登录社区云,与社区用户共同成长
邀请您加入社区
好东西 2025最新易支付模板源码 全开源 前台+用户中心+后台三合一
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
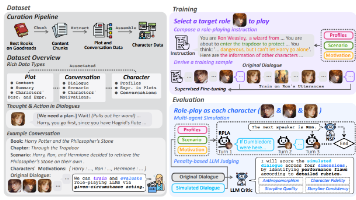
COSER: Coordinating LLM-Based Persona Simulation of Established Roles
抗磁、抗窄、抗微动!Captiks全身惯性动捕系统 攻克车内精细动作捕捉难题
EM-Core-Agent:AI Agent 具身认知核心系统——架构白皮书 V1.0
扫一扫分享内容
为遵守国家网络实名制规定,未绑定将限制内容发布与互动








 已为社区贡献2条内容
已为社区贡献2条内容
已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)