在明确边界条件下,由多实体与多活动以特定组织方式构成的闭环机制所产生的稳定结构;解释必须给出该闭环机制的断点图谱、可观测量体系与治理性干预。
2.2 与新机械主义的关系
新机械主义强调:现象由“实体与活动的组织”产生。
具身机械主义在此基础上加入三条“工程强化”:
-
闭环性:解释单位从“产生现象”升级为“维持现象(稳定性)”。
-
约束性:环境结构、物理边界、实时性、规范成为机制的一部分。
-
治理性:解释必须映射到监控—诊断—干预—回归验证闭环。
可以把它理解为:新机械主义 + 控制论/系统工程 + 运维治理语言。
3. 核心公理:四条解释承诺
公理 1:现象是闭环机制的稳定产物
智能不是内部算法“算出来”的属性,而是闭环在扰动下仍能维持的组织化行为模式。
公理 2:机制边界是可变的,由任务与约束共同确定
边界不以“系统内部”为天然界限,而以可观测性、可控性、可验证性、可治理性划定;环境结构与制度往往是机制要素。
公理 3:多时间尺度是第一等公民
具身系统至少同时存在:安全反射(毫秒)—导航交互(秒)—资源协同(分钟)—学习改造(周)。忽略时标耦合将导致解释不完整。
公理 4:解释必须可落地为观测与干预
不能落地为监控指标、失效断点与可验证干预的解释,不满足具身机械主义的工程解释标准。
4. 解释对象:何谓“现象”
具身机械主义首先要求把“现象”定义为可检验的稳定外在表现,典型包括:
-
安全现象:碰撞为零只是底线,更关键是 near-miss 分布可控、紧急制动可审计、行为可预测。
-
效率现象:吞吐、准时率、拥堵概率、死锁频率、平均任务时长。
-
质量现象:对接精度、动作成功率、货损率、异常恢复时间。
现象定义是后续机制建模与治理闭环的锚点。
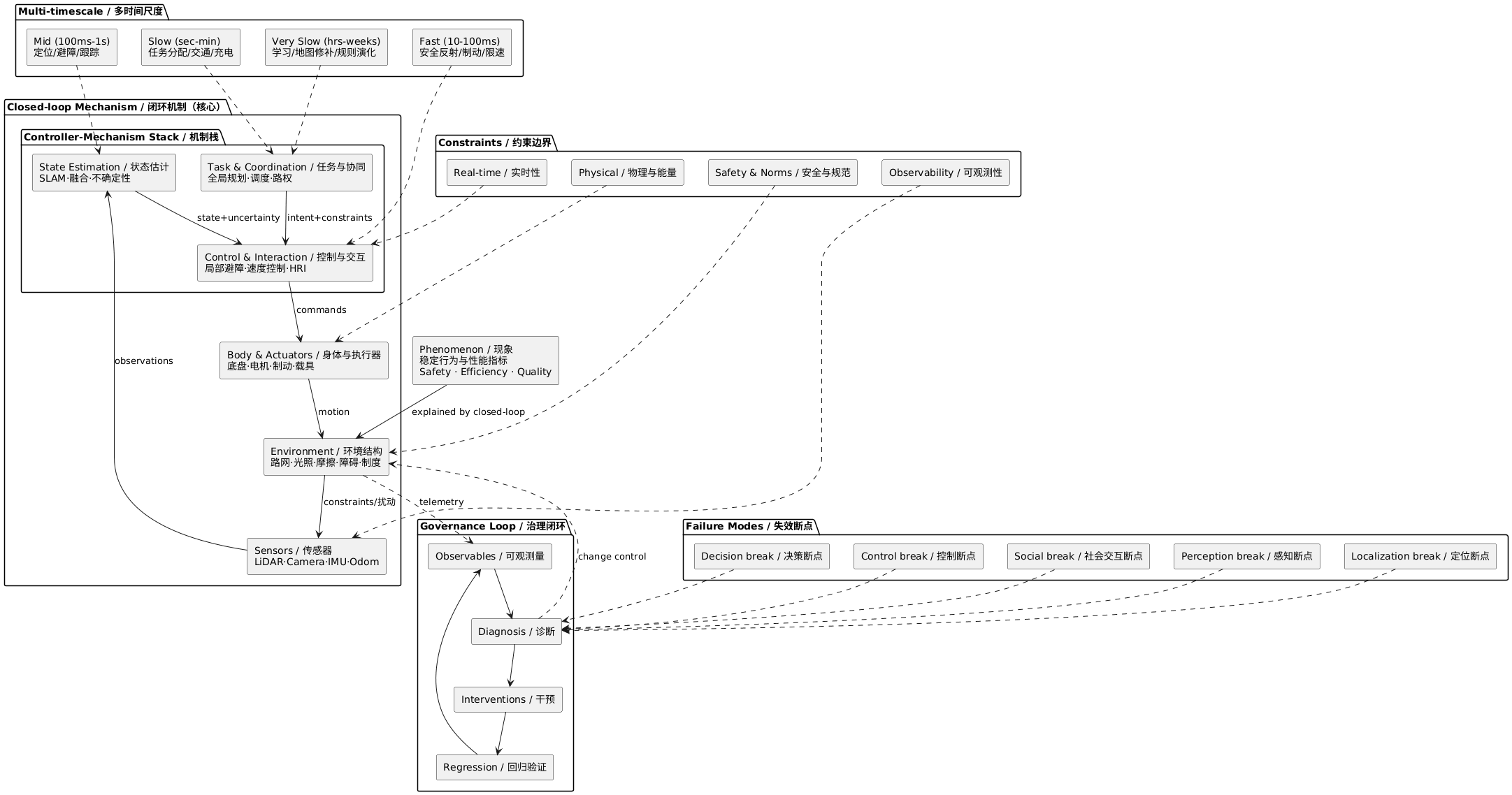
5. 解释框架:E-A-O × Closed Loop × Constraints × Governance
具身机械主义提出一个可复用的解释结构(可作为任何系统的“解释模板”):
5.1 机制三要素:实体—活动—组织(E-A-O)
-
实体(Entities):执行器、传感器、计算单元、环境结构、制度与人。
-
活动(Activities):感知、估计、规划、控制、交互、协同、学习与改造。
-
组织(Organization):这些实体与活动如何耦合成闭环、分层、冗余与降级结构。
5.2 闭环核心:认知作为“循环因果”
闭环描述的是循环因果:
感知 → 状态估计(含不确定性)→ 决策/控制 → 身体行动 → 环境变化 → 再感知。
具身机械主义强调:解释的关键不是“每一块做什么”,而是闭环如何保持稳定。
5.3 约束边界:四类第一性约束
-
可观测性:遮挡、反光、特征稀疏、动态障碍密度;决定“能否知道”。
-
实时性:感知延迟、控制周期、网络抖动;决定“能否及时做”。
-
物理与能量:载荷、摩擦、坡度、制动距离、电量;决定“能否做到”。
-
安全与规范:功能安全链路、让行规则、禁行区、责任边界;决定“允许怎么做”。
约束不是背景,而是机制的一部分;边界被约束塑形。
