《深度学习之PyTorch物体检测实战》读书笔记(一)浅谈物体检测与PyTorch
·
开头的话
最近在做物体检测,遍寻资料,发现这本书写得蛮不错。条理清楚,不是资料的堆砌,一看作者就是这方面的行家,貌似是北航的学霸。强烈推荐大家购买该书,支持作者。
第一章 浅谈物体检测与PyTorch
非深度学习的基础知识及安装等步骤都没有记录
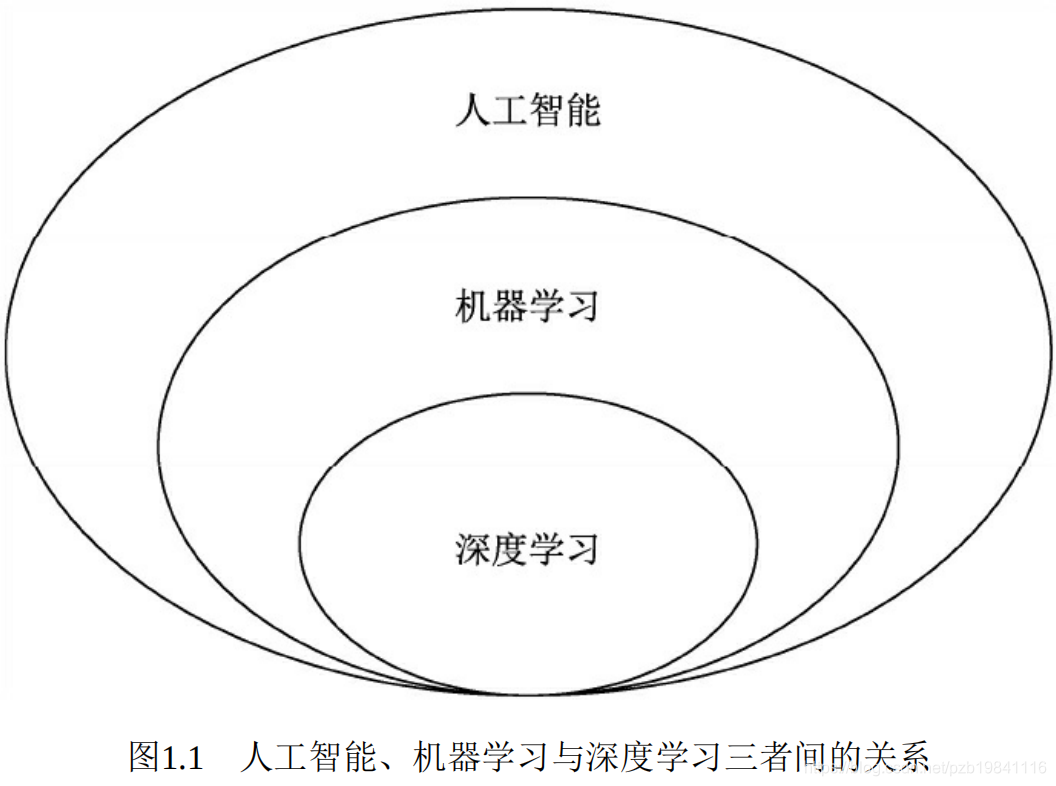
人工智能、机器学习与深度学习之间的关系。
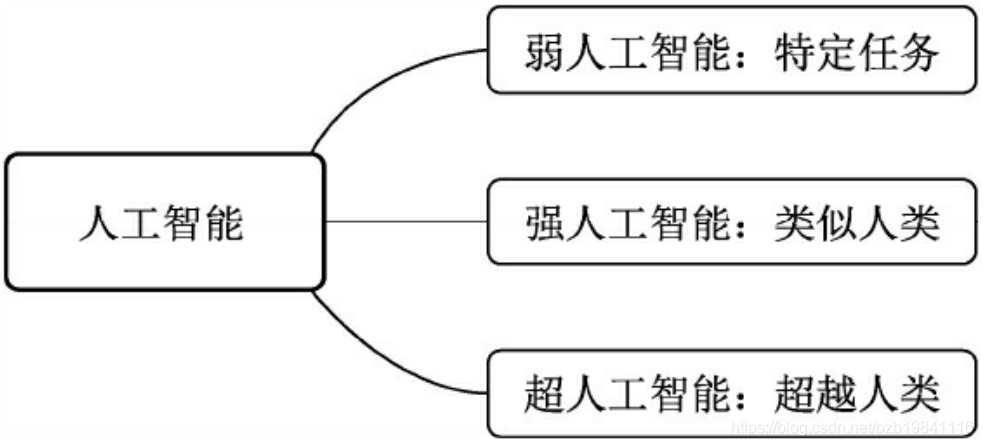
人工智能的分类。
- 弱人工智能(Artificial Narrow Intelligence,ANI):擅长某个特定任务的智能。
- 强人工智能(Artificial General Intelligence,ASI):像人一样的复杂智能。
- 超人工智能(Artificial Super Intelligence,ASI):是在所有的领域都比人类大脑聪明的智能。
机器学习的关键在于从大量的数据中找出规律,自动的学习出算法所需的参数。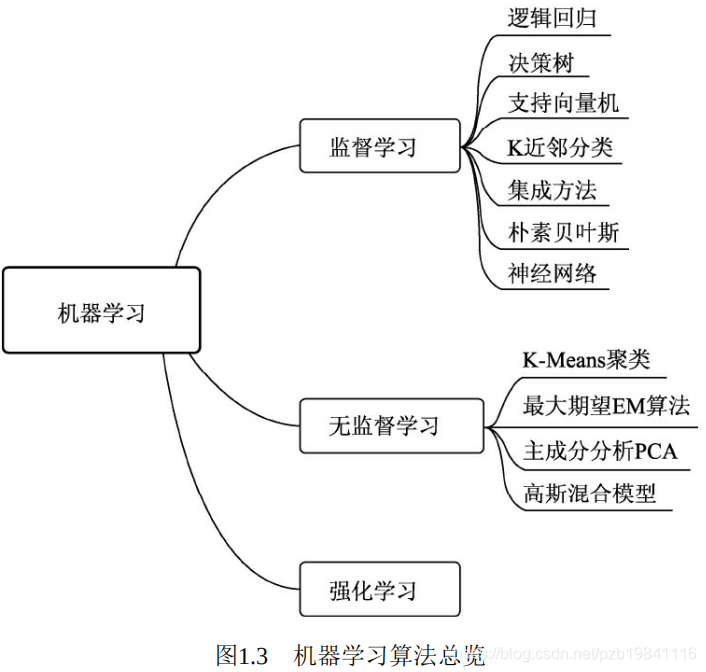
机器学习的分类。
- 监督学习:在训练时利用带有人工标注标签的数据对模型进行训练,在预测时根据训练好的模型对输入进行预测。
- 无监督学习:输入的数据没有标签信息。
