学习了解多模态的水下目标检测
旨在通过跨模态信息互补解决水下伪装目标跟踪的挑战,为视觉-语言联合建模提供了首个大规模基准。该数据集由220个水下视频序列组成,跨越96个类别,约159,000帧,是首个大规模多模态水下目标跟踪数据集。(如光学图像、声呐、激光雷达、深度信息、热成像等),综合利用不同模态的互补优势,提升水下复杂环境下的目标检测性能。——通过多模态数据打破单一传感器的局限性,解决水下环境的光学退化、遮挡、低对比度等问
1. 定义与核心思想
多模态水下目标检测指通过融合多种传感器或数据源(如光学图像、声呐、激光雷达、深度信息、热成像等),综合利用不同模态的互补优势,提升水下复杂环境下的目标检测性能。
其核心思想是:“模态互补,信息增强”——通过多模态数据打破单一传感器的局限性,解决水下环境的光学退化、遮挡、低对比度等问题。
2. 为什么需要多模态方法?
|
单模态局限性 |
多模态解决方案 |
|
光学图像:易受光线衰减、浑浊度影响,暗光或高噪声场景失效。 |
+ 声呐数据:穿透力强,不受光照和浑浊度限制,可检测远距离目标。 |
|
声呐数据:分辨率低,难以识别细节(如生物种类、小物体)。 |
+ 激光雷达:提供高精度3D点云,辅助目标形状和空间定位。 |
|
单一视角:遮挡问题严重(如珊瑚缝隙中的生物)。 |
+ 多视角/多光谱:联合多角度光学/红外成像,减少遮挡影响。 |
3. 关键技术:多模态数据融合
3.1 融合层次
|
融合层次 |
方法 |
优势与挑战 |
|
数据级融合 |
直接拼接原始数据(如RGB+声呐图像),输入统一网络处理。 |
保留原始信息,但需模态对齐和噪声抑制。 |
|
特征级融合 |
分别提取各模态特征(CNN/PointNet),通过注意力机制或Transformer融合。 |
灵活性高,可自适应加权重要模态(主流方法)。 |
|
决策级融合 |
各模态独立检测后融合结果(如投票、加权平均)。 |
计算效率高,但可能丢失跨模态关联信息。 |
3.2 典型融合策略
- 早期融合(Early Fusion):
- 输入层融合多模态数据(如RGB-D图像),通过共享Backbone提取特征。
- 代表模型:MMFNet(Multimodal Fusion Network)。
- 晚期融合(Late Fusion):
- 各模态独立提取特征,在检测头前融合(如Concatenation或加权求和)。
- 代表模型:Fusion-RCNN 。
- 混合融合(Hierarchical Fusion):
- 在多层网络(如FPN各阶段)动态融合不同模态特征。
- 代表模型:CMFDet(Cross-Modal Fusion Detector)。
3.3 核心模块设计
- 跨模态注意力机制:
- 使用交叉注意力(Cross-Attention)模块,让光学特征引导声呐特征增强细节。
- 案例:在YOLO的Neck部分添加跨模态注意力层 。
- 模态对齐网络:
- 解决不同模态的分辨率/时空对齐问题(如声呐与光学图像的像素级配准)。
- 方法:通过仿射变换或可变形卷积(Deformable Conv)实现空间对齐 。
- 多模态数据增强:
- 针对多模态数据设计联合增强策略(如同步随机遮挡、模态丢失模拟)。
4. 典型应用场景与SOTA模型
|
模态组合 |
应用场景 |
SOTA模型 |
创新点 |
|
RGB + 声呐 |
浑浊水域目标检测 |
MMCDet |
双流特征提取 + 自适应模态权重融合,抑制声呐噪声。 |
|
多光谱 + 激光雷达 |
水下考古与沉船检测 |
DeepFusion3D |
融合多光谱纹理与激光雷达点云,实现3D目标定位。 |
|
光学 + 热成像 |
深海热液喷口生物监测 |
Thermal-RetinaNet |
热成像辅助检测热敏感目标,通过温度阈值过滤虚警。 |
|
视频 + IMU |
水下机器人自主导航 |
VIO-Detector |
结合视觉惯性里程计(VIO)与检测模型,提升动态场景鲁棒性。 |
5. 挑战与解决方案
|
挑战 |
解决方案 |
|
模态异构性 |
设计模态特异性特征提取器(如CNN处理图像,GNN处理点云)。 |
|
数据标注成本高 |
自监督预训练(如跨模态对比学习)+ 半监督学习。 |
|
传感器时空异步 |
时间戳对齐 + 卡尔曼滤波预测中间状态。 |
|
水下传感器噪声 |
联合去噪与检测(如扩散模型生成干净数据,联合优化去噪和检测损失)。 |
![]()
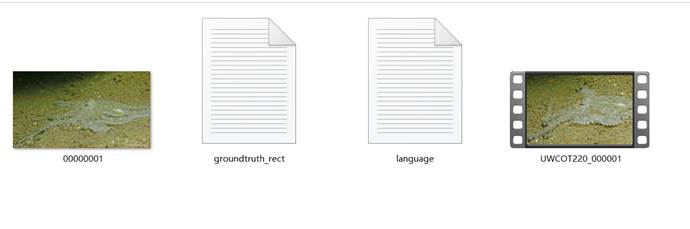
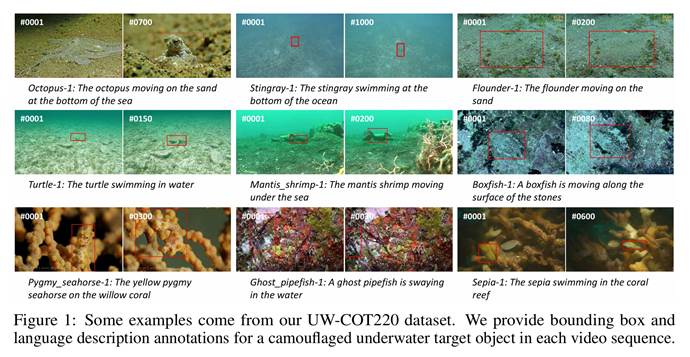
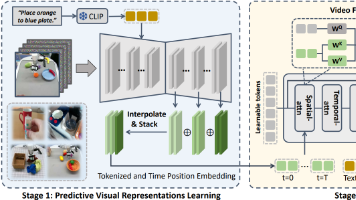
UW-COT220的“多模态”是指视觉(图像/视频+标注)与语言(文本描述)的双模态结合,旨在通过跨模态信息互补解决水下伪装目标跟踪的挑战,为视觉-语言联合建模提供了首个大规模基准。该数据集由220个水下视频序列组成,跨越96个类别,约159,000帧,是首个大规模多模态水下目标跟踪数据集。视频来自https://www.youtube.com/,数据已进行手动标注。
缺点是一个视频图像中只有一个类别目标
|
|
|



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)