【玩转机械臂】(二)机器人DH参数模型与正运动学
目录
笔者注:这是【玩转机械臂】专栏的第(二)篇文章,内容主体来源于笔者近期的学习与思考。作为持续学习的过程,笔者亦是抱着“边学边写”的态度,以做笔记的方式记录下专业领域的相关知识,愿能为更多处于学习或研究初期志同道合的朋友提供参考,文中如有疏漏之处,恳请广大前辈和读者批评指正。文末将附上有前后衔接关系的相应文章链接,欢迎跳转查看。
1 DH参数模型(Denavit-Hartenberg)
1.1 四个DH参数的定义
记基座为坐标系{0},此后的每个可动关节依次记为关节1,2,...,i,...;第i个关节与下一个关节之间的连接部分称为连杆i。考虑关节i与i-1(“关节0”即为基座),首先标出各自的转轴(或平动轴),如果是基座则取一较方便的、符合实际几何关系的方向(一般为基座坐标系的z轴)为“轴”。
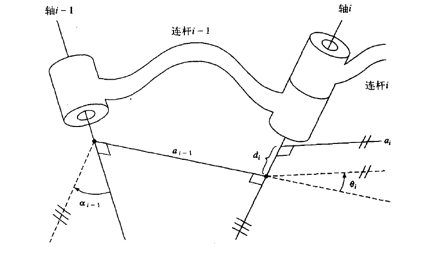
这两轴的关系一共有三种:异面、相交和平行,由此定义以下两个参数:
连杆长度:轴i-1与轴i的距离。两轴平行时距离容易理解;两轴相交时距离为0;两轴异面时,应先作出公垂线,取公垂线与二者的交点所构成线段的长度为两轴距离。连杆长度是绝对值,只有非负值,不区分方向。
连杆长度描述了相邻两关节间的相对距离关系。
连杆扭角:轴i-1与轴i的夹角。两轴相交时,夹角容易理解;两轴平行时,夹角为0;两轴异面时,应现将其中一者沿公法线平移至另一轴所在平面后再取相交的夹角。确定扭角方向时,应遵循“右手定则”:右手拇指沿
所在直线从i-1指向i,四指弯曲方向即为扭角正方向。
关节扭角描述了相邻两关节的相对朝向关系。
需要注意的是,对于末端关节n而言,由于已经没有关节n+1,末端关节的杆长与扭角
无实际意义,通常不定义或定义为0,简记为“向后定义,有始无终”。
在作出各个连杆长度后,考虑相邻的两杆长、
各自所在的直线(即两轴的公垂线),则依旧有异面、相交和平行三种可能的位置关系,由此继续定义两个参数:
关节距离:直线
与
的距离,具体定义与连杆长度中两轴距离的定义一致,同样也是绝对值,只有非负值,不区分方向。
关节距离描述了相邻两连杆的相对距离关系。如果关节i是移动关节,则即为可变的关节变量。
关节转角:直线
与
的夹角,方向同样符合“右手定则”,注意拇指应沿
从i-1指向i。
关节转角描述了相邻两连杆的相对朝向关系。如果关节i是转动关节,则即为可变的关节变量。
需要注意的是,对于关节0(基座)而言,由于没有更靠前的关节,因而与
无实际意义,通常不定义或定义为0,简记为“向前定义,有终无始”。
以上四个参数称为DH参数。一旦机器人的机械结构确定,那么每个关节的4个DH参数也随之确定,一般而言不会在机器人运动的过程中改变。可以说,用DH参数就可以抽象出机器人的根本结构,并且最“简明扼要”地描绘出机构的“骨架”、“轮廓”。4个参数的定义及特点汇总如下:
| 参数名称 | 参数符号 | 参与定义的部件 | 具体定义 | 无定义的部位 | 意义 |
|---|---|---|---|---|---|
| 连杆长度 |
关节i与关节i+1 (向后定义) |
轴距离 |
末端关节 (有始无终) |
结构参数 | |
| 连杆扭角 | 轴夹角 | ||||
| 关节距离 |
关节i与关节i-1 (向前定义) |
杆距离 |
基座(关节0) (有终无始) |
移动关节变量 | |
| 关节转角 | 杆夹角 | 转动关节变量 |