5.4 治理闭环:解释的可运营性
解释必须连接治理闭环:
监控(Observables)→ 诊断(Diagnosis)→ 干预(Interventions)→ 回归验证(Regression)。
没有回归验证的干预会造成系统不可治理;没有版本关联的诊断无法追责。
6. 失效断点图谱:从模块故障到闭环断裂
具身机械主义用“闭环断点”组织风险:
-
感知断点:误检/漏检 → 行为抖动、频繁刹停、擦碰风险。
-
定位断点:漂移/跳变 → 越线、进站失败、路径偏离。
-
决策断点:路权缺失/策略冲突 → 死锁、系统性拥堵。
-
控制断点:模型失配/轮滑 → 制动超界、对接误差放大。
-
社会交互断点:人车预期不一致 → near-miss 上升、效率坍塌。
-
协同断点:通信抖动/调度异常 → 局部最优导致全局失稳。
断点图谱的价值在于:它把“解释”直接连接到“诊断与干预”。
7. 可观测量体系:解释的证据结构
具身机械主义要求建立三类证据:
7.1 车端证据(实时安全)
定位不确定性、急停率、控制延迟、传感器健康、对接误差等。
7.2 系统证据(秩序与效率)
准时率、平均任务时长、拥堵热力、死锁频率、路口等待分布等。
7.3 治理证据(变更可追责)
地图/规则/软件版本与事件对齐;场景库覆盖率、回放与仿真通过率;near-miss 统计的空间与时间趋势。
证据结构使解释具备可证伪性与可回归性。
8. 解释如何产生工程收益:三种“可治理智能”
具身机械主义的解释框架带来三类工程可控收益:
-
可诊断智能:问题不再是“玄学偶发”,而是可被定位为某类断点。
-
可降级智能:在约束被破坏时不崩溃,而是进入可解释的降级模式(限速、绕行、避让策略切换、人工接管)。
-
可演化智能:改进通过治理闭环进入回归验证,避免“修 bug 引入新 bug”。
9. 方法论输出:一套可复用的解释模板
对任何具身系统,可按如下模板生成解释文档:
-
现象定义(安全/效率/质量)
-
机制边界(系统+环境结构+制度)
-
E-A-O 机制描述(实体/活动/组织)
-
多时间尺度闭环(快/中/慢/超慢)
-
约束边界(可观测/实时/物理/规范)
-
失效断点图谱(闭环断裂分类)
-
可观测量与证据结构(车端/系统/治理)
-
干预与降级策略(与断点一一对应)
-
回归验证与版本治理(场景库、仿真/回放、准入门槛)
-
解释承诺(可预测、可诊断、可追责)
10. 结语:具身机械主义的解释标准
具身机械主义不追求“更形而上”的智能定义,而确立一个工程解释标准:
一个解释只有在以下条件同时满足时才算完成:
(a) 给出闭环机制(E-A-O + 组织结构);
(b) 明确约束边界(可观测/实时/物理/规范);
(c) 提供断点图谱(失稳在哪里发生);
(d) 提供可观测量体系(如何被证据支持);
(e) 连接治理闭环(如何干预并可回归验证)。
这使它既是一种机制论,也是一种“可治理的工程理性”。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)