机器人工程专业:Lubuntu 26.04 + ROS2 Lyrical Luth 入门、进阶、精通全指南
本指南面向机器人工程专业,适配轻量型 Lubuntu 26.04 系统与 ROS2 Lyrical Luth 发行版,按入门、进阶、精通三阶构建全路径学习体系,覆盖环境搭建、核心概念、组件开发、SLAM 导航、底层原理、工业级部署等核心内容,配套分阶段实践项目、本科 4 年学习规划与高频问题排查方案,全面适配专业教学、学科竞赛、科研创新与工业落地全场景需求。
机器人工程专业全周期学习时间规划(本科 4 年)
本指南面向机器人工程专业,适配轻量型 Lubuntu 26.04 系统与 ROS2 Lyrical Luth 发行版,按入门、进阶、精通三阶构建全路径学习体系,覆盖环境搭建、核心概念、组件开发、SLAM 导航、底层原理、工业级部署等核心内容,配套分阶段实践项目、本科 4 年学习规划与高频问题排查方案,全面适配专业教学、学科竞赛、科研创新与工业落地全场景需求。
机器人工程专业:Lubuntu 26.04 + ROS2 Lyrical Luth 入门、进阶、精通全指南
Lubuntu 26.04 是 Ubuntu 26.04 LTS 官方认证的轻量级衍生版,搭载 LXQt 桌面环境,最低仅需 1GB 内存即可流畅运行,空闲状态内存占用仅 600MB 左右,完美适配学生老旧笔记本、机器人工控机、树莓派 / Jetson 等边缘硬件;同时完全兼容 Ubuntu 26.04 软件源,是 ROS2 Lyrical Luth 官方 Tier1 最高支持的目标平台,还保留了 X11 显示协议,彻底解决了 Ubuntu 26.04 默认 Wayland 环境下 ROS2 可视化工具的兼容性问题。
ROS2 Lyrical Luth 是 ROS 2 的第十二个官方长期支持发行版,提供 5 年官方维护周期,聚焦插件系统增强、生命周期节点生态完善、日志系统灵活性提升三大核心方向,与机器人工程专业的教学、竞赛、科研、工业部署需求高度契合。
本指南专为机器人工程专业学生打造,遵循「理论打底 - 实践驱动 - 工程落地 - 科研创新」的专业培养逻辑,从系统安装到工业级项目全流程覆盖,全程贴合 Lubuntu 26.04 的系统特性与 ROS2 Lyrical Luth 的版本新特性,帮助你循序渐进完成从入门到精通的全路径学习。
前置知识储备(学习前自查)
必学基础(无则无法顺利入门)
- Linux 基础:掌握文件管理、用户权限、软件安装、终端命令、Shell 脚本基础操作
- 编程语言:C++20 基础语法(对应 ROS2 L 版本语言基线)、Python 3.12+ 基础编程能力
- 专业基础:机器人学基础(坐标变换、刚体运动学)、自动控制原理基础、线性代数基础
选学加分(提升学习效率)
数字信号处理、机器视觉基础、SLAM 基础理论、C++ 模板编程、Linux 系统原理、单片机 / 嵌入式开发基础
第一阶段:入门篇(学习周期 4-8 周)
核心目标
完成 Lubuntu 26.04 系统安装与 ROS2 专属优化,搭建可稳定运行的 ROS2 Lyrical Luth 开发环境;掌握 ROS2 核心概念与基础操作,能独立完成简单机器人节点的开发、调试与运行,跑通入门级机器人通信项目。
一、Lubuntu 26.04 系统安装与 ROS2 专属优化
1. 系统安装(适配机器人开发场景)
(1)系统镜像获取
Lubuntu 26.04 官方镜像分为 x86_64(PC / 工控机)和 ARM64(树莓派 / Jetson)两个架构,直接从官方地址下载:
bash
运行
# x86_64 桌面版镜像
wget https://cdimage.ubuntu.com/lubuntu/releases/26.04/release/lubuntu-26.04-desktop-amd64.iso
# ARM64 嵌入式版镜像
wget https://cdimage.ubuntu.com/lubuntu/releases/26.04/release/lubuntu-26.04-desktop-arm64.iso
使用 Rufus/balenaEtcher 制作 U 盘启动盘,BIOS 关闭 Secure Boot,从 U 盘启动后跟随向导完成安装。
(2)机器人开发专属分区建议
针对机器人开发场景,避免后续磁盘空间不足、系统崩溃导致数据丢失,推荐分区方案:
表格
| 分区 | 大小 | 格式 | 挂载点 | 说明 |
|---|---|---|---|---|
| EFI 系统分区 | 512MB | FAT32 | /boot/efi | 必选,引导系统启动 |
| SWAP 交换分区 | 内存 2 倍(最大 16GB) | swap | - | 低内存设备必选,缓解内存压力 |
| 系统分区 | 不低于 60GB | EXT4 | / | 安装系统与 ROS2 环境,推荐 SSD |
| 数据分区 | 剩余全部空间 | EXT4 | /home | 存放机器人项目、数据集、仿真环境 |
2. 系统安装后 ROS2 专属优化
Lubuntu 26.04 本身资源占用极低,以下优化专为机器人开发打造,解决后续 ROS2 运行的潜在问题:
bash
运行
# 1. 更换国内软件源,解决下载慢的问题(清华源,26.04专用)
sudo sed -i 's/archive.ubuntu.com/mirrors.tuna.tsinghua.edu.cn/g' /etc/apt/sources.list
sudo sed -i 's/security.ubuntu.com/mirrors.tuna.tsinghua.edu.cn/g' /etc/apt/sources.list
# 2. 系统更新与基础开发工具安装
sudo apt update && sudo apt upgrade -y
sudo apt install -y git curl wget vim build-essential cmake g++ python3-pip net-tools openssh-server
# 3. 开启SSH服务,实现远程开发(机器人工控机必配)
sudo systemctl enable ssh --now
sudo ufw allow ssh # 放行防火墙SSH端口
# 4. 解决ROS2可视化工具兼容性问题(Lubuntu默认X11,无需额外切换Wayland)
# 安装3D加速与图形库,保障rviz2、gazebo正常运行
sudo apt install -y mesa-utils libgl1-mesa-glx libglu1-mesa libopencv-dev
# 5. 低内存设备优化:关闭不必要的后台服务,释放资源
sudo systemctl disable --now bluetooth modemmanager cups
3. 实时内核可选安装(进阶提前准备)
工业机器人、实时控制场景需要 Linux 实时内核,Lubuntu 26.04 可直接安装官方 PREEMPT_RT 实时内核:
bash
运行
sudo apt install -y linux-image-rt-generic linux-headers-rt-generic
# 安装后重启,在GRUB引导界面选择实时内核启动
二、ROS2 Lyrical Luth 环境搭建(3 种方式,按需选择)
Lubuntu 26.04 完全兼容 Ubuntu 26.04 的 ROS2 软件源,三种安装方式适配不同场景,入门优先选择 apt 预编译包安装。
方式 1:apt 预编译包安装(官方推荐,入门首选)
- 配置 ROS2 软件源与密钥
bash
运行
# 安装源依赖
sudo apt install -y software-properties-common
sudo add-apt-repository universe
# 添加ROS2官方GPG密钥
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
# 添加ROS2软件源(清华源,国内加速)
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu noble main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
- 安装 ROS2 Lyrical Luth 版本根据设备配置选择安装包,低内存设备推荐
ros-lyrical-base,带图形界面的学习设备推荐ros-lyrical-desktop:
bash
运行
sudo apt update
# 完整版(含可视化工具、仿真、所有核心功能,学习推荐)
sudo apt install -y ros-lyrical-desktop-full
# 基础版(仅核心库,无可视化,工控机/嵌入式推荐)
sudo apt install -y ros-lyrical-ros-base
# 极简版(仅核心通信库,极致轻量化,边缘设备推荐)
sudo apt install -y ros-lyrical-core
- 环境配置与验证
bash
运行
# 1. 配置环境变量,每次打开终端自动加载ROS2环境
echo "source /opt/ros/lyrical/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 2. 安装rosdep依赖管理工具
sudo apt install -y python3-rosdep
sudo rosdep init
rosdep update # 国内失败可换国内rosdep源
# 3. 核心功能验证:跑通talker-listener经典demo
# 终端1:启动发布者节点
ros2 run demo_nodes_cpp talker
# 终端2:启动订阅者节点
ros2 run demo_nodes_py listener
# 4. ROS2 L版本新特性验证:动态日志后端切换
# 默认spdlog后端,会生成日志文件
ros2 run demo_nodes_cpp talker
# 切换至noop后端,关闭磁盘日志写入,仅保留标准输出
export RCL_LOGGING_IMPLEMENTATION=rcl_logging_noop
ros2 run demo_nodes_cpp talker
方式 2:Docker 容器化安装(多版本隔离、部署推荐)
