登录社区云,与社区用户共同成长
邀请您加入社区
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
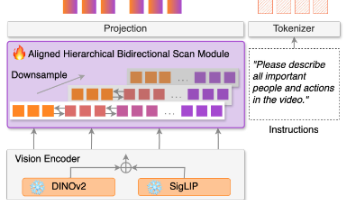
ABMamba:基于深度状态空间模型的高效视频字幕生成
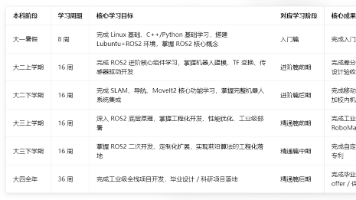
机器人工程专业:Lubuntu 26.04 + ROS2 Lyrical Luth 入门、进阶、精通全指南
机器人关节空间的轨迹规划
机械手轨迹规划方法主要包括关节空间和直角坐标空间两种方式。关节空间规划通过插值函数(如三次或五次多项式)在路径点间生成平滑轨迹,需满足位置、速度和加速度约束;直角坐标空间规划则需将路径解析式转换为关节坐标约束。关键点在于保证轨迹连续性,避免奇异性和碰撞。三次多项式适用于简单起止点运动,高阶多项式可处理更复杂约束。路径规划侧重几何连接,而轨迹规划则需加入时间参数,控制运动过程中的速度与加速度。两种方
扫一扫分享内容













 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)