发那科机器人与小原焊机通讯
发那科机器人做主站(Profinet通讯),与小原焊机通讯组态
一.准备工作:配网软件PFN-CT,网线,笔记本电脑。
二.发那科机器人做主站,网口要插3和4。
三.操作步骤:
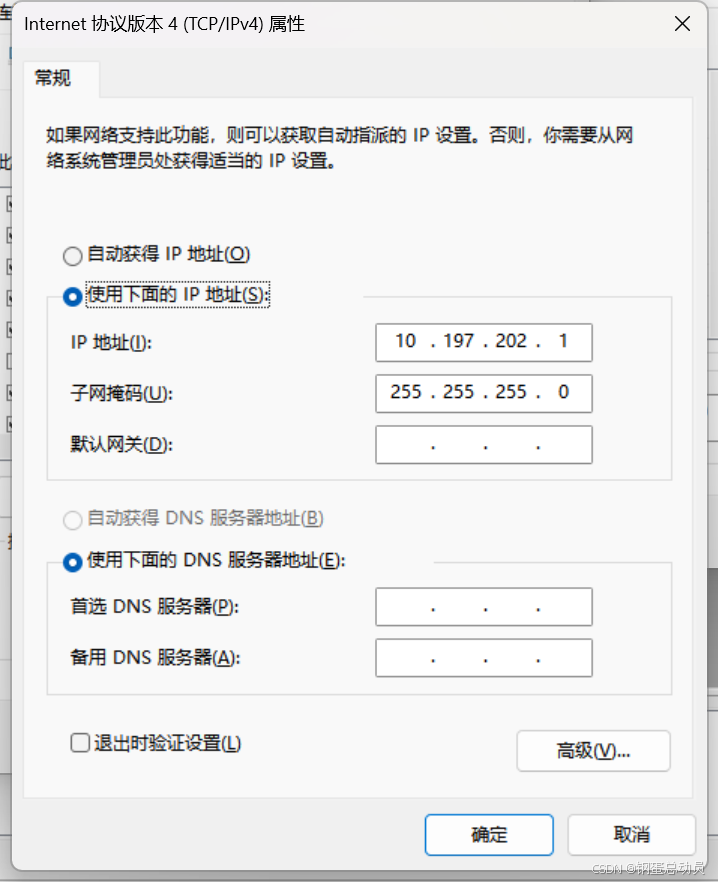
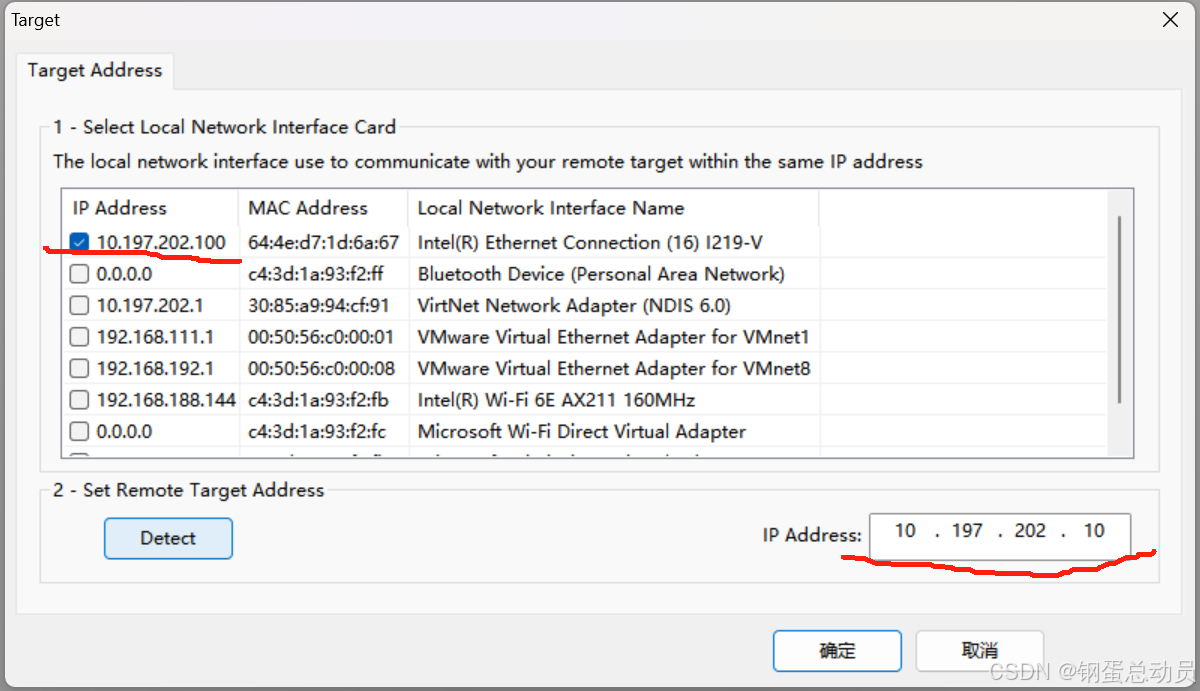
1.机器人侧的IP地址(示教器上设置IP地址)和电脑的IP地址要保持再统一网段。