Lubuntu 低资源环境下,Docker 可实现 ROS2 环境的隔离与快速复用,避免环境冲突:
bash
运行
# 1. 安装Docker
curl -fsSL get.docker.com | sudo sh
sudo usermod -aG docker $USER # 免sudo运行docker,重启终端生效
# 2. 拉取ROS2 Lyrical官方镜像
docker pull ros:lyrical-desktop
# 3. 启动容器,开启图形界面与网络共享
docker run -it --rm \
--net=host \
--env DISPLAY=$DISPLAY \
-v /tmp/.X11-unix:/tmp/.X11-unix \
ros:lyrical-desktop \
bash
方式 3:源码编译安装(定制化、二次开发推荐)
适合需要修改 ROS2 核心源码、定制功能的场景,Lubuntu 26.04 需提前安装编译依赖:
bash
运行
# 1. 安装编译依赖
sudo apt install -y python3-colcon-common-extensions python3-vcstool
# 2. 创建工作空间,拉取源码
mkdir -p ~/ros2_lyrical/src
cd ~/ros2_lyrical
vcs import --input https://raw.githubusercontent.com/ros2/ros2/lyrical/ros2.repos src
# 3. 安装依赖
rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"
# 4. 全源码编译(低内存设备添加--parallel-workers 2限制线程数,避免内存溢出)
colcon build --symlink-install --parallel-workers 2
# 5. 加载编译后的环境
echo "source ~/ros2_lyrical/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
三、ROS2 核心概念与基础操作(机器人工程专业必掌握)
本部分是 ROS2 开发的核心基础,每个概念都需理解「是什么、解决什么问题、怎么用」,结合机器人开发场景落地。
表格
| 核心概念 | 核心定义 | 机器人开发场景 | 基础操作命令 |
|---|---|---|---|
| 节点(Node) | ROS2 系统的最小执行单元,每个节点负责一个单一功能(如相机驱动、路径规划),是机器人系统的「功能模块」 | 一个机器人系统由多个节点组成:相机节点、激光雷达节点、里程计节点、导航节点,解耦开发,便于维护与复用 | 运行节点:ros2 run 包名 节点名查看运行节点:ros2 node list查看节点详情:ros2 node info 节点名 |
| 话题(Topic) | 节点间异步通信的核心机制,采用发布 - 订阅(Publish-Subscribe)模型,一个话题可被多个节点发布 / 订阅 | 高频数据流传输:相机图像、激光雷达点云、机器人里程计、关节状态等连续型数据 | 查看话题列表:ros2 topic list订阅话题数据:ros2 topic echo 话题名发布话题数据:ros2 topic pub 话题名 消息类型 数据查看话题带宽:ros2 topic bw 话题名 |
| 服务(Service) | 节点间同步通信的核心机制,采用客户端 - 服务器(Client-Server)模型,一对一一问一答,适用于有明确结果返回的场景 | 机器人启停、参数修改、地图保存、拍照指令等触发式操作 | 查看服务列表:ros2 service list调用服务:ros2 service call 服务名 服务类型 数据查看服务类型:ros2 service type 服务名 |
| 动作(Action) | 基于话题 + 服务的进阶通信机制,支持目标发送、进度反馈、结果返回、过程取消,适用于长时间执行的任务 | 机器人导航、机械臂运动规划、机械臂抓取、自动充电等长时间执行的任务 | 查看动作列表:ros2 action list发送动作目标:ros2 action send_goal 动作名 动作类型 数据 |
| 参数(Parameter) | 节点的配置项,支持运行时动态修改,无需重启节点 | 机器人 PID 参数、相机帧率、导航速度限制、传感器阈值等可配置参数 | 查看节点参数:ros2 param list 节点名获取参数值:ros2 param get 节点名 参数名设置参数值:ros2 param set 节点名 参数名 值参数文件加载:ros2 param load 节点名 参数文件.yaml |
| 工作空间(Workspace) | ROS2 项目的开发目录,固定结构为src/(源码)、build/(编译中间文件)、install/(编译输出)、log/(日志) |
所有机器人项目都需在工作空间中开发,实现多包管理与编译 | 创建工作空间:mkdir -p 工作空间名/src && cd 工作空间名 && colcon build加载工作空间环境:source install/setup.bash |
| 功能包(Package) | ROS2 软件的最小分发单元,包含节点源码、消息定义、配置文件、依赖声明,是代码复用与分发的载体 | 一个功能包对应一个机器人功能模块,如相机驱动包、导航算法包、机械臂控制包 | 创建功能包:ros2 pkg create --build-type ament_cmake 包名 --dependencies rclcpp std_msgs查找功能包路径:ros2 pkg prefix 包名 |
| colcon 构建工具 | ROS2 官方编译构建工具,支持 C++/Python 代码的统一编译、依赖管理、增量编译 | 所有 ROS2 项目的编译、打包、安装都通过 colcon 完成 | 全量编译:colcon build增量编译单个包:colcon build --packages-select 包名安装 symlink:colcon build --symlink-install |
四、入门级综合实践项目(3 个梯度,必做)
所有项目均在 Lubuntu 26.04 环境下开发,贴合机器人工程专业的入门实践要求,循序渐进提升开发能力。
项目 1:turtlesim 海龟速度闭环控制
核心目标:掌握话题的发布与订阅,理解 ROS2 节点的开发流程开发内容:
- 编写 C++/Python 节点,订阅海龟的里程计话题
turtle1/pose,获取海龟实时位置与速度 - 编写速度控制逻辑,发布速度指令话题
turtle1/cmd_vel,实现海龟的定点运动、圆周运动、速度闭环控制 - 通过 launch 文件一键启动海龟仿真节点与自定义控制节点
项目 2:自定义机器人消息与服务接口开发
核心目标:掌握 ROS2 自定义接口的开发规范,理解服务通信的开发流程开发内容:
- 自定义机器人状态消息
RobotStatus.msg,包含机器人速度、电池电量、运行状态、故障码字段 - 自定义机器人启停服务
RobotControl.srv,包含启停指令、超时时间请求字段,与执行结果、错误信息响应字段 - 开发服务端节点,接收启停指令,控制机器人状态,发布实时状态话题
- 开发客户端节点,发送控制指令,接收服务响应,打印机器人状态
项目 3:多传感器数据同步采集系统
核心目标:掌握 ROS2 多节点协同、launch 文件高级配置、参数管理开发内容:
- 模拟 3 个传感器节点(温度、IMU、里程计),分别以不同频率发布传感器数据话题
- 开发数据同步节点,订阅 3 个传感器话题,实现时间同步的数据采集与存储
- 通过 YAML 参数文件配置传感器采样频率、数据存储路径、同步阈值
- 通过 launch 文件实现多节点的批量启动、参数加载、命名空间管理
五、入门阶段避坑指南(Lubuntu 26.04 专属)
- 环境变量不生效:每次打开新终端都需要重新 source 环境,解决方法是将 source 命令写入
~/.bashrc,注意区分系统 ROS 环境与工作空间环境的加载顺序 - 可视化工具黑屏 / 闪退:Lubuntu 默认 X11 环境不会出现 Wayland 兼容性问题,若出现闪退,大概率是显卡驱动缺失,执行
sudo apt install mesa-utils安装 3D 加速库即可 - 编译时内存溢出:低内存设备编译时,colcon 添加
--parallel-workers 2限制编译线程数,同时增大 SWAP 交换分区大小 - rosdep update 失败:国内网络环境下,更换国内 rosdep 源,参考「rosdepc 清华源」配置方案
- 多节点运行卡顿:Lubuntu 关闭不必要的后台服务,同时通过
ros2 topic bw检查是否有高频大流量话题占用带宽,优化 QoS 配置
第二阶段:进阶篇(学习周期 12-16 周)
核心目标
熟练掌握 ROS2 Lyrical Luth 核心组件的深度开发,吃透版本新增的生命周期节点、带参插件系统、动态日志等核心特性;完成机器人 SLAM 建图、自主导航、运动规划等核心功能的开发;能独立完成完整机器人系统的集成与调试,适配机器人工程专业的课程设计、学科竞赛需求。
一、ROS2 Lyrical Luth 核心组件深度开发
本部分聚焦 ROS2 L 版本的核心新特性,也是机器人工程专业进阶开发的核心能力,每个模块都配套机器人开发实战案例。
1. 生命周期节点(LifecycleNode)开发
生命周期节点是 ROS2 针对工业机器人场景设计的核心特性,为节点定义了标准的状态机(未配置、未激活、激活、关闭、错误处理),实现机器人节点的标准化状态管理,ROS2 L 版本中image_transport和point_cloud_transport已原生支持生命周期节点。
核心开发流程:
- 继承
rclcpp_lifecycle::LifecycleNode基类,实现 5 个核心状态回调函数:on_configure:配置阶段,加载参数、初始化硬件、申请内存on_activate:激活阶段,启动传感器、开启发布订阅、使能控制on_deactivate:去激活阶段,停止传感器、关闭发布订阅、暂停控制on_cleanup:清理阶段,释放内存、关闭硬件句柄on_shutdown:关闭阶段,节点退出前的资源释放