1.2 机器人坐标系的建立方法
确定DH参数后,还应当为各个关节建立起相应的坐标系,以便利用基本的坐标变换知识实现不同关节间物理量的变换。常用的基本坐标变换请参见:
- 在各个关节上标出转轴或移动轴,并作为坐标系的z轴。z轴的方向可任意选取,但一般应尽量保持一致。
- 依据标出的轴线分别计算
与
、
与
。注意,如果存在平行的两轴,则此时
- 对于不平行的两轴i-1与i,取公垂线
与轴i-1的交点作为系{i-1}的原点;
- 对于平行的两轴i-1与i,则公垂线可任意选取(对应第2步中
的公垂线,之后再取与轴i-1的交点为原点。
- 以公垂线
- 根据已确定好的x轴和z轴,确定y轴。
- 注意:基座{0}没有转轴或移动轴,因此其z轴不能根据轴位置来确定,应当根据实际几何位置的需求确定;末端{n}没有后续的关节(即没有有效的
- 在选取DH参数坐标系时如果存在“争议”,事实上大可放心选取,因为不同的建系方式其实并不会影响计算的正确性,只要在每一种建系方式下DH参数的定义都自洽即可。
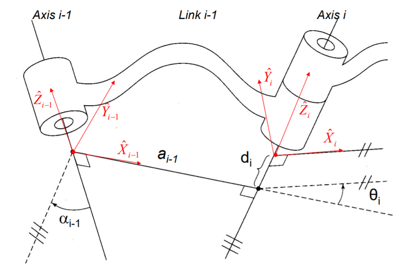
可以看到,在这样一套与DH参数相匹配的坐标系中,连杆长度总是沿着坐标系{i}的x轴,连杆扭角
总是绕坐标系{i}的x轴按右手定则旋转而成。关节距离
总是沿着坐标系{i}的z轴,关节转角
总是绕坐标系{i}的z轴按右手定则旋转而成。在有了上述的统一规范之后,用坐标变换来描述各机构的位置关系就变得容易了。
1.3 DH参数表及相应坐标变换
假设机器人机构拥有n个关节,则每个关节(第i个)都拥有4个DH参数,因而一共定义有4*n个参数(关节0上应+2个参数,但关节n上又-2个参数)。将各个参数列在一张(n+1)行、4列的表中,称为DH参数表:
| 0 | none (or 0) | none (or 0) | ||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| ... | ... | ... | ... | ... |
| n | none (or 0) | none (or 0) |
这张DH参数表就包含了一座机器人最核心的结构信息。当然还有另一种形式的DH参数表,只有n行,如表3所示,这种形式的DH参数表适合用于构建关节间的坐标变换矩阵。
| 1 | ||||
|---|---|---|---|---|
| 2 | ||||
| 3 | ||||
| ... | ... | ... | ... | ... |
| n |
根据DH参数以及先前建立起的坐标系规则,根据坐标的相对变换关系(矩阵右乘)可推知从{i}到{i-1}的坐标齐次变换矩阵为:
. (1)
由此,若需要将机器人末端坐标变换到基座,则总的变换矩阵为:
. (2)
2 机器人正向运动学
机器人运动过程中的物理量可分为两类:关节变量与广义/操作变量,由变量又分别构成了关节空间和操作空间。
关节变量:可驱动关节上能够随控制指令而改变的变量,包括转动关节的关节角度和移动关节的移动距离。当机构中有n个可动关节时,关节变量就有n个。
广义/操作变量:一般指机械臂末端或被研究的某点在实际工作需求中的位姿变量,例如空间位置(x,y,z)和姿态角度(θ,φ,ψ)。由于三维空间中运动自由度的限制,广义/操作变量最多只有6个。
机器人运动学,实际上研究的就是关节空间与广义/操作空间之间的映射关系。由关节空间推知操作空间,即为正运动学;反之,由操作空间推知工作空间,即为逆运动学。