2.首先把控制器与机器人通过网线连接,接到机器人的第三个网口,再把电脑与机器人相连,接机器人的第四个网口。Proifnet 的卡上面2个口是从站功能,下面2个口是主站接口。

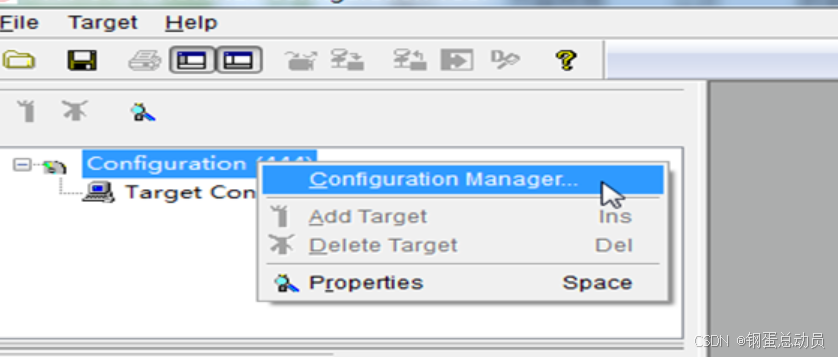
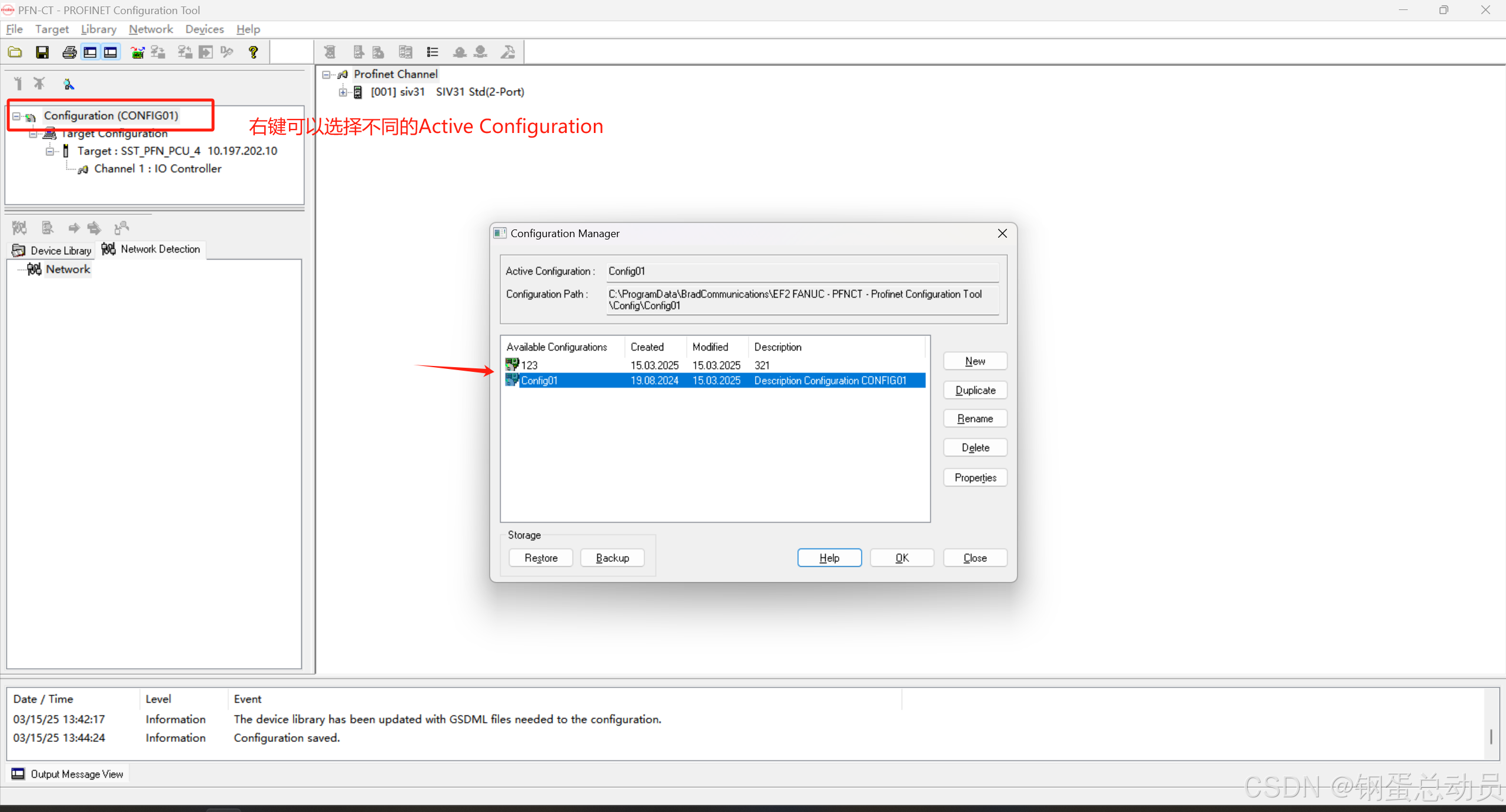
3.打开PFN-CT软件,右键创建一个configuration。