- 通过生命周期管理器节点,实现多节点的统一状态管理与联动
- 支持错误状态自动处理,实现机器人节点的故障自愈
实战案例:基于生命周期节点的工业相机驱动开发
- 需求:实现 USB 相机的标准化驱动,支持参数配置、启停控制、故障自动重启,适配工业场景的高可靠性要求
- 开发要点:
on_configure阶段:加载相机分辨率、帧率、曝光参数,打开相机设备,初始化 image_transport 发布者on_activate阶段:启动相机采集线程,开启图像话题发布on_deactivate阶段:停止采集线程,暂停图像发布on_cleanup阶段:关闭相机设备,释放图像缓冲区- 错误回调:相机断连时自动进入错误状态,尝试重连,恢复后自动回到激活状态
- 基于 ROS2 L 版本 image_transport 的原生生命周期支持,实现图像压缩传输的状态联动
2. 插件系统(pluginlib + class_loader)深度开发
ROS2 L 版本对插件系统进行了核心升级,新增向插件构造函数传递参数的能力,彻底消除了对initialize()初始化方法的依赖,支持非默认构造的插件类开发,是机器人算法模块化、可插拔开发的核心工具Ubuntu。
核心升级特性:
- 新增模板结构体
InterfaceTraits自定义扩展点,通过特化该模板定义插件构造函数的入参签名,编译期类型安全校验 - 完全向后兼容,未特化
InterfaceTraits时默认使用无参构造函数,原有插件代码无需修改 - 上层 pluginlib 完全对接底层 class_loader 的新特性,开发者可直接使用,无需关注底层实现
实战案例:自定义导航路径规划插件开发
- 需求:基于 Nav2 导航框架,开发自定义全局路径规划插件,支持构造函数传入节点参数、规划器配置,实现算法的模块化热插拔
- 开发要点:
- 定义规划器基类接口,特化
InterfaceTraits结构体,声明构造函数入参(节点参数、规划器配置结构体) - 实现自定义规划算法类,继承基类,实现带参构造函数,在构造函数中完成算法初始化,无需额外的
initialize()方法 - 通过
PLUGINLIB_EXPORT_CLASS宏注册插件,编写插件描述 XML 文件 - 在 Nav2 配置文件中替换默认规划器为自定义插件,实现算法的无缝替换
- 实现算法参数的运行时动态修改,支持多场景下的规划器配置切换
- 定义规划器基类接口,特化
3. 通信机制进阶与中间件适配
ROS2 L 版本将rmw_zenoh_cpp正式纳入 Tier1 支持,同时优化了 DDS 中间件的适配能力,开发者可根据机器人场景灵活选择通信中间件,实现低延迟、高可靠的通信。
核心进阶内容:
- QoS 服务质量深度配置:针对不同场景配置 QoS 策略,保障通信可靠性
- 传感器高频数据:BEST_EFFORT 尽力而为模式 + VOLATILE 瞬态模式,降低延迟,减少丢包
- 控制指令、状态数据:RELIABLE 可靠模式 + TRANSIENT_LOCAL 瞬态本地模式,保障数据必达
- 地图、配置数据:RELIABLE 可靠模式 + TRANSIENT_LOCAL 持久化模式,实现晚加入节点的历史数据订阅
- 多中间件切换与适配:
- 默认
rmw_fastrtps_cpp:通用机器人场景,轻量高性能 rmw_zenoh_cpp:广域网、云边端协同、低带宽场景,支持跨地域通信rmw_cyclonedds_cpp:嵌入式、低资源设备,低内存占用- 切换方式:仅需设置环境变量
export RMW_IMPLEMENTATION=rmw_zenoh_cpp,无需修改业务代码
- 默认
- 多机通信配置:基于 DDS 域 ID 实现多机器人网络隔离,通过 ROS_DOMAIN_ID 环境变量配置,同一域内的节点可自动发现通信
实战案例:激光雷达低延迟传输优化
- 需求:实现 10Hz 32 线激光雷达点云数据的低延迟传输,在 Lubuntu 工控机上实现端到端延迟 < 50ms
- 开发要点:
- 配置 QoS 策略:BEST_EFFORT 可靠性 + 深度为 10 的历史队列 + 自动分片传输
- 切换至
rmw_cyclonedds_cpp中间件,优化嵌入式设备的内存占用与传输延迟 - 启用零拷贝传输机制,减少大流量点云数据的内存拷贝开销
- 通过
ros2 topic bw和ros2 topic delay工具测试传输带宽与延迟,持续优化配置
4. 日志系统进阶与动态管理
ROS2 L 版本新增rcl_logging_implementation包,实现了日志后端的运行时动态加载,无需重新编译 rcl 核心库,仅通过环境变量即可切换日志后端,是机器人生产部署、运维调试的核心工具。
核心进阶内容:
- 日志后端动态切换:
- 默认
rcl_logging_spdlog:标准日志后端,支持文件写入、日志轮转、格式定制 rcl_logging_noop:无操作后端,关闭磁盘日志写入,仅保留标准输出,减少生产环境磁盘 IO 占用- 自定义后端:支持对接 syslog、FluentBit、企业级日志平台,实现日志的远程采集与分析
- 默认
- 日志分级与过滤:ROS2 日志分为 Debug、Info、Warn、Error、Fatal 五个等级,支持运行时动态修改节点日志等级,无需重启节点
- 日志格式定制:自定义日志输出格式,添加时间戳、节点名、线程 ID、文件名等字段,便于问题排查
实战案例:工业机器人生产环境日志管理
- 需求:实现机器人系统的分级日志管理,开发调试阶段输出全量日志,生产环境关闭磁盘写入,同时对接远程日志平台实现异常日志采集
- 开发要点:
- 开发调试阶段:使用 spdlog 后端,配置 Debug 级日志输出,开启日志文件轮转,限制单日志文件大小与总日志数量
- 生产部署阶段:通过环境变量
export RCL_LOGGING_IMPLEMENTATION=rcl_logging_noop切换至 noop 后端,关闭磁盘日志写入,仅保留 Error 级以上标准输出 - 运维场景:对接 syslog 后端,将异常日志发送至远程 FluentBit 日志平台,实现多机器人集群的日志集中管理与告警
- 运行时动态调整:通过
ros2 param set命令动态修改节点日志等级,线上问题排查时临时开启 Debug 日志,无需重启机器人程序
5. 机器人建模与坐标变换
核心进阶内容:
- URDF/SDF 机器人建模:掌握差分驱动机器人、轮式机器人、机械臂的 URDF 建模方法,实现机器人连杆、关节、碰撞体、视觉模型的定义,添加传感器(相机、激光雷达、IMU)的 URDF 集成
- TF2 坐标变换系统:掌握 TF2 树的构建、坐标变换的发布与监听、时间同步的坐标变换查询,实现机器人基坐标系、里程计坐标系、地图坐标系、传感器坐标系的全链路变换
- 机器人可视化:基于 rviz2 实现机器人模型可视化、TF 树可视化、传感器数据可视化、导航路径可视化,完成机器人系统的调试与验证
实战案例:差分驱动移动机器人 URDF 建模与 TF 发布
- 需求:完成两轮差分驱动机器人的 URDF 建模,集成激光雷达、IMU、相机传感器,实现里程计 TF 发布,在 rviz2 中完成可视化验证
- 开发要点:
- 编写 URDF 文件,定义机器人底盘、两个驱动轮、万向轮的连杆与关节,添加碰撞体与视觉模型
- 在 URDF 中集成激光雷达、IMU、相机的传感器模型,定义相对基坐标系的安装位置
- 编写里程计节点,基于轮速编码器数据计算机器人里程,发布
odom -> base_link的 TF 变换 - 编写 IMU 数据融合节点,发布
base_link -> imu_link的 TF 变换 - 通过 robot_state_publisher 发布机器人关节状态与 TF 静态变换,在 rviz2 中加载 URDF 模型,验证 TF 树与传感器数据的可视化
6. 感知传输组件深度应用
ROS2 L 版本中image_transport和point_cloud_transport已全面支持生命周期节点,实现了传感器数据的压缩传输、状态管理,是机器人视觉、3D 感知开发的核心组件。
核心进阶内容:
- image_transport 进阶:支持图像的压缩传输(compressed、theora 等格式),大幅降低图像传输的带宽占用,原生支持生命周期节点,实现相机驱动的标准化状态管理
- point_cloud_transport 进阶:支持点云数据的压缩传输(draco 格式),减少 3D 点云数据的带宽占用,适配激光雷达、3D 相机的大数据量传输场景
- 传感器数据时间同步:基于 message_filters 实现多传感器数据的时间同步,实现相机图像 + 激光雷达点云、双目相机图像的同步采集与融合
实战案例:3D 视觉抓取系统的感知传输开发
- 需求:实现双目相机 + 3D 结构光相机的数据采集与压缩传输,完成多相机数据的时间同步,适配机械臂视觉抓取的低延迟需求
- 开发要点:
- 基于生命周期节点开发双目相机驱动,通过 image_transport 实现左右目图像的压缩发布,支持相机的启停、参数配置、故障处理
- 基于 point_cloud_transport 实现 3D 结构光相机的点云数据压缩传输,使用 draco 压缩算法,降低带宽占用 70% 以上
- 基于 message_filters 的 TimeSynchronizer 实现双目图像与点云数据的时间同步,同步精度 < 10ms
- 在 Lubuntu 低配置工控机上完成性能优化,实现 30Hz 图像 + 10Hz 点云的稳定传输,CPU 占用 < 15%
二、机器人核心功能包实战
本部分对应机器人工程专业的核心课程(SLAM 技术、机器人导航、机器人运动控制),是进阶学习的核心,所有功能包均已适配 ROS2 Lyrical Luth 版本。
1. SLAM 与环境建图
核心学习内容:
- 掌握 ROS2 主流 SLAM 框架的使用与配置:SLAM Toolbox(官方推荐)、Cartographer、GMapping
- 完成激光 SLAM 从硬件驱动、数据预处理、建图参数调优、地图保存与加载的全流程开发
- 掌握视觉 SLAM(ORB-SLAM3、RTAB-Map)与 ROS2 的集成,实现视觉里程计与稠密建图
- 基于 Lubuntu 工控机完成 SLAM 性能优化,适配低配置设备的实时建图需求
核心实战:在真实差分驱动机器人上,完成室内环境的激光 SLAM 建图,构建栅格地图,实现地图的优化与保存,为后续自主导航提供地图基础。