此外,比关节空间更底层的还有驱动器空间[3],其作用是描述驱动装置是如何影响关节运动的,例如差速小车各轮速度与转角、位移之间的关系,关节舵机占空比大小与关节转角之间的关系等。不过驱动器空间与关节空间之间的解算关系求解起来相对容易,本文不展开叙述。
2.1 正运动学与雅可比矩阵
机器人正运动学将关节变量映射为操作变量,若记关节变量为,操作变量为
,则正运动学
可表示为:
. (3)
通常有n≥m,因为n<m时总存在某些广义变量的运动是受限的(即缺少相应的自由度),这被称为欠驱动结构。n=m时,任意关节坐标与唯一的广义坐标对应,也就是说每一关节适配一个自由度;n>m时,同一广义坐标可能对应不同的关节坐标,称为关节变量的冗余设计。
一般而言,在有DH参数的情况下,依据(1)(2)两式可以很方便地推出末端位姿矩阵关于关节变量或
的关系,并依据选取的的位置描述方法(如笛卡尔坐标、求坐标等)和姿态描述方法(如欧拉角、RPY等)对位姿矩阵进行变换,就可以获得正运动学关系(3)。
考虑到正运动学关系是向量函数,假设,在确定了正运动学关系式的基础上,引入运动的微分,用以下雅可比矩阵(Jacobian Matrix)表示:
. (3)
该矩阵反映了瞬时的微小关节变量变化将会引起的广义变量的变化,也就是微分运动量:
, (4)
进而可知两个空间之间瞬时速度的关系:
. (5)
反之,也有
, (6)
. (7)
可见,雅可比矩阵是连接关节变量空间与广义变量空间之间的桥梁。
m=n时,若雅可比矩阵奇异,即,则称此时的关节点位
为奇异形位。奇异形位意味着此时雅可比矩阵不可逆,方程(5)不存在唯一解;同时,必然存在某些广义变量能直接被其他广义变量表示(线性相关),即关节存在耦合关系、运动受限,2个(甚至更多)关节变量会退化成一个关节变量。
除此之外,雅可比矩阵奇异时还可以这样理解:奇异形位处,需要关节变量的速度达到无穷大,才能同时使得某个广义变量获得期望的速度,这在现实中显然是不可能的。也就是说,关节变量失去了对某个广义变量独立控制的作用,相应的自由度已经丧失。
m>n时,本就存在(m-n)个广义变量不受控;m<n时,存在冗余的关节变量,即同一广义速度可能对应多个关节速度,这些冗余的解为绕过奇异位形提供了备选方案。这两种情况下,雅可比矩阵的逆是广义逆(或称伪逆),即式(7)所示。
需要注意的是,雅可比矩阵不为常量,而是与当前的关节变量有关。
3 机器人运动的速度
(5)式揭示了机器人运动过程中关节空间与广义空间之间的速度关系。然而,在具体分析机器人各部位的运动情况时,通常还需要获知同一空间中不同坐标系之间的速度关系。以下将针对速度的坐标变换具体展开叙述。
3.1 速度在的坐标系间的变换
3.1.1 速度变换的一般形式
现考虑{A}{B}两系与某一动点,则根据上一篇中坐标齐次变换的知识,可知该点在两系之间的位置坐标关系为
. (8)
若要获得该点的瞬时速度,可在上式两边分别对时间求导,即
. (9)
进一步将导数项展开,可知{A}系中p点的速度由三部分构成:
. (10)
其中第一项和第三项是由坐标系之间的相对运动引起,分别表示{B}系相对于{A}系的旋转运动与平移运动,而与点p自身的运动无关;只有第二项才代表了点p自身的运动属性。
3.1.2 用角速度矢量表示坐标系的旋转运动
在(10)式中,的物理意义实际上并不直观。为此,通常还使用角速度矢量来描述坐标系的旋转运动:
.