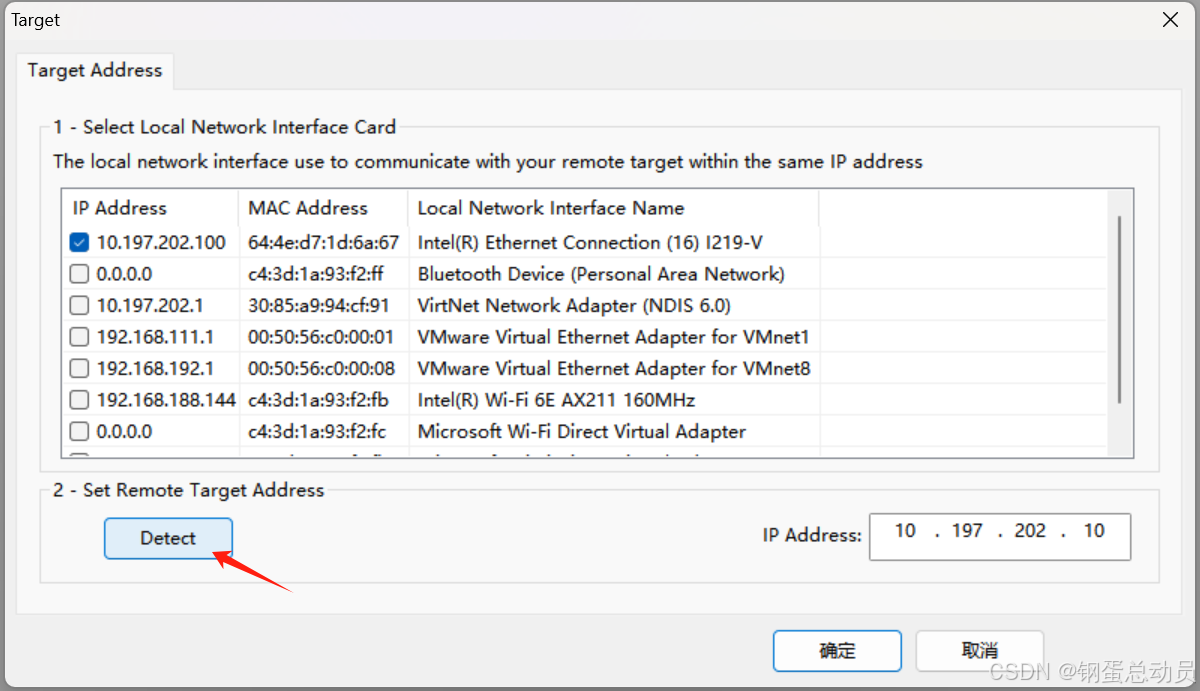
4.添加一个 target configuration
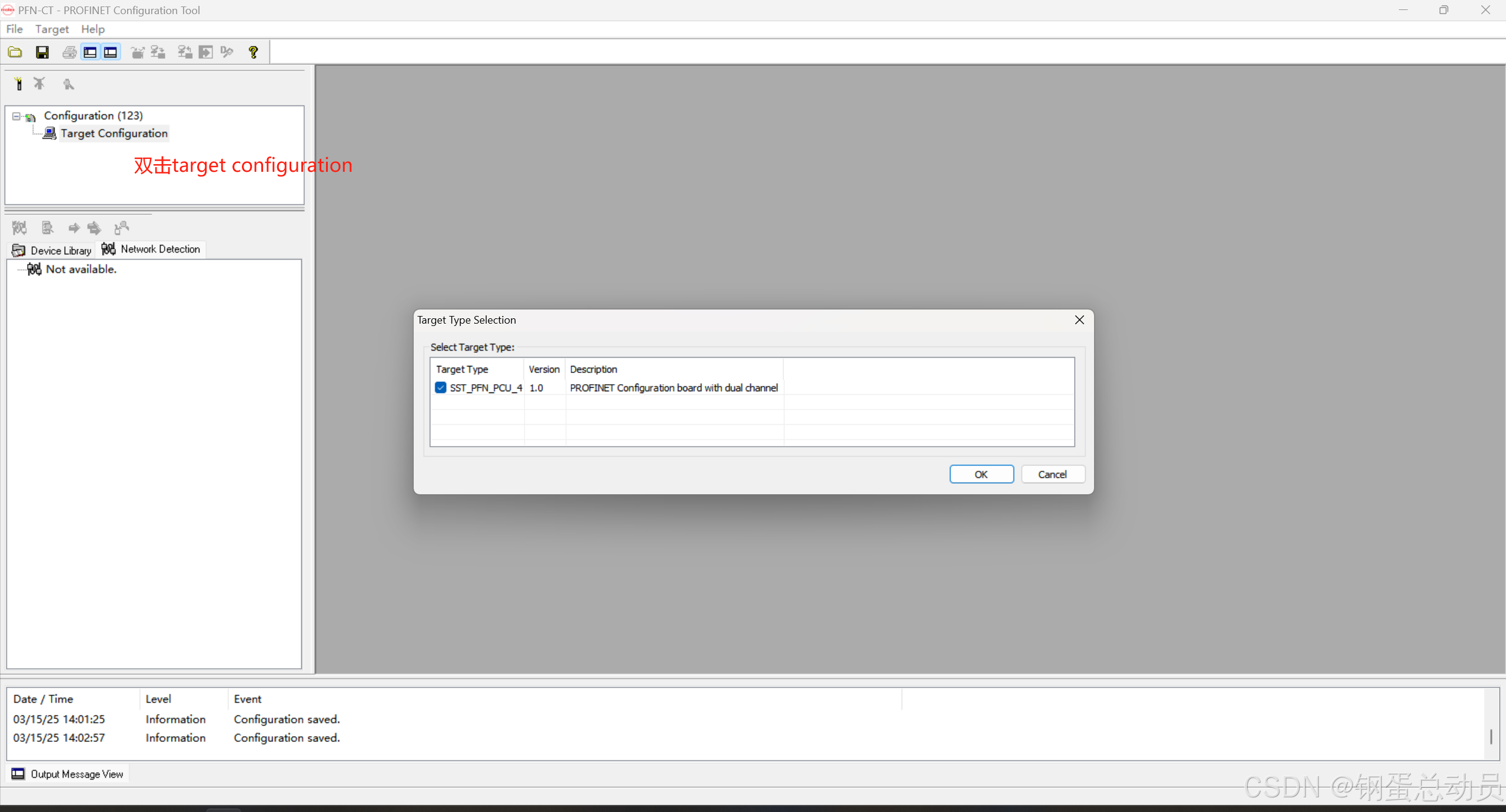
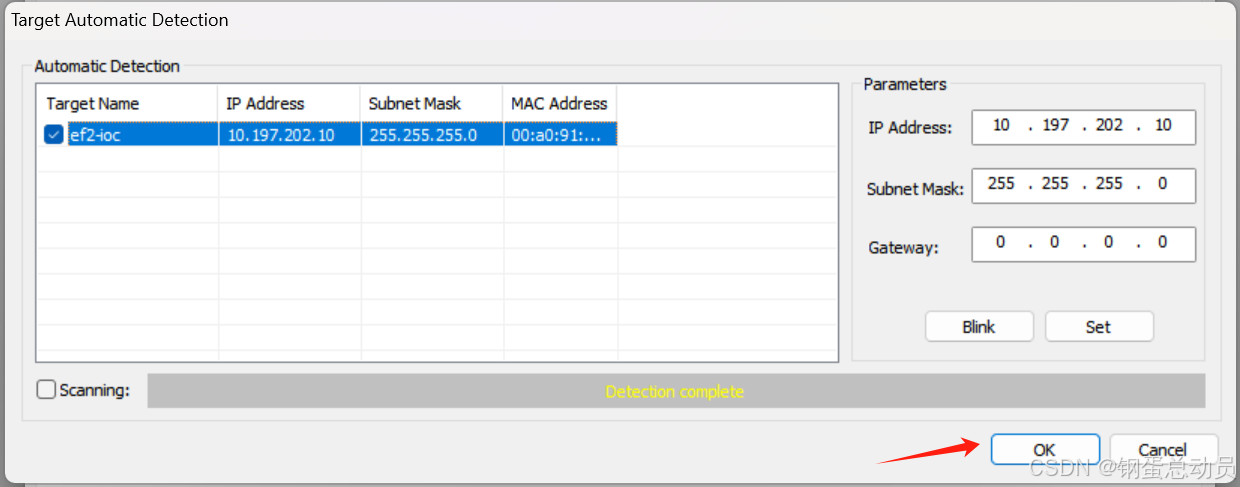
5.点击OK,扫描出来是机器人IP,输入电脑的IP,两者不能是同一地址。
6.完成后返回主界面,点击Connection![]() ,此时图标会从灰色变成白色