2. 自主导航 Navigation2
核心学习内容:
- 掌握 Nav2 导航框架的架构与核心模块:行为树、全局路径规划器、局部路径规划器、代价地图、行为服务器、恢复器
- 完成 Nav2 的参数配置与调优,适配不同机器人底盘、不同场景的导航需求
- 基于 ROS2 L 版本的插件系统,开发自定义全局规划器、局部规划器、行为恢复器插件
- 实现导航点位管理、自动避障、动态障碍物规避、安全边界控制等工业级导航功能
核心实战:基于 SLAM 构建的地图,完成机器人的自主导航系统开发,实现定点导航、多点巡航、自动避障、紧急停止功能,在真实环境中完成导航稳定性与精度测试。
3. 机械臂运动规划 MoveIt2
核心学习内容:
- 掌握 MoveIt2 的架构与核心功能:运动学求解、运动规划、碰撞检测、轨迹执行、抓取规划
- 完成 6 轴机械臂的 URDF 建模、MoveIt2 配置助手使用、运动规划场景配置
- 实现机械臂的关节空间规划、笛卡尔空间规划、避障规划、拖拽示教功能
- 基于 ROS2 动作机制,实现机械臂运动规划的目标发送、进度反馈、过程取消
核心实战:完成 6 轴协作机械臂的运动规划与视觉抓取系统开发,结合 3D 视觉实现目标物体的识别与定位,通过 MoveIt2 规划机械臂运动轨迹,完成自动化抓取与放置任务。
三、进阶级综合实践项目(必做,适配课程设计 / 竞赛)
项目 1:差分驱动移动机器人 SLAM 与自主导航系统
项目背景:对应机器人工程专业《移动机器人技术》《SLAM 技术》课程设计,适配 RoboMaster、RoboCup 等竞赛的移动机器人基础需求核心开发内容:
- 机器人硬件适配:完成差分驱动底盘的 ROS2 驱动开发,实现轮速控制、编码器数据采集、里程计计算
- 传感器驱动开发:基于 ROS2 L 版本生命周期节点,开发激光雷达、IMU、超声波传感器的驱动,实现标准化状态管理
- SLAM 建图:基于 SLAM Toolbox 完成室内环境的激光 SLAM 建图,构建高精度栅格地图
- 自主导航:基于 Nav2 框架完成导航系统开发,配置全局规划器与局部规划器,实现定点导航、多点巡航、动态避障
- 系统集成:通过 launch 文件实现机器人全节点的一键启动,通过 rviz2 实现人机交互与监控,在 Lubuntu 26.04 工控机上完成稳定部署
- 性能优化:针对低配置工控机优化 CPU 与内存占用,实现导航系统 24 小时稳定运行
项目 2:6 轴机械臂视觉抓取系统
项目背景:对应机器人工程专业《机器人运动学》《机器视觉》课程设计,适配工业机器人、协作机器人开发需求核心开发内容:
- 机械臂建模与配置:完成 6 轴机械臂的 URDF 建模,通过 MoveIt2 配置助手完成运动规划配置,添加碰撞检测模型
- 视觉感知系统:基于 ROS2 L 版本 image_transport 开发工业相机驱动,实现图像的压缩传输与生命周期管理,基于 YOLO 算法实现目标物体的检测与定位
- 手眼标定:完成相机与机械臂的手眼标定,实现图像坐标系到机械臂基坐标系的变换
- 运动规划与抓取:基于 MoveIt2 实现机械臂的运动规划,结合视觉定位结果实现目标物体的自动化抓取与放置
- 状态管理:基于生命周期节点实现相机、机械臂驱动的统一状态管理,支持故障自动处理、急停安全控制
- 人机交互:开发简易的上位机界面,实现抓取目标选择、机械臂手动控制、任务流程监控
四、进阶阶段 Lubuntu 专属优化与避坑指南
- 多节点运行内存占用过高:Lubuntu 系统中通过
htop工具查看节点内存占用,关闭不必要的 ROS2 节点与系统服务;使用ros-lyrical-base版本替代完整版,移除不必要的可视化组件 - rviz2/gazebo 仿真卡顿:开启显卡 3D 加速,降低仿真场景的模型面数、传感器更新频率;Lubuntu 关闭桌面特效,释放 GPU 资源
- 插件开发编译错误:带参构造函数插件开发时,注意
InterfaceTraits模板的特化必须与插件类的构造函数签名完全一致,否则会出现编译期模板推导错误;Windows 平台 MSVC 编译器的适配问题可参考官方 PR 的修复方案Ubuntu - 生命周期节点状态联动异常:多生命周期节点联动时,必须使用生命周期管理器统一管理,避免节点状态不同步导致的硬件操作异常;完善错误回调函数的处理逻辑,避免节点卡死在错误状态
- 多机通信发现失败:同一局域网内的多机通信,需确保 ROS_DOMAIN_ID 完全一致,关闭防火墙,DDS 配置文件中开启多播功能;跨网段通信推荐使用
rmw_zenoh_cpp中间件,无需复杂的网络配置
第三阶段:精通篇(学习周期 20-24 周)
核心目标
吃透 ROS2 底层原理与源码实现,掌握 ROS2 工业级工程化开发、性能优化、系统部署的全流程能力;能基于 ROS2 L 版本进行二次开发与定制化扩展;具备机器人前沿算法的工程化落地能力,能独立完成工业级机器人系统的全栈开发,适配机器人工程专业的毕业设计、科研创新、顶级竞赛需求。
一、ROS2 Lyrical Luth 底层原理与源码解析
1. ROS2 核心架构与分层原理
ROS2 采用分层架构设计,从下到上分为 5 层,精通每层的实现原理是二次开发与问题排查的核心:
表格
| 架构层级 | 核心模块 | 核心功能 | L 版本核心变更 |
|---|---|---|---|
| DDS 中间件层 | Fast-DDS、Cyclone DDS、Zenoh | 底层数据分发、发现机制、QoS 保障 | 新增 Zenoh Tier1 支持,优化中间件适配层 |
| RMW 中间件抽象层 | rmw、rmw_implementation | 对 DDS 中间件的统一抽象封装,隔离上层应用与底层中间件 | 优化中间件动态加载逻辑,新增接口兼容性校验 |
| RCL 客户端库抽象层 | rcl、rcl_logging、rcl_yaml_param_parser | 实现 ROS2 核心概念的 C 语言抽象,包括节点、话题、服务、参数、日志等,是上层客户端库的基础 | 新增 rcl_logging_implementation 集成,实现日志后端动态加载;优化节点生命周期管理逻辑 |
| 客户端库层 | rclcpp(C++)、rclpy(Python) | 面向开发者的 ROS2 API 封装,实现节点、通信、参数、生命周期等核心功能的语言绑定 | 新增带参插件系统 API、生命周期节点 API 增强、C++20 标准适配 |
| 应用层 | 功能包、工具链、生态组件 | 机器人应用功能包、ros2 cli 工具、rviz2、gazebo、Nav2、MoveIt2 等生态组件 | 全面适配底层新特性,生命周期节点原生支持 |
核心源码学习路径:
- 从 rcl 源码入手,理解 ROS2 节点、话题、服务的底层实现,掌握 DDS 实体的创建与管理逻辑
- 深入 rclcpp 源码,理解 C++ API 的封装逻辑,掌握生命周期节点、executor 执行器、回调组的底层实现
- 学习 class_loader 源码,理解 C++ 动态库加载、插件实例化的底层原理,掌握带参构造函数的实现机制
- 研究 rcl_logging_implementation 源码,理解动态库加载、符号懒解析、函数转发的实现逻辑
2. 通信底层原理
核心精通内容:
- rosidl 代码生成机制:理解 ROS2 接口定义语言(IDL/msg/srv/action)的编译过程,掌握代码生成器的工作原理,能自定义代码生成模板,实现接口的定制化扩展
- 序列化与反序列化:掌握 ROS2 CDR 序列化标准,理解不同数据类型的序列化实现,能优化大流量数据的序列化性能,实现零拷贝传输
- DDS 核心原理:掌握 DDS 的域参与者、发布者、订阅者、主题、数据读取器、数据写入器核心实体,理解 DDS 自动发现机制、数据分发原理、QoS 策略的底层实现
- ROS2 与 DDS 的映射关系:掌握 ROS2 节点、话题、服务、动作与 DDS 实体的映射规则,能通过自定义 DDS 配置文件优化 ROS2 通信性能
3. 实时性原理与工业级优化
工业机器人、协作机器人、无人车等场景对实时性有严苛要求,精通 ROS2 实时性优化是工业级开发的核心能力:核心精通内容:
- Linux 实时内核原理:掌握 PREEMPT_RT 实时补丁的实现原理,理解内核抢占、中断线程化、优先级继承机制,能在 Lubuntu 26.04 上完成实时内核的定制化编译与配置
- ROS2 实时性配置:掌握线程优先级调度、内存锁定、CPU 亲和性配置,实现 ROS2 节点的硬实时调度,控制线程抖动 < 100us
- 实时通信优化:掌握 DDS 实时传输配置、零拷贝传输、共享内存通信,实现控制指令的低延迟、高可靠传输,端到端延迟 < 1ms
- 实时安全控制:掌握硬实时系统的安全设计,实现紧急停止、故障安全处理,保障工业机器人的功能安全
二、ROS2 工程化与工业级部署
1. 代码工程化与规范化开发
核心精通内容:
- ROS2 包开发规范:严格遵循 ROS 2 官方开发规范,实现代码的模块化、可复用、可测试,包括目录结构规范、命名规范、接口设计规范、注释规范
- 单元测试与集成测试:基于 gtest(C++)、pytest(Python)实现 ROS2 节点的单元测试,覆盖核心功能、边界条件、异常场景;基于 launch_test 实现多节点集成测试,保障系统功能的稳定性
- CI/CD 持续集成:基于 GitHub Actions、GitLab CI 搭建 ROS2 项目的自动化流水线,实现代码提交后的自动编译、测试、代码格式检查、静态分析、打包发布
- 代码质量管控:通过 clang-format、cpplint 实现代码格式统一,通过 clang-tidy、cppcheck 实现代码静态分析,提前发现内存泄漏、空指针、未定义行为等潜在问题
2. 极致性能优化
针对 Lubuntu 低资源边缘设备与工业级场景,实现 ROS2 系统的极致性能优化:核心优化方向:
- CPU 占用优化:优化 executor 执行器模型,合理配置回调组与线程模型,减少线程上下文切换;优化高频回调函数的执行效率,减少循环内的冗余操作;通过 CPU 亲和性绑定,将关键线程绑定到指定 CPU 核心
- 内存占用优化:优化大流量数据的内存管理,使用对象池、内存池减少内存分配与释放;避免不必要的数据拷贝,实现零拷贝传输;针对嵌入式设备裁剪 ROS2 功能包,移除不必要的组件