角速度矢量的物理意义是:以单位向量的某一平行线为轴,依据“右手定则”的方向,按角速度大小
旋转。
需要注意的是,角速度矢量不仅大小可能时变,方向也可能是时变的,因此角速度矢量对时间的直接积分一般没有实际意义。不过,在机器人系统中,由于转轴矢量
一般是恒定的,变化的只有角速度大小
,因此角速度大小的积分可用于求取刚体的姿态角度,即通用坐标变换
,其中
。
若考虑某点的位矢及其角速度矢量
,当转轴过原点时,该点由于转动而具有的线速度为:
. (11)
如果在当前的坐标系{N}内转轴不过原点,则应先取一个能够使转轴过原点的坐标系{M},在{M}中重新计算得该点的位矢和角速度矢量之后,才能使用式(11)。使用后,还应将转换结果重新变换回原坐标系{N}。
在表示坐标系{B}相对于系{A}的旋转运动时,使用带角标的角速度矢量来表征。利用式(11),可得{B}内任意一点
因坐标系{B}的旋转而在{A}中具有的线速度为
,因此有:
. (12)
(12)式实际上是提供了描述坐标系旋转运动的另一种方式。在实际应用时,可视情况选择左侧的导数描述形式或右侧的角速度矢量描述形式。
3.1.3 角速度矢量在不同坐标系之间的传递
角速度矢量本质上是一个三维矢量,在不同坐标系中的坐标形式遵循一般的坐标变换规则。不过,由于角速度矢量是自由矢量,不同起点的角速度矢量在同一坐标系内是可以相加的。现考虑在坐标系{A}中系{C}的角速度矢量,其中以{B}作为中间坐标系,则满足以下关系:
. (13)
该式可以这样理解:在{B}看来,{C}理所应当地拥有角速度;但是换到{A}的视角,所有{B}系中的坐标都应进行变换,因此有
;与此同时,{B}在{A}还可能拥有自身的角速度
,这个角速度应当进一步叠加到{C}上,因此有(13)式。
3.2 速度在机器人关节间的传递
接下来将以上通用理论运用到具体的机器人机构中:假设现有关节{i-1}与关节{i},以及另一坐标系{0},目的是通过{i-1}将{i}的速度变换至坐标系{0}。
3.2.1 转动关节向前传递
首先讨论{i}是转动关节的情况。
1. 角速度的传递:
以{i-1}为中间坐标系,套用式(13)可得:
,
由于{i-1}与{i}是相邻关节,二者之间的关系较简单,因此有
,
需要说明的是,表示一个与{i}初始位置重合,但不随{i}的转动而发生变化的绝对坐标系,应注意区分
与
(实际上
)。若定义:
,
则最终的变换式应写作:
. (14)
其中,是关节变量的速度。
2. 线速度的传递:
套用式(10)(12)可得:
.
由于{i}是转动关节,坐标系{i}的原点在{i-1}看来只有转动而无平动,即
.
因此通过下式可将{i}系的线速度传递到{i-1}上,进而再传递至坐标系{0}:
, (15)
其中是坐标系{i}的原点在{i-1}中的位置矢量,可由DH参数及(1)式确定:
. (16)
3.2.2 移动关节向前传递
在移动关节中,{i}只有平动而无转动,因此在{i-1}看来,故有:
. (16)
也就是说,{i}在{0}看来的转动速度完全只由作为中间坐标系的前一关节{i-1}决定。
而在考虑线速度时,在转动关节中为零的项重新发挥了作用,其中
并且是关节的控制量,进而可得线速度的传递公式为:
. (17)
3.2.3 小结
综上所述,当关节{i}为转动关节时:
.
当关节{i-1}为移动关节时:
.
其中
.
至此本文内容结束。下篇将继续梳理机器人逆运动学方面的知识,敬请关注!
参考文献
[1] 蔡自兴, 谢斌编著. 机器人学[M]. 清华大学出版社, 2015.
[2] 杨洋,苏鹏,郑昱编著.机器人控制理论基础[M]. 机械工业出版社, 2021.
[3] 樊泽明等编著. 机器人学基础[M]. 机械工业出版社, 2022.
[4] (日)白井良明编著. 机器人工程[M]. 科学出版社, 2001.
-- 友情链接 --
【玩转倒立摆】(二)一阶倒立摆之 - 基于全状态反馈的极点配置方案
-- 内容预告 --
-- 更新中 --
- 【状态空间漫游记】系列
【状态空间漫游记】(一)卡尔曼滤波 (Kalman Filter) 算法的基本原理与代码实现
【状态空间漫游记】(二)模型参考自适应控制(MRAC)之局部参数最优化方法(MIT律) - 【玩转倒立摆】系列
【玩转倒立摆】(三)一阶倒立摆之 - 基于分离原理的状态观测器方案
【玩转倒立摆】(四)一阶倒立摆之 - 最优线性二次调节器(LQR)方案 - 【玩转机械臂】系列
【玩转机械臂】(三)机器人逆运动学及其求解方法
-- 筹备中 --
- 【玩转无人机】系列

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)