,此时图标会从灰色变成白色![]()
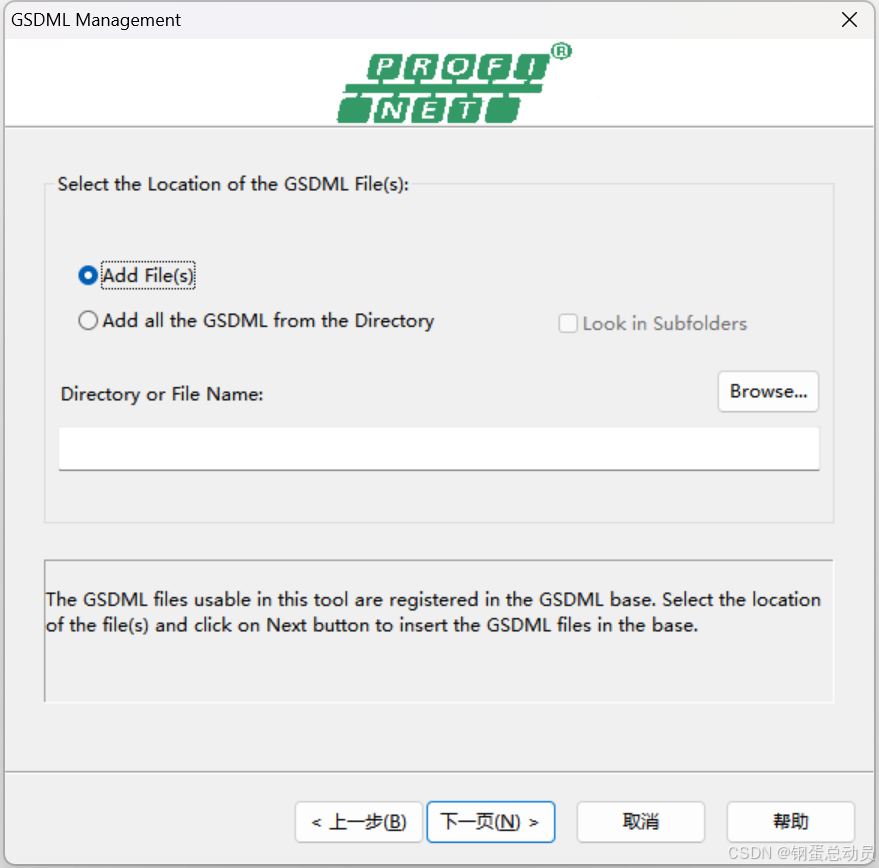
7.开始导入GSD文件,如下图,文件保存位置不能是中文,不然会导入失败。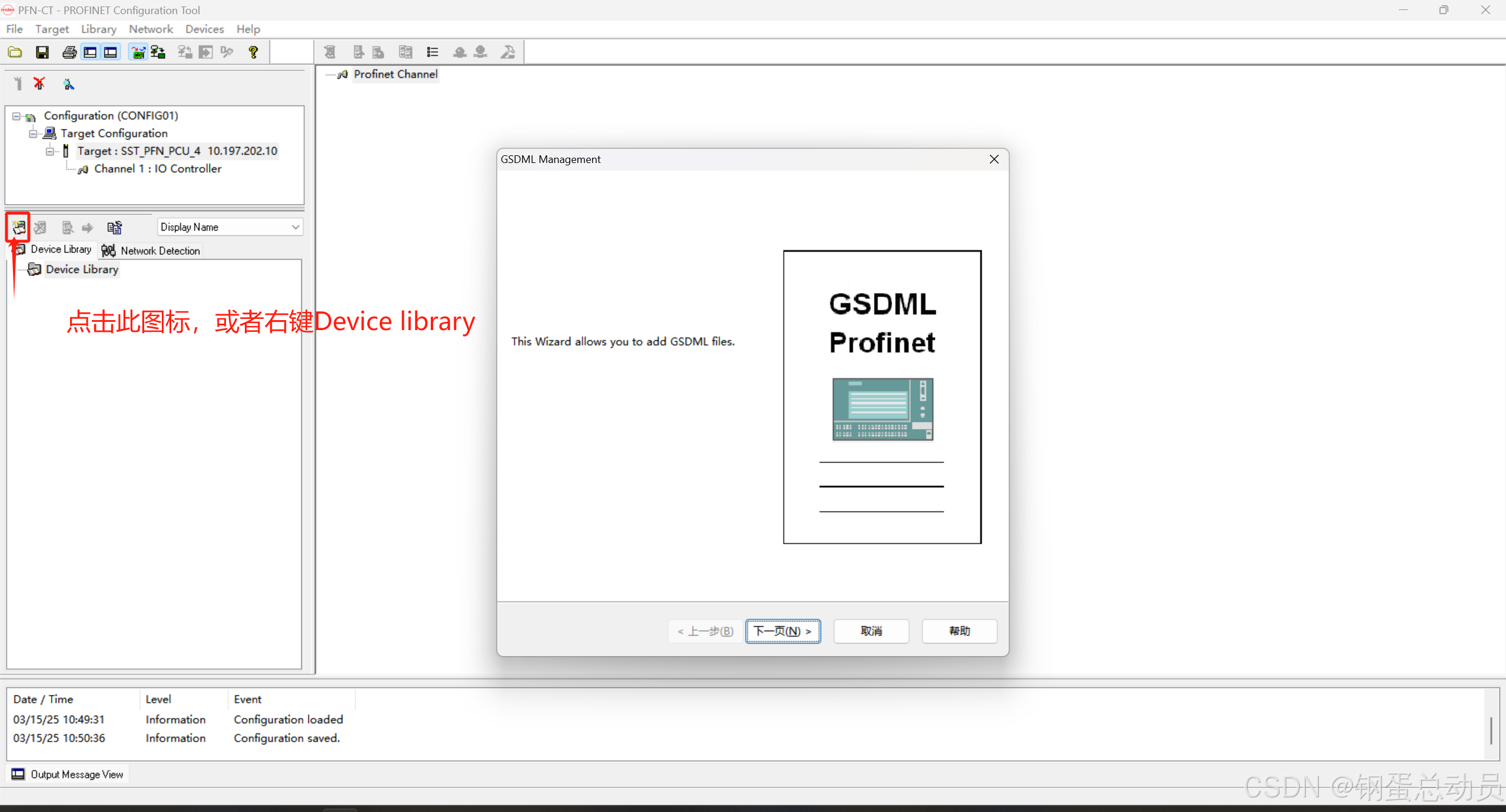
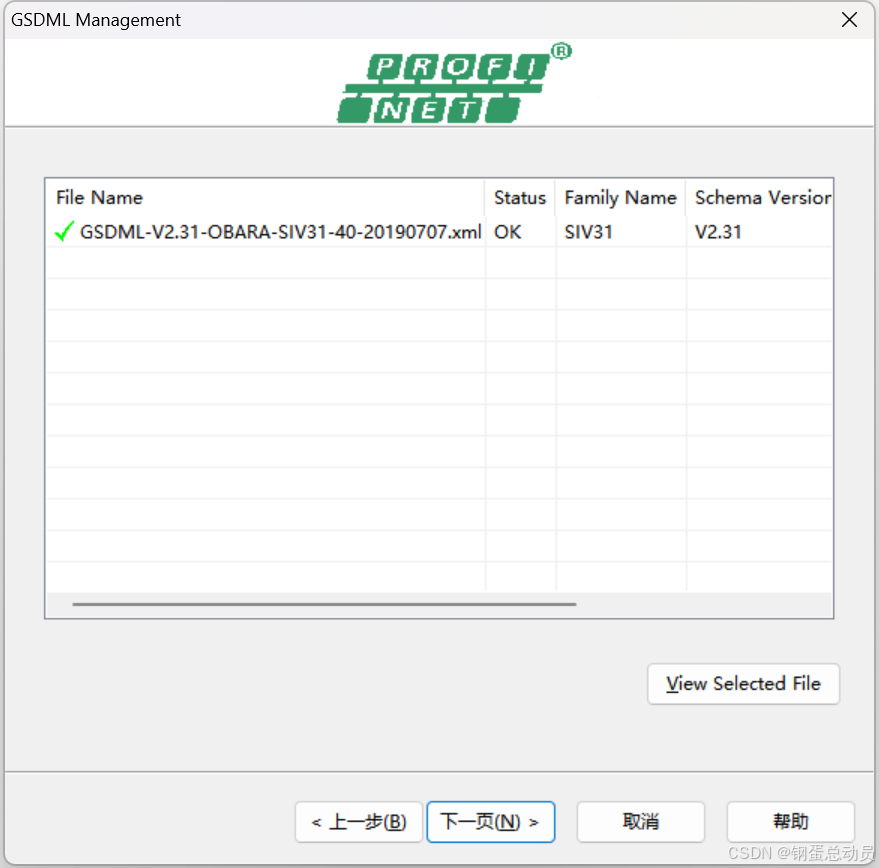
8.文件导入成功后,界面会有如下显示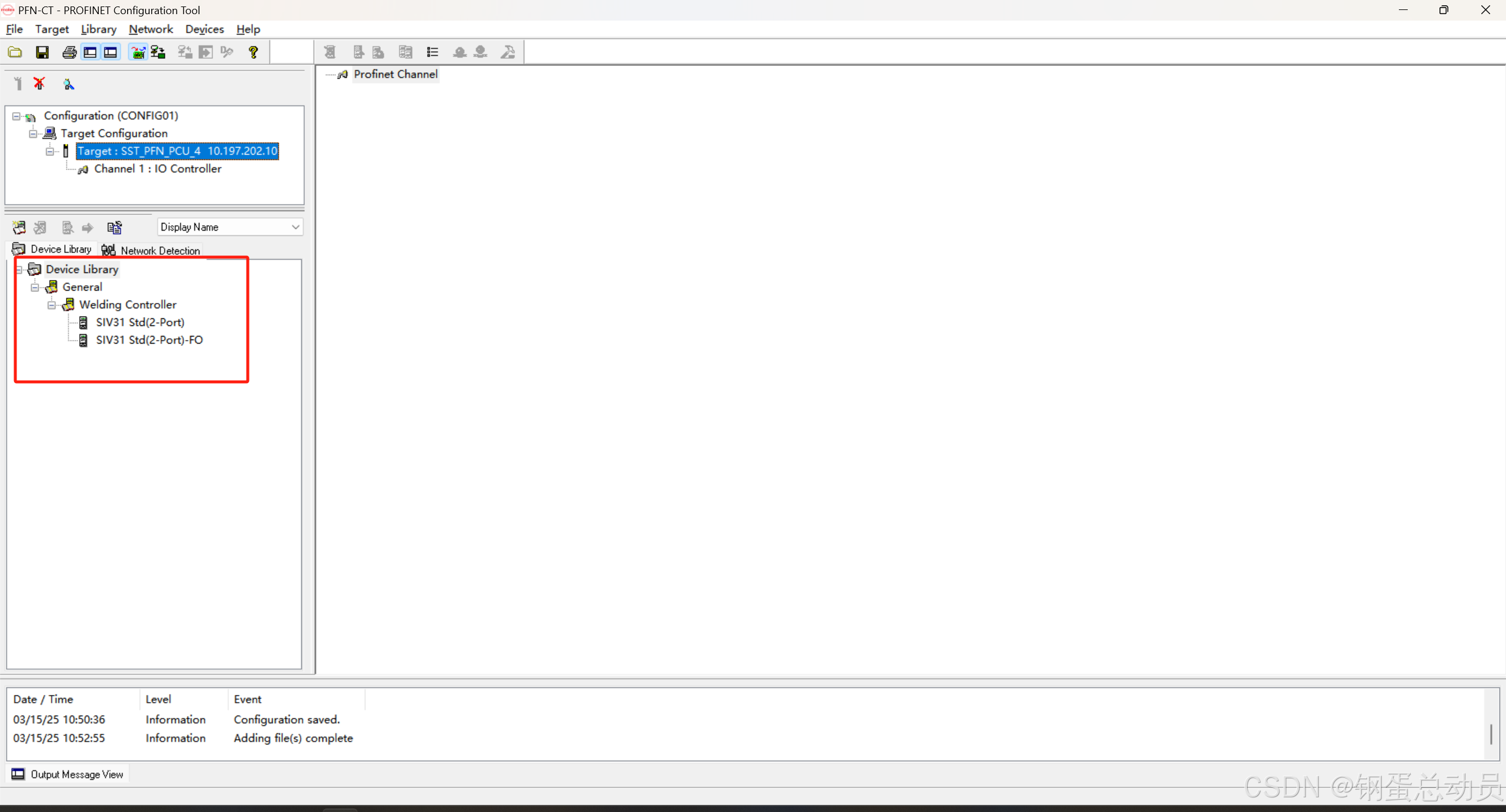