强化学习:让模型在一定的环境中学习,每次行动都会有对应的奖励,目标是使奖励最大化。
深度学习主要通过搭建深层的人工神经网络来进行知识的识别,输入的数据通常较为复杂、规模大、纬度高
深度学习中的核心因素
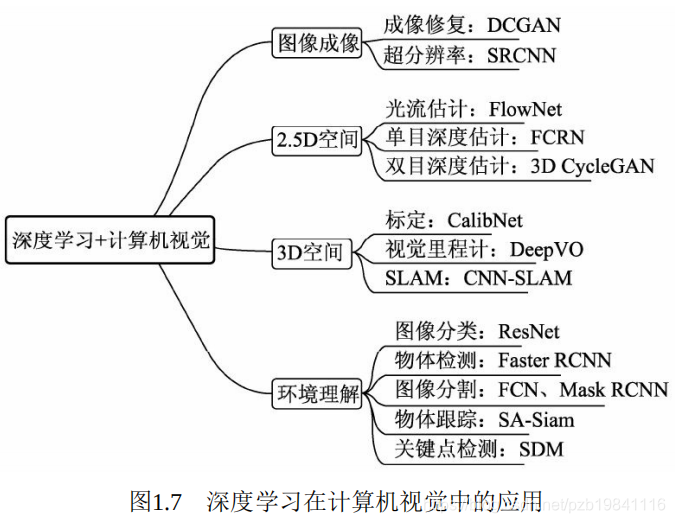
分类很细致。
物体检测技术,通常是指在一张图像中检测出物体出现的位置及对应的类别。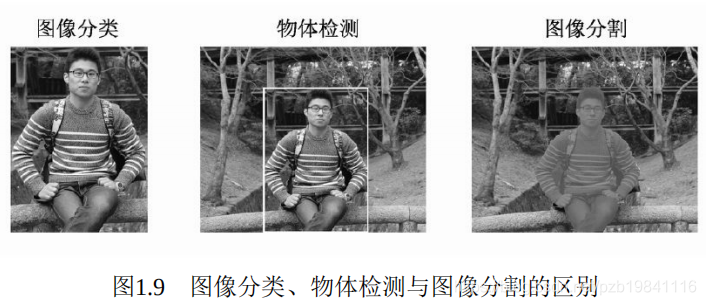
图像分类、物体检测与图像分割的区别。
- 图像分类:输入图像往往仅包含一个物体,目的是判断每张图像是什么物体。
- 物体检测:输入图像中往往有很多物体,目的是判断出物体出现的位置和类别。
- 图像分割:输入与物体检测类似,但要判断出每个像素属于哪个类别,属于像素级的分类。

传统方法的流程。
- 区域选择:选取图像中可能出现物体的位置,通常使用滑动窗口算法。
- 特征提取:使用人工设计的特征(SIFT、HOG等)对图像进行特征提取。
- 特征分类:对上一步得到的特征进行分类(SVM,AdaBoost等)。
2014的RCNN是深度学习实现物体检测的经典之作。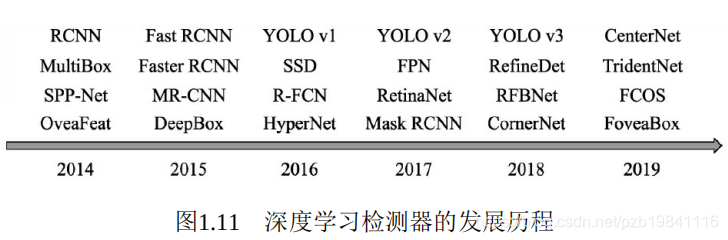
深度学习检测器的发展历程。
物体检测算法中,物体边框从无到有,边框变化的过程在一定程度上体现了检测是一阶还是二阶的。