- 传输延迟优化:优化 QoS 配置,减少数据排队延迟;启用 DDS 共享内存通信,减少本机节点间的传输延迟;优化序列化与反序列化逻辑,减少大流量数据的处理耗时
- 启动速度优化:优化节点启动逻辑,实现懒加载与按需初始化;通过组件化与动态加载,减少系统启动时间;针对工控机实现快速开机启动,系统上电到机器人节点就绪时间 < 10s
3. 工业级系统部署与运维
核心精通内容:
- 容器化部署:基于 Docker 实现 ROS2 系统的容器化打包,实现开发环境与生产环境的一致性;通过 Docker Compose 实现多容器、多节点的编排与管理,支持一键部署与版本回滚
- 集群化部署:针对多机器人集群场景,基于 Kubernetes 实现机器人节点的集群化部署、弹性伸缩、故障自愈,适配工厂、园区级多机器人系统
- 系统服务管理:基于 systemd 实现 ROS2 节点的系统服务化,支持开机自启、故障自动重启、日志管理、运行状态监控,适配工业机器人 7×24 小时运行需求
- 远程监控与运维:实现机器人系统的远程状态监控、日志采集、参数配置、程序升级,支持多机器人集群的统一运维管理;对接工业 SCADA 系统、数字孪生平台,实现机器人系统的可视化监控
4. 安全合规与信息安全
工业机器人场景对安全合规有严格要求,ROS2 L 版本提供了完善的安全支持:核心精通内容:
- SROS2 安全通信:掌握 SROS2 的使用与配置,实现节点身份认证、话题 / 服务的访问控制、数据传输加密,防止非法节点接入与数据篡改
- 功能安全:遵循 ISO 13849 工业机器人功能安全标准,实现机器人控制系统的安全架构设计,包括安全急停、安全速度限制、碰撞检测、故障安全处理
- 数据安全:实现机器人传感器数据、运行日志、用户数据的安全存储与加密传输,符合工业数据安全合规要求
- 漏洞防护:定期进行安全漏洞扫描与修复,关闭不必要的网络端口与服务,实现机器人系统的入侵检测与防护
三、ROS2 二次开发与定制化扩展
基于 ROS2 Lyrical Luth 的开放架构,实现核心功能的定制化扩展,解决垂直场景的特殊需求,是精通 ROS2 的核心标志。
1. 自定义 RMW 中间件开发
基于 ROS2 RMW 接口规范,开发自定义通信中间件,适配特殊场景的通信需求:
- 工业现场总线适配:开发基于 EtherCAT、Profinet 等工业总线的 RMW 中间件,实现 ROS2 与工业控制系统的无缝集成
- 专用通信协议适配:开发基于 5G、LoRa、卫星通信的 RMW 中间件,适配广域网、低带宽、高延迟的特殊通信场景
- 定制化安全通信:开发符合国密标准的加密通信中间件,满足工业、军工场景的高安全需求
2. 自定义日志后端开发
基于 ROS2 L 版本新增的rcl_logging_implementation框架,开发自定义日志后端,实现日志系统的定制化扩展:
- 工业日志平台对接:开发对接工业 SCADA 系统、MES 系统的日志后端,实现机器人日志与生产系统的融合
- 云边端日志协同:开发对接阿里云、腾讯云等云平台日志服务的后端,实现多机器人集群的日志云端集中管理与智能分析
- 高可靠日志存储:开发基于工业级存储的日志后端,实现日志的掉电保护、循环存储、异常日志加密存储
3. 自定义插件框架开发
基于 ROS2 L 版本升级后的 class_loader 与 pluginlib,开发机器人专用插件框架,实现算法的模块化、热插拔、动态加载:
- 机器人算法插件框架:开发面向移动机器人导航、机械臂运动规划、视觉感知算法的通用插件框架,支持算法的动态替换、运行时加载、参数统一管理
- 工业机器人工艺包框架:开发面向焊接、打磨、分拣、装配等工业工艺的插件框架,实现工艺算法的标准化封装与复用
- 传感器驱动插件框架:开发面向工业相机、激光雷达、力传感器等传感器的通用驱动插件框架,支持不同品牌传感器的无缝适配
4. 工业级硬件驱动开发
基于 ROS2 的hardware_interface接口与生命周期节点特性,开发工业级硬件的实时驱动,实现机器人硬件的标准化控制与状态管理:
- 工业机械臂驱动开发:基于 ROS2 Control 框架,开发 6 轴 / 7 轴协作机械臂的实时驱动,实现关节控制、状态反馈、安全控制
- 移动机器人底盘驱动开发:开发差分驱动、全向移动、阿克曼转向底盘的实时驱动,实现高精度速度控制、里程计计算、故障诊断
- 工业传感器驱动开发:开发 3D 相机、力扭矩传感器、激光雷达、安全扫描仪等工业传感器的驱动,实现高频率、低延迟的数据采集与生命周期管理
四、科研创新与前沿应用落地
针对机器人工程专业的科研、毕业设计、顶级竞赛(RoboMaster、RoboCup、ICRA 机器人挑战赛),实现前沿算法的 ROS2 工程化落地,是从技术开发到科研创新的核心跨越。
1. 前沿算法的 ROS2 工程化
核心方向与落地方法:
- 深度学习感知算法工程化:将目标检测、实例分割、6D 位姿估计、语义分割等前沿视觉算法封装为 ROS2 节点,基于 pluginlib 实现算法模型的插件化热插拔,支持模型的运行时切换与参数动态调整,适配工业视觉、自动驾驶场景
- 强化学习机器人控制算法落地:将深度强化学习的路径规划、运动控制、抓取策略算法封装为 ROS2 功能包,基于 ROS2 动作机制实现算法与机器人硬件的交互,实现仿真到真实机器人的迁移(Sim2Real)
- 多机器人协同算法开发:将多机器人协同 SLAM、协同导航、协同作业算法基于 ROS2 实现,利用 Zenoh 中间件实现广域网多机通信,完成多机器人集群的分布式协同控制
- 大模型机器人交互系统:将大语言模型、多模态大模型与 ROS2 集成,实现机器人的自然语言交互、任务规划、自主决策,开发通用机器人智能体系统
2. 垂直场景定制化系统开发
针对不同垂直领域的机器人场景,基于 ROS2 L 版本开发定制化系统,解决行业实际问题:
- 工业移动操作机器人:开发融合自主导航、运动规划、3D 视觉、人机交互的工业移动操作机器人系统,实现工厂场景的物料搬运、自动化上下料、装配作业
- 自动驾驶无人车:基于 ROS2 开发低速自动驾驶系统,实现环境感知、路径规划、行为决策、车辆控制全流程功能,适配园区、厂区、景区等封闭场景
- 医疗康复机器人:基于 ROS2 开发康复机器人控制系统,实现高精度力控制、运动轨迹规划、康复训练流程管理,符合医疗设备的安全合规要求
- 协作机器人系统:开发人机协作机器人系统,实现拖拽示教、碰撞检测、柔顺控制、视觉引导抓取,适配 3C 电子、汽车零部件等工业场景
3. 开源社区贡献
参与 ROS2 官方开源社区开发,是提升个人工程能力、建立行业影响力的核心途径:
- 针对 ROS2 Lyrical Luth 版本,提交 bug 修复、性能优化 PR,解决社区已知问题
- 开发通用 ROS2 功能包,贡献到 ROS2 社区生态,解决行业通用痛点
- 参与 ROS2 官方文档、教程的编写与翻译,推动 ROS2 在国内的普及
- 参与 ROS2 标准化工作,推动 ROS2 在工业机器人领域的标准化应用
五、精通级工业级综合项目(全栈开发)
项目名称:工业级移动操作机器人全栈开发项目背景:面向工厂柔性生产场景,开发集自主移动、视觉感知、运动规划、人机交互于一体的移动操作机器人系统,完成物料搬运、自动化上下料、装配作业等工业任务,完全基于 Lubuntu 26.04 + ROS2 Lyrical Luth 开发,满足工业级 7×24 小时稳定运行要求。
核心开发内容:
- 硬件系统设计与适配:完成移动底盘 + 6 轴协作机械臂的硬件集成,适配激光雷达、3D 工业相机、力扭矩传感器、安全扫描仪等硬件,在 Lubuntu 26.04 工控机上完成硬件驱动适配
- 实时驱动系统开发:基于 ROS2 Control 框架与生命周期节点,开发移动底盘、机械臂、传感器的实时驱动,实现标准化状态管理、故障诊断、安全急停控制,满足硬实时要求
- SLAM 与自主导航系统:基于 SLAM Toolbox 完成工厂环境的高精度建图,基于 Nav2 框架开发自主导航系统,实现动态避障、多点巡航、自动充电功能,适配工厂复杂动态环境
- 运动规划与视觉抓取系统:基于 MoveIt2 开发机械臂运动规划系统,结合 3D 视觉实现目标物体的检测、定位与 6D 位姿估计,完成自动化抓取与放置,支持柔性装配作业
- 系统工程化与性能优化:完成代码的模块化开发、单元测试与集成测试,搭建 CI/CD 自动化流水线;针对 Lubuntu 工控机完成 CPU、内存、延迟的极致优化,保障系统稳定运行
- 工业级部署与安全合规:基于 Docker 实现系统容器化部署,通过 systemd 实现开机自启与故障自愈;基于 SROS2 实现安全通信,遵循 ISO 13849 标准完成安全功能设计,满足工业现场合规要求
- 人机交互系统开发:开发工业级人机交互界面,实现机器人状态监控、任务下发、参数配置、故障报警功能,支持示教器、平板、PC 多端访问
机器人工程专业全周期学习时间规划(本科 4 年)
表格
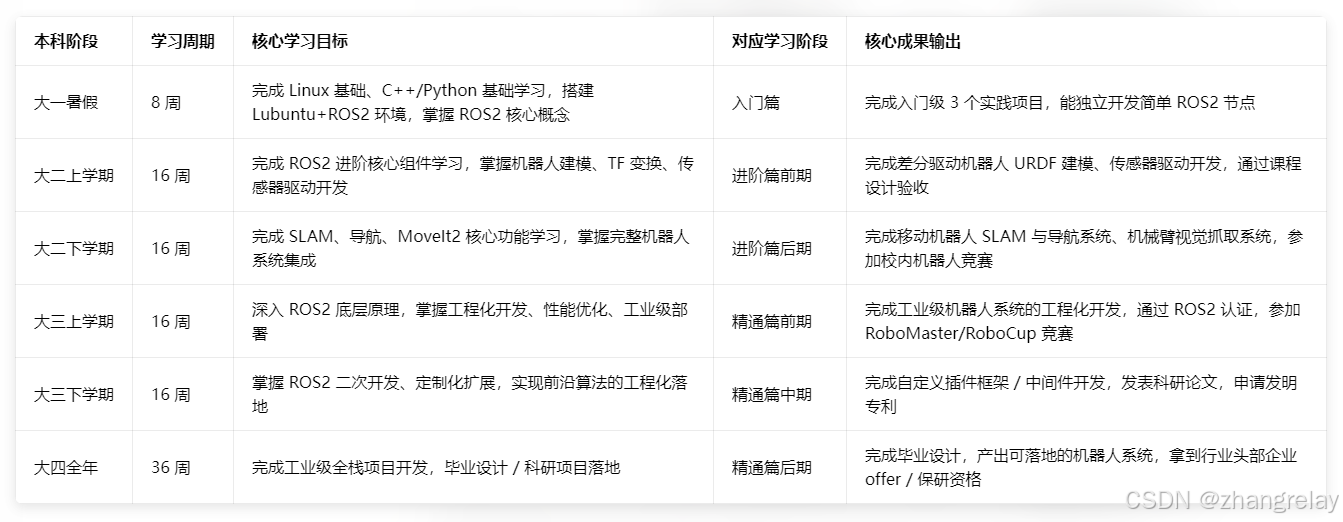
| 本科阶段 | 学习周期 | 核心学习目标 | 对应学习阶段 | 核心成果输出 |
|---|---|---|---|---|
| 大一暑假 | 8 周 | 完成 Linux 基础、C++/Python 基础学习,搭建 Lubuntu+ROS2 环境,掌握 ROS2 核心概念 | 入门篇 | 完成入门级 3 个实践项目,能独立开发简单 ROS2 节点 |
| 大二上学期 | 16 周 | 完成 ROS2 进阶核心组件学习,掌握机器人建模、TF 变换、传感器驱动开发 | 进阶篇前期 | 完成差分驱动机器人 URDF 建模、传感器驱动开发,通过课程设计验收 |
| 大二下学期 | 16 周 | 完成 SLAM、导航、MoveIt2 核心功能学习,掌握完整机器人系统集成 | 进阶篇后期 | 完成移动机器人 SLAM 与导航系统、机械臂视觉抓取系统,参加校内机器人竞赛 |
| 大三上学期 | 16 周 | 深入 ROS2 底层原理,掌握工程化开发、性能优化、工业级部署 | 精通篇前期 | 完成工业级机器人系统的工程化开发,通过 ROS2 认证,参加 RoboMaster/RoboCup 竞赛 |
| 大三下学期 | 16 周 | 掌握 ROS2 二次开发、定制化扩展,实现前沿算法的工程化落地 | 精通篇中期 | 完成自定义插件框架 / 中间件开发,发表科研论文,申请发明专利 |
| 大四全年 | 36 周 | 完成工业级全栈项目开发,毕业设计 / 科研项目落地 | 精通篇后期 | 完成毕业设计,产出可落地的机器人系统,拿到行业头部企业 offer / 保研资格 |