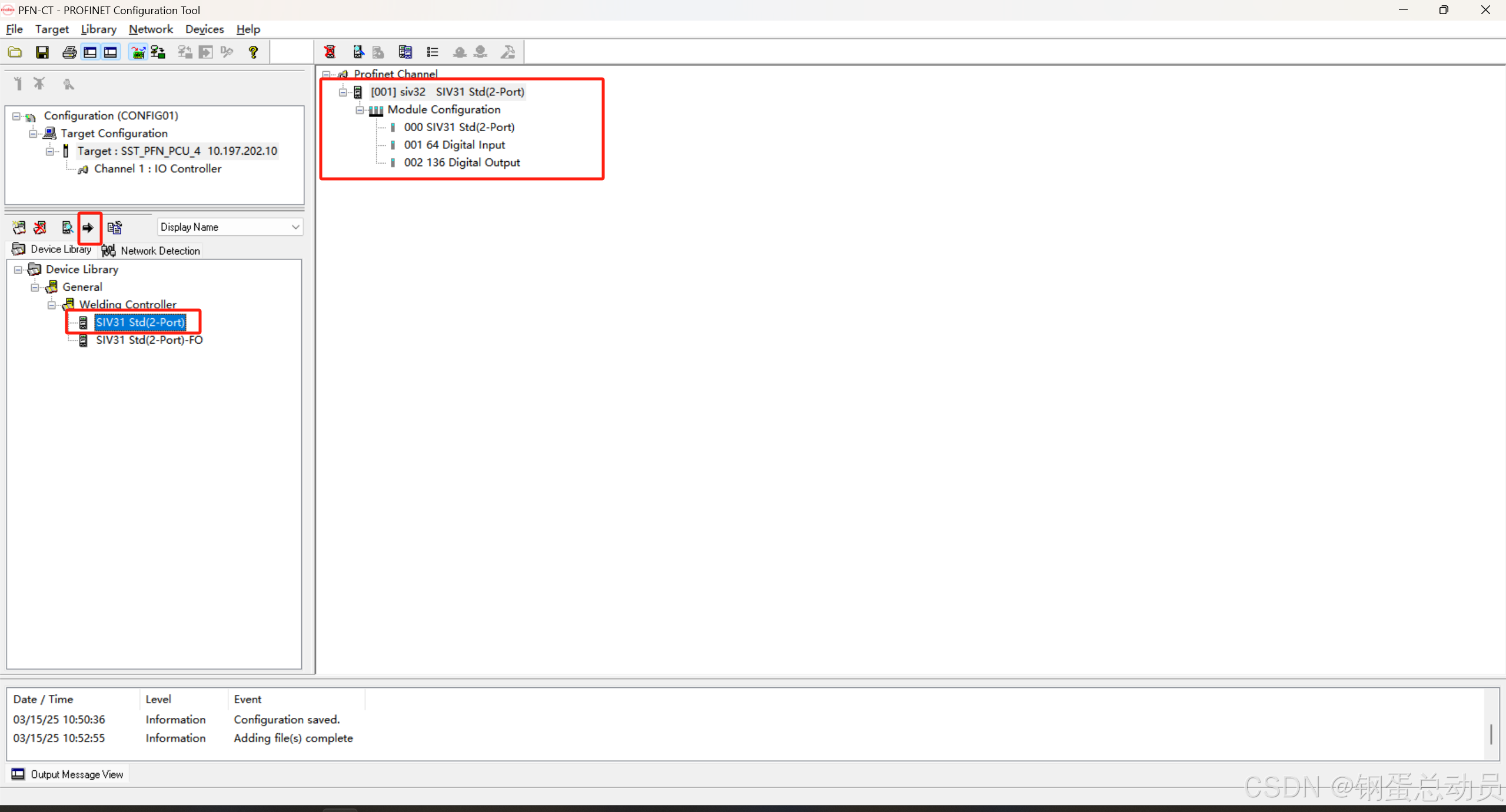
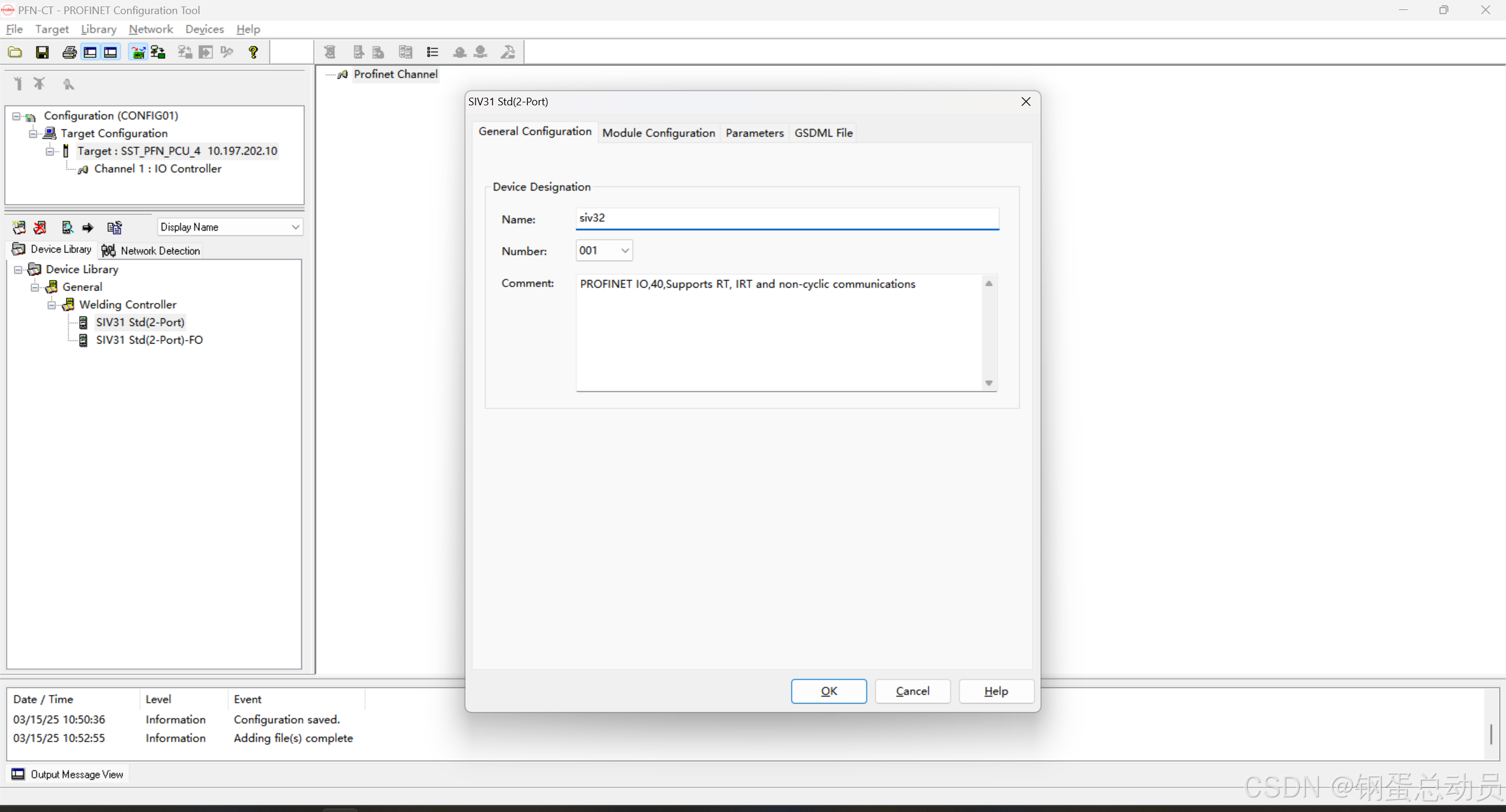
9.点击SIV31 std(2-port),点击“→”,会在右侧生成模块名称。
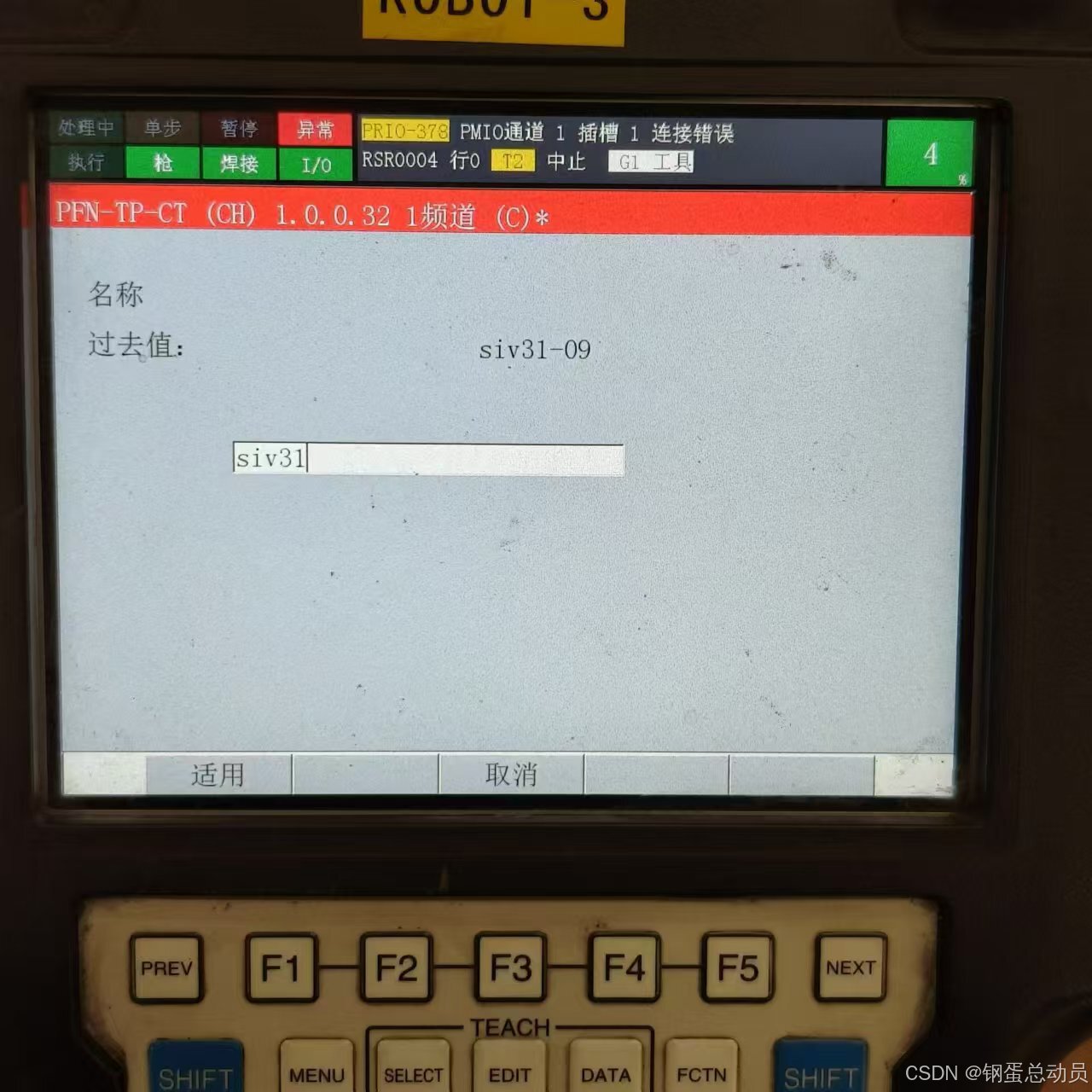
10.双击右侧模块,更改“模块名称”(在接下来的操作中,示教器侧的“配置名称”要这个名称保持一致。),点击OK.