- 二阶:第一阶段找出物体出现的位置,得到建议框,保证足够的召回率;第二阶段对建议框进行分类,找寻更精确的位置。(Faster RCNN)
- 一阶:在一个阶段中完成寻找物体出现位置与类别的预测,速度快但精度会有所损失。(SSD,YOLO)
Anchor最早出现在Faster RCNN中,本质是一系列大小宽高不等的先验框,均匀的分布在特征图上。(Faster RCNN和SSD)
通常使用IoU(Intersection of Union)来量化贴合程度。IoU的取值区间是[0,1],IoU值越大,表明两个框重合越好。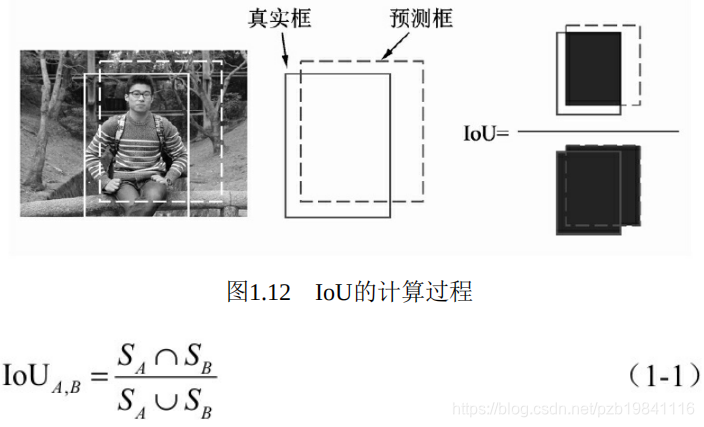
IoU的定义与计算方法。
预测框的四种结果
- 正确检测框TP(True Positive):预测框正确的与标签框匹配了。
- 误检框FP(False Positive):将背景预测成了物体。
- 漏检框FN(False Negative):本来需要检测出的物体,模型没有检测出。
- 正确背景TN(True Negative):本身是背景,模型也没有检测出来。
通常使用mAP(mean Average Precision)评价一个模型的好坏。AP是一个类别的检测精度,mAP则是多个类别的平均精度。
召回率:
准确率:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)