高频问题排查手册(Lubuntu 26.04 + ROS2 Lyrical Luth)
1. 环境搭建类
- 问题:ROS2 软件源添加失败,提示密钥验证错误解决:重新下载官方 GPG 密钥,确保密钥文件路径正确,系统时间同步正常
- 问题:apt 安装 ROS2 失败,提示软件包不存在解决:确认 Ubuntu 系统版本为 26.04,Lubuntu 完全兼容;检查软件源配置是否正确,执行
sudo apt update更新软件源缓存 - 问题:源码编译失败,提示内存不足解决:增大 SWAP 交换分区,编译时添加
--parallel-workers 1限制编译线程数,关闭其他占用内存的程序
2. 编译开发类
- 问题:colcon 编译提示找不到功能包解决:确认功能包的 package.xml 中声明了正确的依赖,工作空间已 source,依赖包已通过 rosdep 安装
- 问题:带参插件编译失败,模板推导错误解决:确认
InterfaceTraits模板的特化签名与插件构造函数完全一致,参数类型、数量完全匹配;MSVC 编译器需升级到最新版本,修复模板推导 bug - 问题:自定义接口编译后,代码中找不到头文件解决:确认 CMakeLists.txt 中正确添加了接口文件的编译规则,头文件安装路径正确,功能包已编译并 source 环境
3. 运行时类
- 问题:节点运行提示
Could not load library插件加载失败解决:确认插件描述 XML 文件路径正确,package.xml 中声明了插件导出规则,插件库已编译生成,无链接错误 - 问题:多节点运行时,话题通信无数据解决:确认 ROS_DOMAIN_ID 环境变量完全一致,节点话题名称、消息类型完全匹配,关闭系统防火墙,DDS 多播功能正常
- 问题:生命周期节点无法切换状态解决:检查状态回调函数的返回值,配置 / 激活阶段出现错误会导致状态切换失败;查看节点日志,定位错误原因,完善异常处理逻辑
4. 可视化类
- 问题:rviz2 启动黑屏、闪退解决:Lubuntu 默认 X11 环境无 Wayland 兼容性问题,确认显卡驱动安装正常,3D 加速功能开启,执行
glxinfo | grep rendering验证 3D 加速正常 - 问题:rviz2 中无法显示机器人模型,提示 TF 变换缺失解决:确认 robot_state_publisher 节点正常运行,joint_state_publisher 发布了关节状态,TF 树中存在完整的坐标变换链路
- 问题:gazebo 仿真启动卡顿,模型加载失败解决:降低仿真场景的复杂度,关闭不必要的传感器插件;更换国内模型源,提前下载模型文件到本地缓存
机器人工程专业专属学习资源推荐
官方文档
- ROS2 Lyrical Luth 官方文档:https://docs.ros.org/en/lyrical/
- ROS2 设计文档:https://design.ros2.org/
- ROS2 工业级应用指南:https://industrial-training-master.readthedocs.io/
经典书籍
- 《ROS2 机器人编程实战》:入门级经典,覆盖 ROS2 核心概念与基础开发
- 《ROS2 for Beginners》:零基础入门,配套大量实战案例
- 《机器人操作系统 ROS2 编程与应用》:贴合机器人工程专业教学,覆盖 SLAM、导航、MoveIt2
- 《Mastering ROS2》:精通级书籍,深入 ROS2 底层原理与工程化开发
- 《ROS2 机器人控制与人工智能》:覆盖前沿算法与 ROS2 工程化落地
在线课程
- ROS 2 官方培训课程:https://training.ros.org/
- 古月居 ROS2 入门到精通系列课程:贴合国内机器人工程专业教学
- Coursera《机器人学》专项课程:ROS2 实践与机器人学理论结合
- 腾讯课堂《ROS2 工业机器人开发实战》:工业级应用落地课程
开源项目与竞赛资源
- ROS2 官方示例项目:https://github.com/ros2/examples
- 移动机器人开源项目:TurtleBot3、HumbleBot、AGV Robot
- 机械臂开源项目:ROS2 Control Demo、MoveIt2 Tutorials、xArm ROS2
- 竞赛资源:RoboMaster 官方 ROS2 开源项目、RoboCup 开源项目、ICRA 机器人挑战赛开源方案
社区资源
- ROS2 官方论坛:https://discourse.ros.org/
ROS 2 Lyrical Luth (L 版本) 完整中文详解文档
Lyrical Luth(代号 lyrical)是 ROS 2 的第十二个官方正式发行版,于 2026 年 5 月 22 日发布通用可用(General Availability)版本,遵循 ROS 2 每年 5 月 23 日(世界海龟日)发布新版本的惯例,提供长达 5 年的官方维护周期,生命周期至 2031 年 5 月终止。
本版本基于 ROS 2 Rolling Ridley 滚动开发版迭代而来,核心聚焦插件系统能力增强、生命周期节点生态完善、日志系统灵活性提升、语言标准升级与 API 规范化四大方向,在保证全量向后兼容的前提下,解决了社区长期反馈的核心痛点,同时优化了多平台支持能力,为机器人开发提供了更稳定、灵活、高效的开发框架。
目录
-
发布时间线
File
-
支持平台
File
-
最低语言版本要求
File
-
依赖项要求
File
-
中间件实现支持
File
-
安装说明
File
-
版本核心新特性详解
File
-
版本生命周期与维护规范
File
发布时间线
本版本的核心里程碑节点如下,其中部分节点因开发进度需求进行了延期调整,每个里程碑的核心工作与对开发者的影响详细说明如下:
表格
| 时间节点 | 里程碑名称 | 核心工作内容 | 对开发者的影响 |
|---|---|---|---|
| 前置阶段 | Rolling 向 Lyrical 目标平台迁移 | 1. RHEL 10 + Ubuntu 26.04:核心包在两个平台编译成功后立即启动迁移2. Windows 11:全量构建全绿后启动迁移 | 完成目标平台的基础适配,是后续所有开发测试的前提,优先保障 Tier1 级别平台的兼容性 |
| 2026 年 4 月 13 日(周一) | Alpha 版本 + RMW 中间件冻结(原计划 4 月 6 日,延期 1 周) | 1. 完成 ROS Base 基础包的初步测试验证2. 对所有 RMW 中间件提供方包执行API 与功能冻结,冻结后仅可接受 bug 修复提交,禁止新增特性或破坏性变更 | 中间件厂商与基于 RMW 二次开发的开发者需在此节点前完成核心功能开发,后续仅可修复问题 |
| 2026 年 4 月 20 日(周一) | ROS Base 包冻结(原计划 4 月 13 日,延期 1 周) | 1. 对 Rolling Ridley 中的 ROS Base 基础包执行API 与功能冻结2. 冻结后仅可提交 bug 修复,可新增非基础包 | 基于 ROS Base 核心库开发的开发者需在此节点前完成功能开发,后续 API 不再变更 |
| 2026 年 4 月 21 日(周二) | 发行版分支创建(原计划 4 月 20 日,延期 1 天) | 1. 从 Rolling Ridley 分支创建 Lyrical 专属分支2. rosdistro 仓库重新开放 Rolling 版本的 Base 包 PR 提交3. Lyrical 版本的开发主体从 ros-rolling-* 切换至 ros-lyrical-* 软件包 | 开发者需针对 Lyrical 分支进行适配开发,Rolling 版本恢复新特性迭代 |
| 2026 年 4 月 27 日(周一) | Beta 版本发布 | 1. 发布 ROS Desktop 全量包的更新版本2. 启动全社区通用测试号召 | 社区开发者可安装 Beta 版本进行功能测试与兼容性验证,反馈问题 |
| 2026 年 4 月 30 日(周四) | 官方教程社区测试启动 | 开放 ROS 2 官方教程的全量社区测试,验证教程在 Lyrical 版本中的可用性 | 社区用户可参与教程测试,反馈文档与功能的适配问题 |
| 2026 年 5 月 11 日(周一) | 发布候选版(RC)构建 | 完成 ROS Desktop 全量包的发布候选版本构建,进入最终验证阶段 | 最终功能冻结,仅接受阻塞性 bug 的修复提交,无特殊情况不再修改代码 |
| 2026 年 5 月 18 日(周一) | 发行版全量冻结 | 1. 冻结所有 ROS 桌面级软件包的 Lyrical 分支2. 禁止合并任何针对 Lyrical 分支、rosdistro 仓库中 lyrical/distribution.yaml 的 PR | 进入最终发布前的锁版阶段,无阻塞性问题不再修改任何代码 |
| 2026 年 5 月 22 日(周五) | 通用可用版本(GA)正式发布 | 1. 发布官方版本公告2. 解除 ROS 桌面包的源码冻结,重新开放 Lyrical 分支的 PR 提交 | 版本正式发布,用户可正式安装使用,官方开启常规维护流程 |
版本开发进度可参考官方项目看板
File
,版本发布流程可参考ROS 2 官方发布规范
File
。
支持平台
ROS 2 按照支持力度将平台分为 3 个等级,本章节先明确等级定义,再给出 Lyrical 版本的详细平台支持矩阵。
平台支持等级定义
表格
| 支持等级 | 官方保障能力 |
|---|---|
| Tier 1 | 最高支持等级。官方执行全量自动化测试,核心包必须 100% 编译通过、测试用例全量通过;提供官方预编译安装包;优先响应该平台的 bug 修复与安全更新 |
| Tier 2 | 中等支持等级。官方执行核心包的自动化构建与基础测试,提供部分预编译包;不保证所有功能全量测试通过;bug 修复优先级低于 Tier1 |
| Tier 3 | 社区支持等级。官方不提供自动化测试与预编译包,不做官方维护;仅接受社区提交的兼容修复代码;用户需自行从源码编译使用 |
详细平台支持矩阵
表格
| 架构 | Ubuntu Resolute (26.04) | Ubuntu Noble (24.04)* | Windows 11 (VS2022) | RHEL 10* | macOS | Debian Trixie (13)* | OpenEmbedded / Yocto Project |