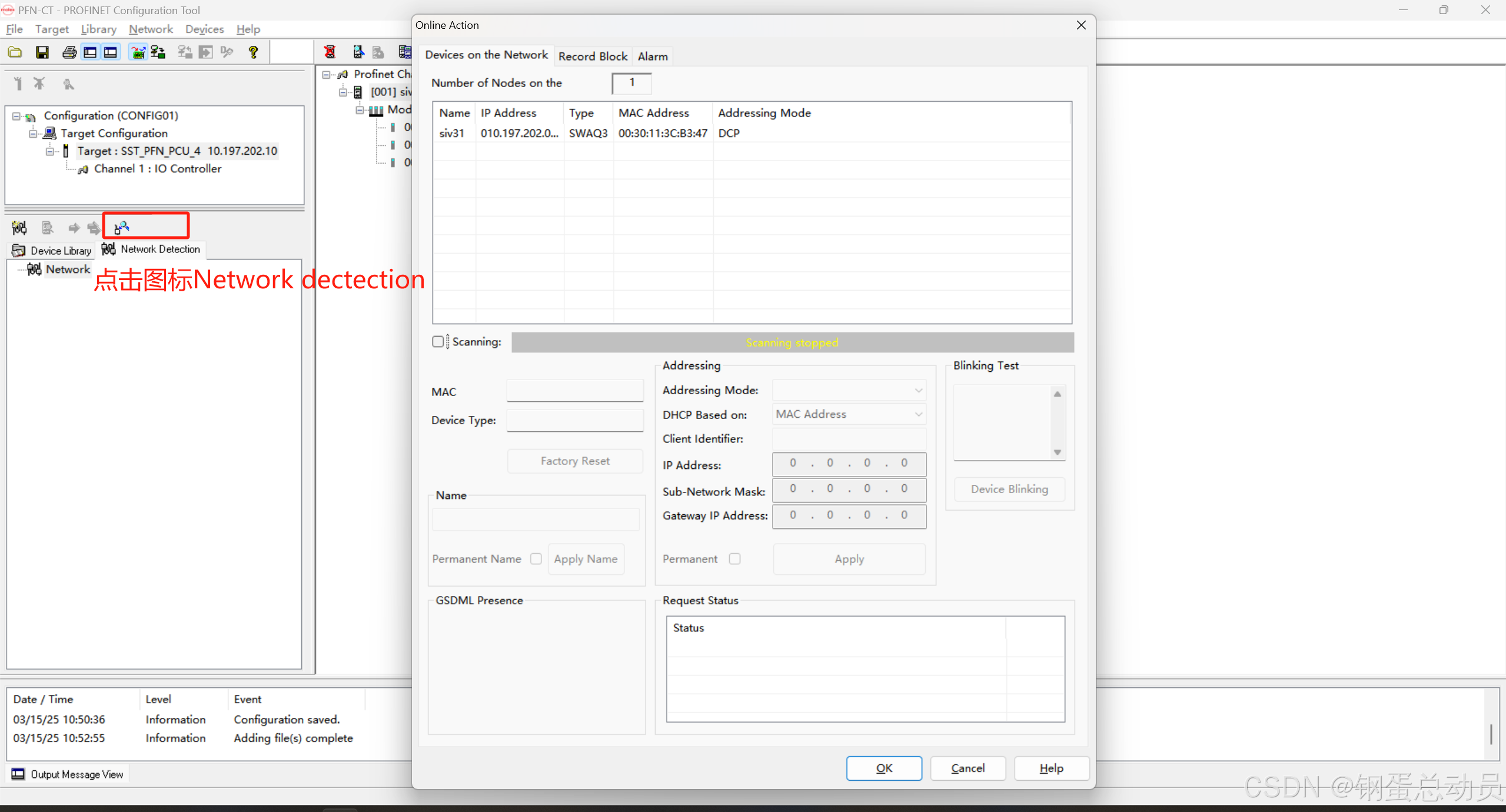
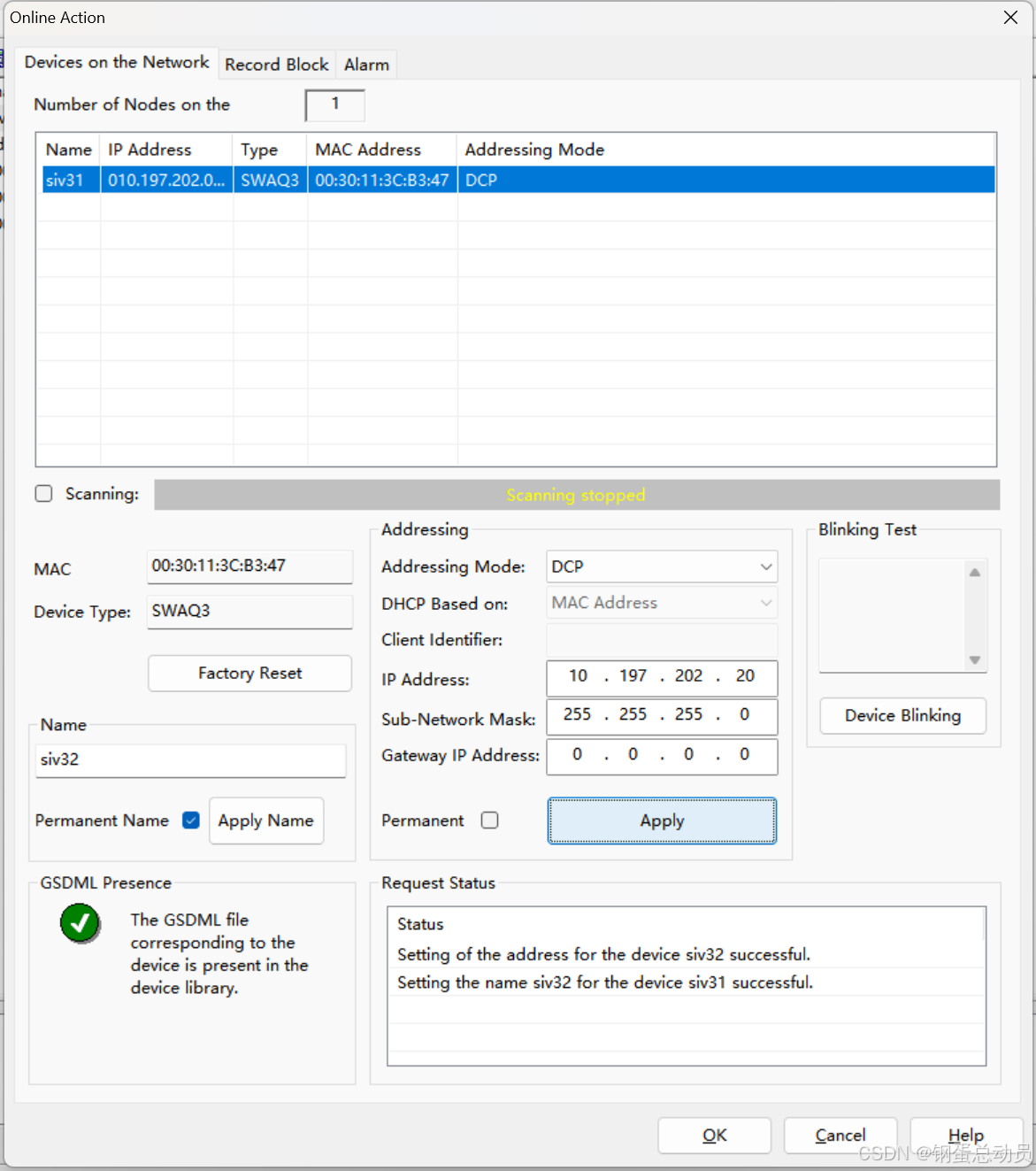
11.点击图标Network Detection,在线扫描出来如下画面,点击蓝色部分,更改模块名(同上),在Permanent Name处打勾,点击Apply name,再点击Apply,点击OK完成。
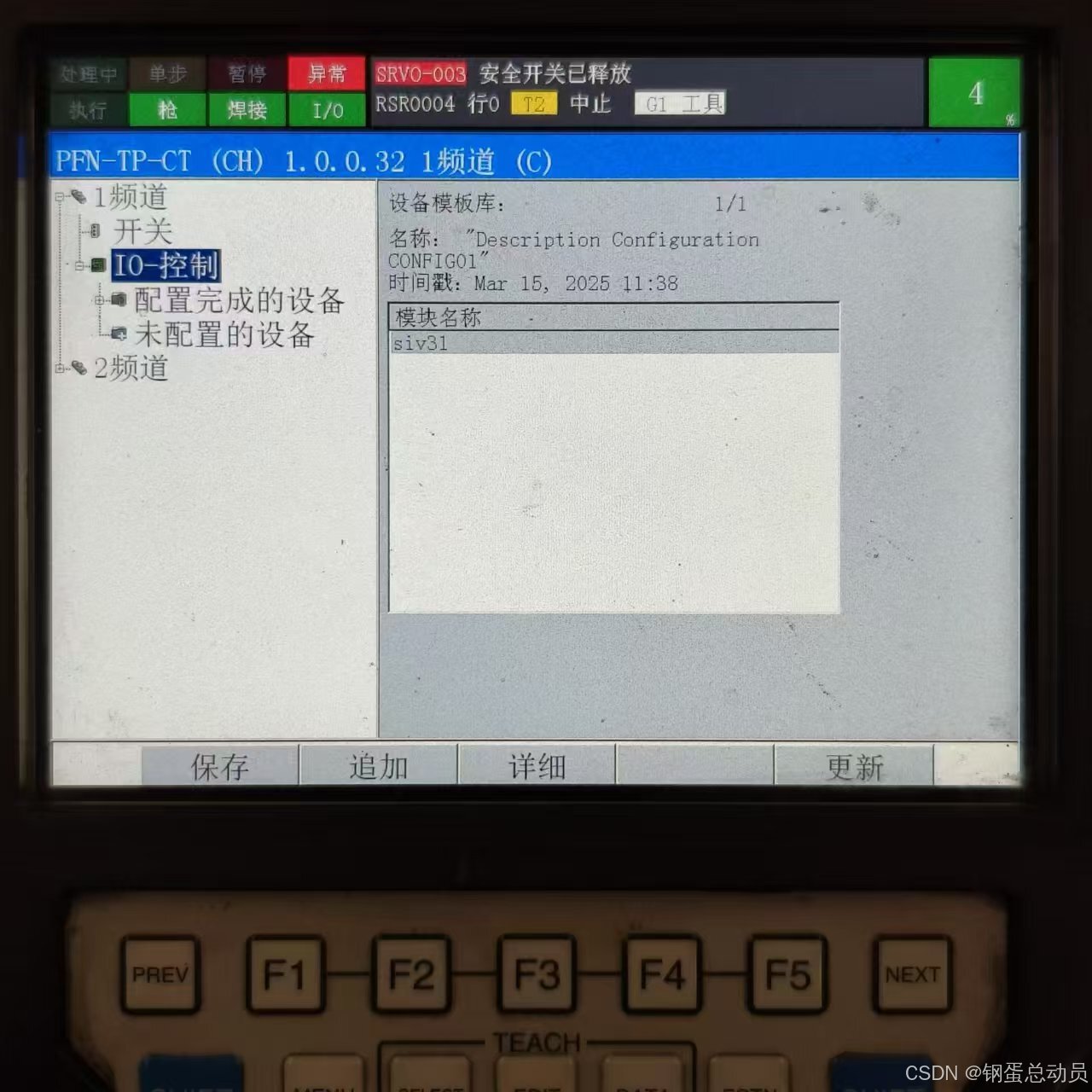