|---|---|---|---|---|---|---|---|
| amd64 | Tier 1 [d][a] | Tier 3 | Tier 1 [a] | Tier 2 [d][a] | Tier 3 | Tier 3 | Tier 3 |
| arm64 | Tier 1 [d][a] | Tier 3 | Tier 3 | Tier 3 | Tier 3 | Tier 3 | Tier 3 |
| arm32 | Tier 3 | Tier 3 | Tier 3 | Tier 3 | Tier 3 | Tier 3 | Tier 3 |
补充说明
- 早期 EOL 平台标注*:标注 * 的平台遵循 ROS 2 平台 EOL 政策执行早期终止支持,各平台的支持周期如下:
- Ubuntu Noble (24.04):官方支持至 2029 年 06 月 01 日
- RHEL 10:官方支持至 2030 年 05 月 31 日
- Debian Trixie (13):官方支持至 2028 年 08 月 09 日
- 安装方式标注:
- [d]:可通过发行版专属软件包(Debian、RPM 等)直接安装,是官方推荐的最简安装方式
- [a]:可通过下载包含 ROS Lyrical 全量 ros2.repos 文件内包的预编译归档包进行安装
- 通用规则:所有 Tier 3 平台,官方不提供任何预编译安装包与自动化测试保障,用户若需使用,必须通过源码自行编译构建。
最低语言版本要求
本版本全面提升了开发语言的标准基线,对编译与运行环境的语言版本做出了明确约束,具体要求如下:
-
C++:最低要求 C++20 标准
- ROS 2 核心库与官方包已全面迁移至 C++20 标准开发编译,相较于此前版本的 C++17 基线,新增对概念(Concepts)、协程、模块、范围(Ranges)等 C++20 核心特性的支持。
- 开发者需使用支持 C++20 标准的编译器,例如 GCC 11+、Clang 14+、MSVC 2022 等,否则会出现编译失败问题。
-
C 语言:最低要求 C17 标准
- 底层 C 语言接口与依赖库统一基线至 C17 标准,保证跨平台编译的一致性,减少不同编译器对 C 标准扩展的兼容性问题。
-
Python:最低支持 Python 3.12,最高兼容 Python 3.14
- ROS 2 的 Python 工具链、客户端库 rclpy、代码生成工具 rosidl_python 等均基于 Python 3.12 + 开发,不再支持 Python 3.11 及更低版本。
- 开发者需确保运行环境安装了 Python 3.12~3.14 区间的版本,避免出现 API 不兼容、功能异常问题。
依赖项要求
本章节将在版本正式 GA 发布后,补充全平台核心系统依赖包的版本对照表,涵盖 CMake、Boost、Eigen、PCL、OpenCV 等机器人开发核心依赖的最低版本要求与各平台适配版本,开发者可持续关注 ROS 2 官方文档更新。
中间件实现支持
ROS 2 基于 DDS(数据分发服务)标准实现底层通信,RMW(ROS Middleware Interface)是 ROS 2 对底层 DDS 实现的抽象封装层,开发者可根据业务场景选择不同的 RMW 实现,无需修改上层业务代码。
核心说明
- 本版本的默认中间件为 rmw_fastrtps_cpp(基于 eProsima Fast-DDS 实现)。
- 中间件的实际支持等级受其所在平台的支持等级约束,例如:Tier1 级别的中间件在 Tier2 级别的平台上运行时,仅能获得 Tier2 级别的官方支持。
详细中间件支持矩阵
表格
| 中间件库名称 | 底层实现厂商 / 项目 | 支持等级 | 支持平台 | 支持架构 |
|---|---|---|---|---|
| rmw_fastrtps_cpp | eProsima Fast-DDS | Tier 1 | 全平台 | 全架构 |
| rmw_connextdds | RTI Connext DDS | Tier 1 | Ubuntu、Windows、macOS | 除 arm64 外的全架构 |
| rmw_cyclonedds_cpp | Eclipse Cyclone DDS | Tier 1 | 全平台 | 全架构 |
| rmw_zenoh_cpp | Eclipse Zenoh | Tier 1 | 全平台 | 全架构 |
| rmw_fastrtps_dynamic_cpp | eProsima Fast-DDS | Tier 2 | 全平台 | 全架构 |
| rmw_gurumdds_cpp | GurumNetworks GurumDDS | Tier 3 | Ubuntu、Windows | 除 arm32 外的全架构 |
各中间件适用场景说明
- rmw_fastrtps_cpp:ROS 2 默认中间件,轻量高性能、跨平台兼容性强,是通用机器人场景的官方首推方案。
- rmw_connextdds:工业级商用 DDS 实现,具备极高的可靠性与实时性,适用于对稳定性要求严苛的工业机器人、商用机器人场景。
- rmw_cyclonedds_cpp:主打低延迟、低资源占用,适合嵌入式、边缘计算场景的机器人开发。
- rmw_zenoh_cpp:本版本正式纳入 Tier1 支持,具备广域网通信、低带宽占用、云边端协同的优势,适用于分布式、跨地域的机器人集群场景。
- rmw_fastrtps_dynamic_cpp:支持运行时动态类型解析,无需提前编译 IDL 文件,适用于原型验证、动态化业务场景。
- rmw_gurumdds_cpp:社区维护的第三方 DDS 实现,仅提供基础兼容支持。
安装说明
本章节将在版本正式 GA 后补充全平台的详细安装步骤,以下为通用安装方式框架,供开发者提前参考:
1. 发行版预编译包安装(官方推荐)
仅适用于 Tier1/Tier2 支持的平台,是最简安装方式:
- Ubuntu 26.04:将通过 apt 软件源直接安装
ros-lyrical-desktop-full等元包,核心步骤包括配置 ROS 2 软件源、添加官方密钥、更新软件源、安装对应版本元包、配置环境变量。 - RHEL 10:将通过 RPM 包管理器进行安装。
- Windows 11:将提供预编译二进制安装包与 Chocolatey 安装方式。
2. 源码编译安装
适用于所有平台,尤其是 Tier3 平台,核心步骤如下:
- 安装对应平台的编译依赖工具链;
- 通过 vcs 工具拉取官方提供的 ros2.repos 全量代码;
- 使用 rosdep 工具解决软件包依赖;
- 通过 colcon 构建工具执行全源码编译;
- 配置环境变量,验证安装结果。
3. 容器化安装
官方将同步发布多架构 Docker 镜像,涵盖ros-lyrical-core、ros-lyrical-base、ros-lyrical-desktop等不同层级的镜像,支持 amd64 与 arm64 架构,用户可直接通过 Docker/Podman 拉取使用,快速搭建开发与运行环境。
版本核心新特性详解
本版本的核心新特性聚焦于底层核心库能力增强、生态组件完善、API 规范化三大方向,所有新特性均保证向后兼容,原有代码无需修改即可正常运行,开发者可按需启用新能力。
class_loader 插件加载器
class_loader 是 ROS 2 底层的核心插件加载库,是 pluginlib、nodelet 等上层插件系统的基础,负责 C++ 类的动态加载与实例化。
核心新特性
新增向插件类构造函数传递参数的能力,支持创建非默认构造的插件类,彻底消除了对initialize()初始化方法的强依赖。
技术实现细节
- 新增模板结构体
InterfaceTraits自定义扩展点- 开发者可通过特化该模板结构体,定义派生插件类所需的构造函数签名,指定入参的类型与数量,class_loader 会在编译期校验插件类的构造函数是否匹配该签名,保证类型安全。
- 完全向后兼容:若开发者未特化
InterfaceTraits,class_loader 会默认使用无参构造函数,原有代码无需任何修改即可正常运行,无破坏性变更。
- 全平台兼容性修复
- 修复了 Linux-rhel 平台的编译失败问题;针对 Windows 平台 MSVC 编译器的模板推导 bug,调整了实现逻辑,保证了全平台的编译与运行一致性,所有 CI 测试用例全量通过。
对开发者的价值
- 简化插件开发流程:开发者可直接在构造函数中完成插件的初始化逻辑,无需拆分构造与
initialize()两步,减少样板代码,降低开发复杂度。 - 提升代码安全性:避免了因忘记调用
initialize()导致的对象未初始化使用问题,构造函数的天然特性保证了对象实例化即完成初始化。 - 支持更灵活的插件设计:可通过构造函数传入节点句柄、配置参数、回调函数等复杂类型,适配更多业务场景。
相关 PR:ros/class_loader#223
File
pluginlib 插件开发库
pluginlib 是 ROS 2 中基于 class_loader 封装的高层级插件开发框架,广泛应用于导航、感知、控制等各个模块的插件化开发,是 ROS 2 最常用的插件开发工具。
核心新特性
同步新增向插件构造函数传递参数的能力,完全对接 class_loader 新增的构造函数传参特性,上层开发者可直接使用,无需关注底层实现细节。
关键说明
- 完全兼容原有公共 API:社区验证确认,仅调用 pluginlib 公共 API 的原有代码无需任何修改,完全兼容;Nav2 等框架的编译问题是因其依赖了 pluginlib 的私有实现,不属于破坏性变更。
- 全平台验证通过:Linux、Windows、macOS 等全平台 CI 测试全量通过,保证了跨平台兼容性。
对开发者的价值
所有基于 pluginlib 开发的插件,均可直接升级使用带参构造函数,无需再设计initialize()方法,与 ROS 2 的节点、参数系统等集成更便捷,同时无任何迁移成本。
相关 PR:ros/pluginlib#291
File
image_transport 图像传输库
image_transport 是 ROS 2 中负责图像话题传输的核心库,提供图像的压缩、编码、解码能力,支持多种图像传输插件,是机器人视觉感知开发的基础组件。
核心新特性
全面支持生命周期节点(LifecycleNode),基于rclcpp::NodeInterfaces实现了节点接口的抽象,同时兼容普通节点与生命周期节点。
技术实现细节
- 基于标准 NodeInterfaces 的重构抽象出图像传输所需的核心节点接口(NodeBaseInterface、NodeParametersInterface、NodeLoggingInterface、NodeTimersInterface、NodeTopicsInterface 等),不再强依赖完整的
rclcpp::Node对象,无论是普通节点还是生命周期节点,只要提供了对应的 NodeInterfaces,即可被 image_transport 使用。 - 双 API 兼容设计保留了原有基于
rclcpp::Node指针的 API,同时新增了基于 NodeInterfaces 的 API,保证原有代码的向后兼容,开发者可平滑迁移。 - 生态全适配同步对
image_transport_plugins官方插件库进行了适配,包括 compressed 等常用插件,同时第三方插件维护者已承诺同步适配,保证生态完整性。 - 核心问题修复解决了 message_filters 库的兼容性问题、生命周期节点下 QoS 参数覆写失败问题,保证了功能的完整性。
对开发者的价值
- 彻底解决了生命周期节点中使用图像传输的痛点,无需再编写适配代码或使用 “生命周期节点内嵌普通节点” 的 hack 方案,可直接在生命周期节点中创建图像发布者、订阅者。
- 符合 ROS 2 的节点生命周期管理规范,可实现图像传输节点的状态管理(配置、激活、去激活、关闭等),提升了机器人视觉系统的鲁棒性,适合工业级、生产级应用。
相关 PR:ros-perception/image_common#352
File
point_cloud_transport 点云传输库
point_cloud_transport 是 ROS 2 中负责点云话题传输的核心库,对标 image_transport,提供点云的压缩、编码、解码能力,支持 draco 等点云压缩插件,是机器人 3D 感知、SLAM、导航开发的核心组件。
核心新特性
全面支持生命周期节点(LifecycleNode),完成了基于rclcpp::NodeInterfaces的重构,兼容普通节点与生命周期节点,与 image_transport 的设计保持统一。
技术实现细节
- 标准接口对齐摒弃了自定义 NodeInterfaces 的方案,采用 ROS 2 官方标准的
rclcpp::node_interfaces::NodeInterfaces接口,与 image_transport 实现方案一致,降低了开发者的学习成本。 - 平滑迁移设计保留了原有基于
rclcpp::Node的 API,并对旧 API 添加了[[deprecated]]弃用标记,引导开发者逐步迁移至新 API,同时保证了向后兼容。 - 插件生态适配同步对
point_cloud_transport_plugins官方插件库进行了适配,修复了插件实现中的接口不匹配、变量名错误等问题,保证 raw、draco 等常用插件在生命周期节点下正常运行。 - 全平台验证修复了 Windows 平台的符号链接错误、编译失败问题,全平台编译全量通过,所有单元测试与实机测试均验证通过。
对开发者的价值
实现了生命周期节点中点云传输的原生支持,开发者可直接在生命周期节点中创建点云发布者、订阅者,适配 3D 感知、SLAM 等场景的生命周期管理需求,同时可复用 image_transport 的使用经验,学习成本极低。
相关 PR:ros-perception/point_cloud_transport#109
File
rcl_logging_implementation 日志动态加载库
本版本新增的核心软件包,彻底重构了 ROS 2 日志系统的底层实现,解决了社区长期以来日志后端切换不灵活的痛点。
核心新特性
实现日志后端的运行时动态加载,用户无需重新编译 rcl 核心库,仅通过环境变量即可在运行时切换日志后端实现,同时支持用户自定义日志后端的无缝接入。
技术实现细节
- 解耦设计参考
rmw_implementation的设计模式,实现了日志接口与实现的完全解耦。rcl 库不再直接依赖具体的日志后端,而是依赖rcl_logging_implementation抽象层,由该层负责运行时动态加载用户指定的日志后端共享库。 - 动态加载机制基于
rcpputils::SharedLibrary实现共享库加载,完成日志接口符号的懒加载与运行时解析,支持任意符合 rcl_logging 接口规范的日志后端。 - 极简的切换方式用户可通过设置
RCL_LOGGING_IMPLEMENTATION环境变量指定日志后端,无需修改代码、无需重新编译:- 不设置该变量:默认使用
rcl_logging_spdlog后端,与原有行为完全一致,无破坏性变更; export RCL_LOGGING_IMPLEMENTATION=rcl_logging_noop:切换至无操作后端,关闭日志文件写入,仅保留标准输出日志;- 可指定自定义日志后端库名,实现定制化日志系统的接入。
- 不设置该变量:默认使用
- 完善的错误处理若用户指定的日志后端不存在、无法加载,程序会抛出明确的错误信息,提示加载失败的原因,便于开发者排查问题。
核心使用场景与价值
- 灵活切换日志模式:开发调试时使用 spdlog 后端保留完整日志,生产部署时使用 noop 后端减少磁盘 IO,运维场景下切换至 syslog 后端对接日志采集系统,无需重新部署程序。
- 降低使用成本:彻底解决了此前切换日志后端必须重编译 rcl 库的痛点,仅需安装对应后端包、设置环境变量即可完成切换。
- 开放自定义能力:用户无需修改 ROS 2 核心源码,仅需实现标准接口即可接入自定义日志后端,便于企业对接自身的日志平台。
官方验证示例
bash
运行
# 默认使用spdlog后端,生成日志文件
ros2 run demo_nodes_cpp talker
# 切换至noop后端,不生成日志文件,仅保留stdout输出
export RCL_LOGGING_IMPLEMENTATION=rcl_logging_noop
ros2 run demo_nodes_cpp talker
# 指定不存在的后端,程序抛出明确错误
export RCL_LOGGING_IMPLEMENTATION=rcl_logging_noexist
ros2 run demo_nodes_cpp talker
相关链接:
- 需求 issue:
ros2/rcl#1178
File
- rcl 适配 PR:
ros2/rcl#1276
File
- 核心包实现 PR:
ros2/rcl_logging#135
File
rosidl_python Python 接口代码生成器
rosidl_python 是 ROS 2 中负责根据 IDL/msg/srv 文件生成 Python 语言接口的核心工具,是 rclpy 客户端库的核心组件。
核心变更
弃用向数组 / 序列字段传入 Python set 集合对象的用法,该特性将在 ROS M 版本中彻底移除;推荐使用实现了collections.abc.Sequence接口的类型,最常用的包括 list 列表、tuple 元组、numpy.ndarray 数组。
变更背景
此前的版本允许向消息的数组 / 序列字段传入 set 集合,但 set 集合是无序的,而 ROS 2 的数组 / 序列字段是强有序的,传入 set 会导致不可预期的顺序问题,引发消息序列化错误、数据传输异常等隐性 bug,且问题难以排查。为规范 API 使用,官方决定对该用法进行弃用。
迁移指引
-
弃用警告:Lyrical 版本中传入 set 对象会触发明确的弃用警告,但不会影响程序运行,为开发者预留了充足的迁移时间。
-
推荐替代方案:
- 通用场景:使用 list 列表或 tuple 元组,符合 Python 常规使用习惯,完全匹配 ROS 2 数组字段的有序语义;
- 数值计算场景:直接传入 numpy.ndarray 数组,rosidl_python 原生支持,无需额外转换,适合感知、算法开发场景。
-
代码示例错误用法(将被弃用):
python
运行
from std_msgs.msg import Int32MultiArray msg = Int32MultiArray() msg.data = {1, 2, 3, 4} # 传入set集合,将触发弃用警告正确用法:
python
运行
from std_msgs.msg import Int32MultiArray import numpy as np msg = Int32MultiArray() # 方案1:使用list列表 msg.data = [1, 2, 3, 4] # 方案2:使用tuple元组 msg.data = (1, 2, 3, 4) # 方案3:使用numpy数组 msg.data = np.array([1, 2, 3, 4], dtype=np.int32)
版本生命周期与维护规范
表格
| 版本信息 | 详情 |
|---|---|
| 版本全称 | Lyrical Luth |
| 版本代号 | lyrical |
| 发布时间 | 2026 年 5 月 |
| 正式 GA 时间 | 2026 年 5 月 22 日 |
| 终止维护(EOL)时间 | 2031 年 5 月 |
| 维护周期 | 5 年 |
ROS 2 遵循每年 5 月 23 日(世界海龟日)发布一个新发行版的惯例,每个长期支持版本均提供 5 年的官方维护,包括 bug 修复、安全漏洞更新、关键问题适配等,为企业级用户提供长期稳定的技术保障。
版本总结
ROS 2 Lyrical Luth 版本是一次以开发者体验优化、生态能力完善为核心的迭代,没有破坏性的核心 API 变更,保证了从旧版本平滑迁移的体验。同时,新增的构造函数传参、生命周期节点生态支持、日志动态加载等特性,解决了社区长期以来的核心痛点,进一步完善了 ROS 2 的插件化、组件化能力,提升了框架的灵活性与鲁棒性,既适合快速原型开发,也满足工业级生产部署的严苛要求。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 12
12 0
0- 0



 已为社区贡献142条内容
已为社区贡献142条内容

所有评论(0)