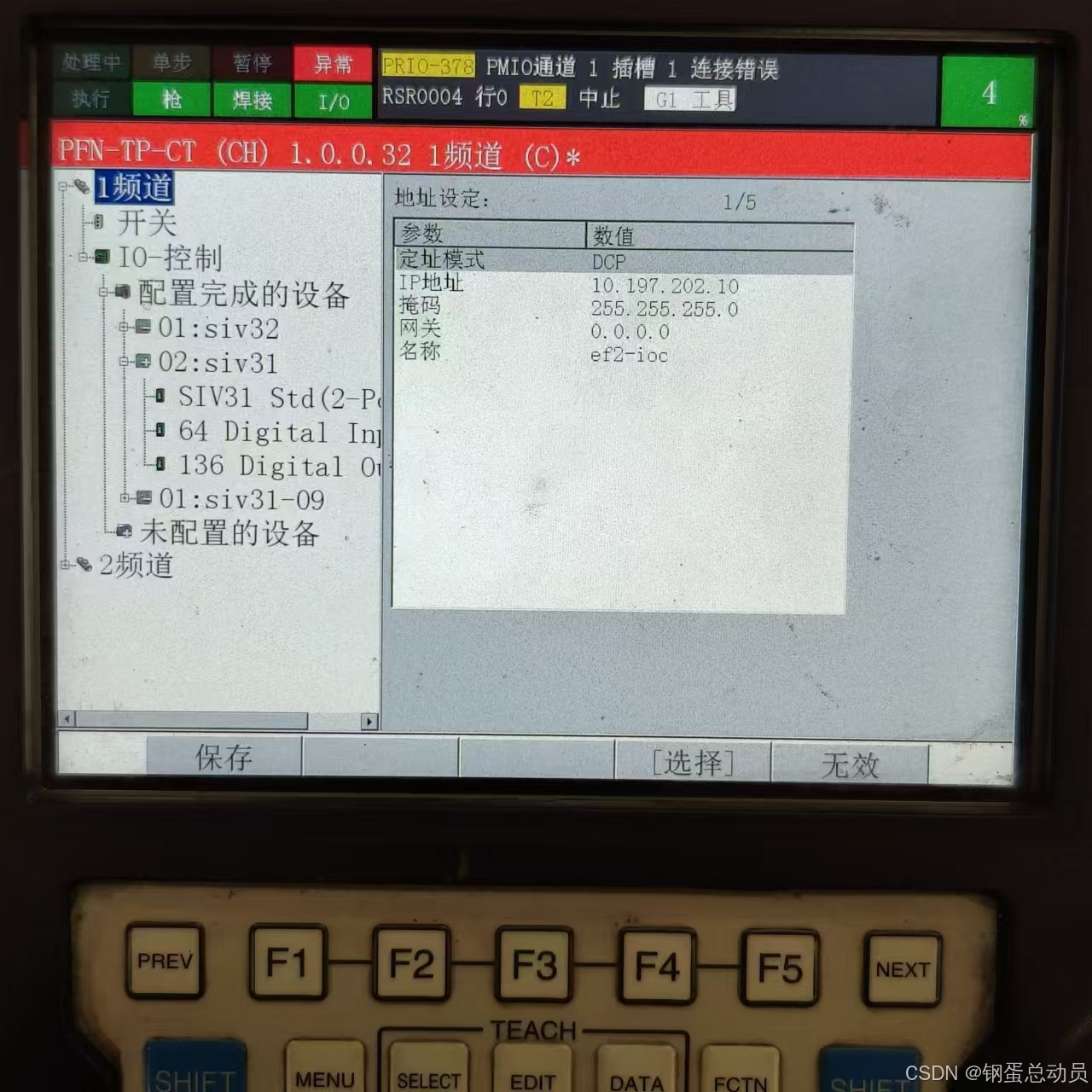
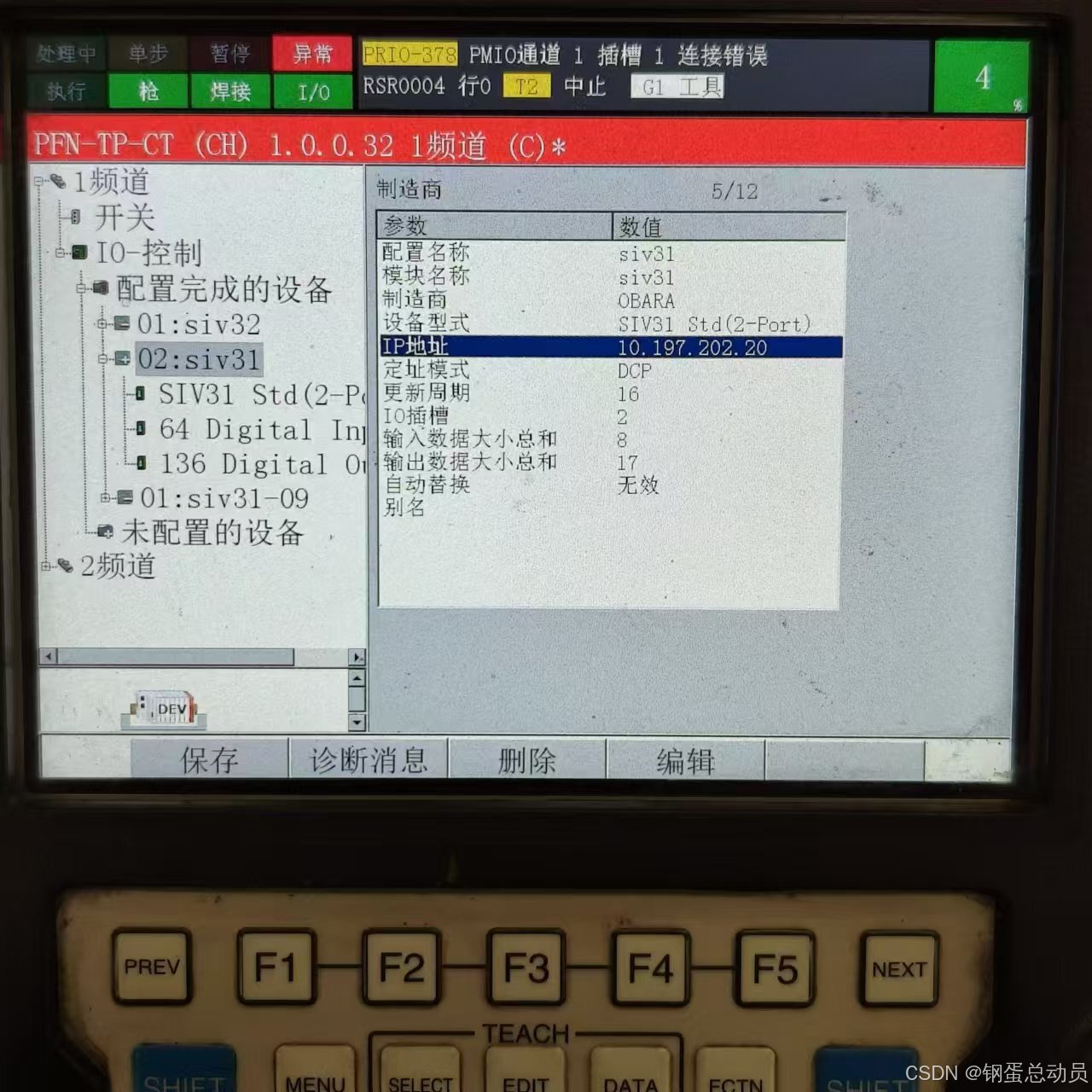
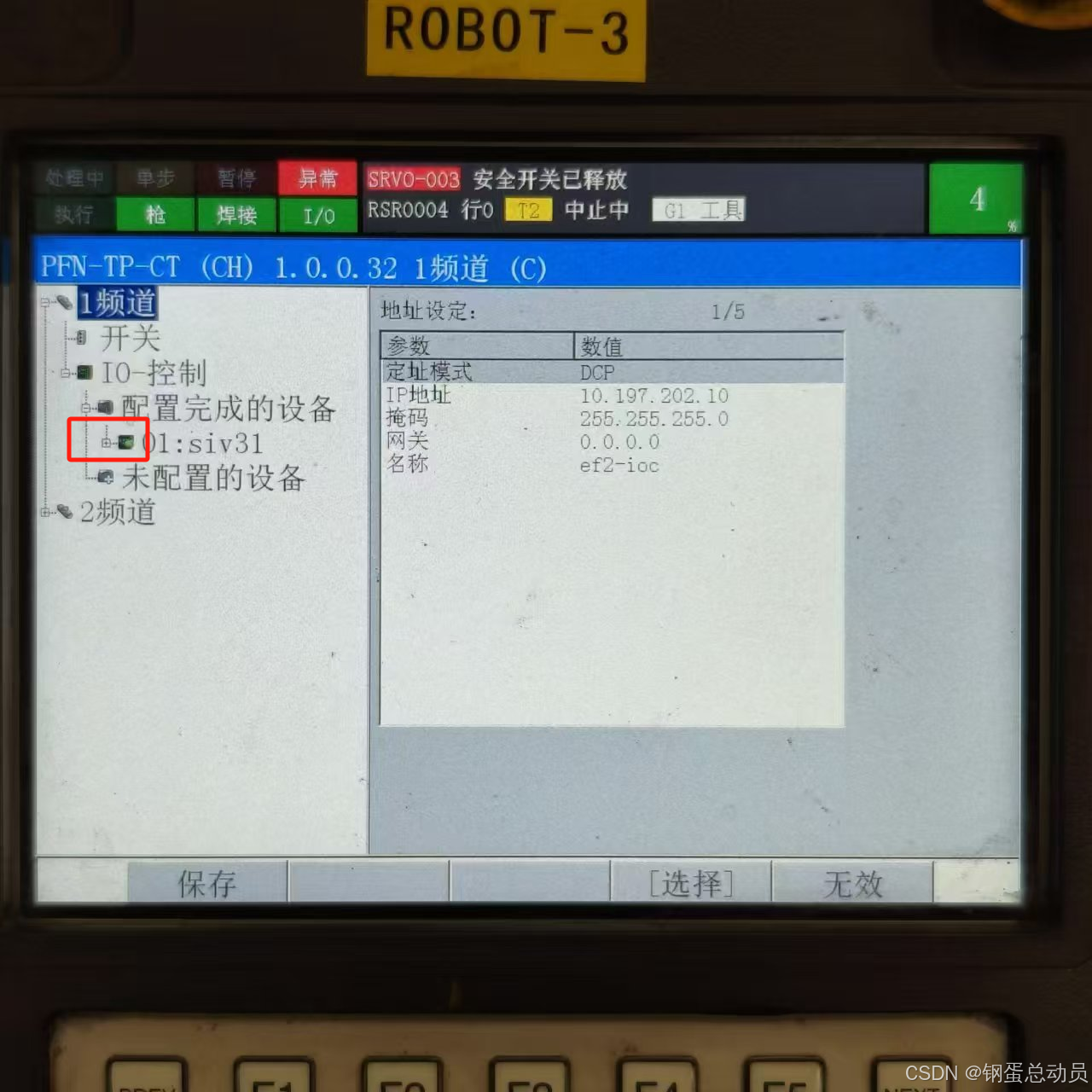
12.点击图标,下载至机器人侧。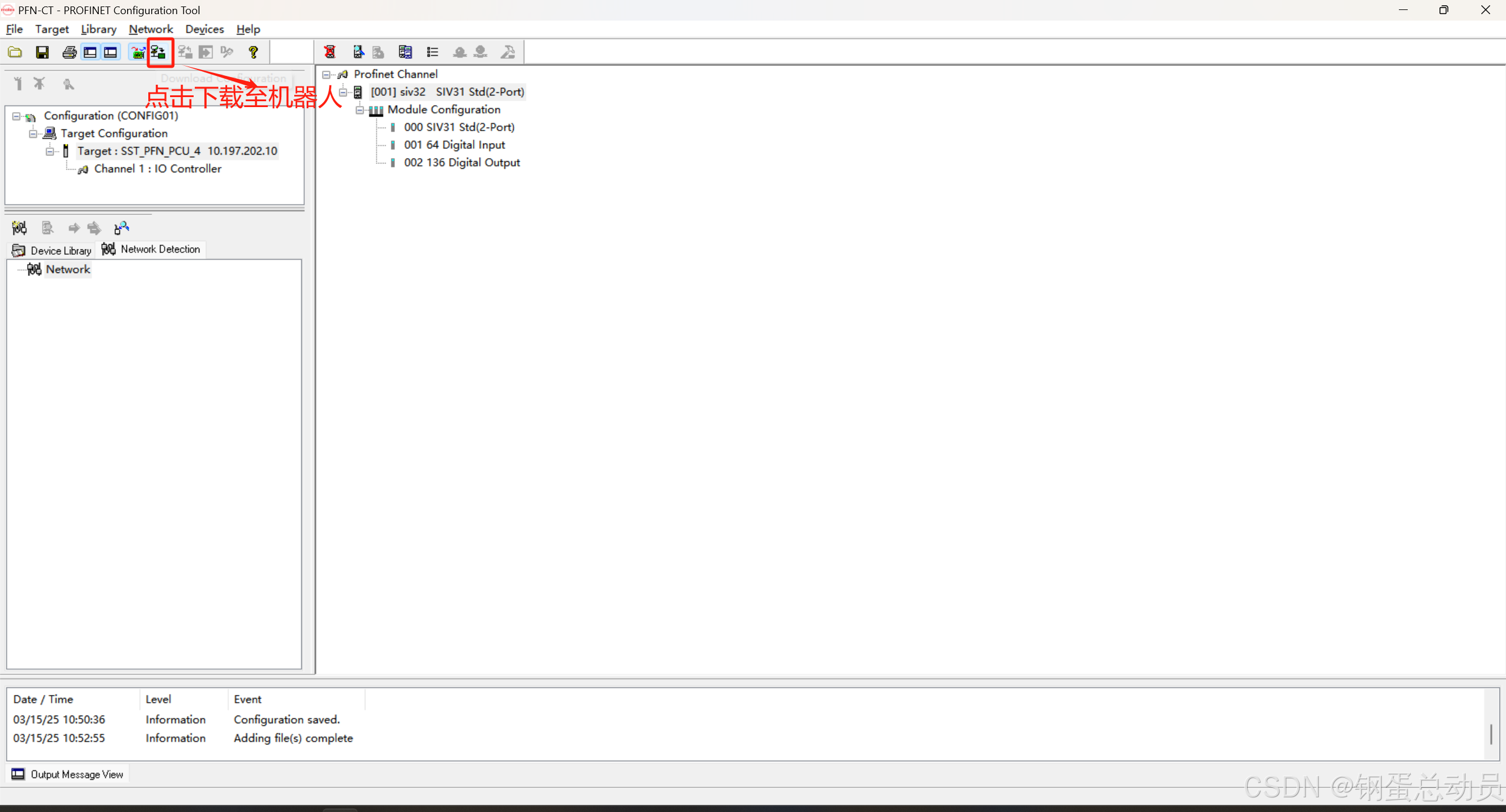 13.打开机器人侧,点击更新,再点击追加,在追加后在IO单元里面,把机器人侧的IP改成和焊机在同一域的地址。“配置名称”和“模块名称”要保持一致,再点击适用,再点击保存,保存成功上边蓝色横条会变成红色,配置无误后关机重启。
13.打开机器人侧,点击更新,再点击追加,在追加后在IO单元里面,把机器人侧的IP改成和焊机在同一域的地址。“配置名称”和“模块名称”要保持一致,再点击适用,再点击保存,保存成功上边蓝色横条会变成红色,配置无误后关机重启。
机器人侧IP
焊机侧IP
14.重启完成后,左侧指示灯会变成绿色,表示成功连接。
温馨提示,如果焊接碰到以下报警,那就是插槽选错
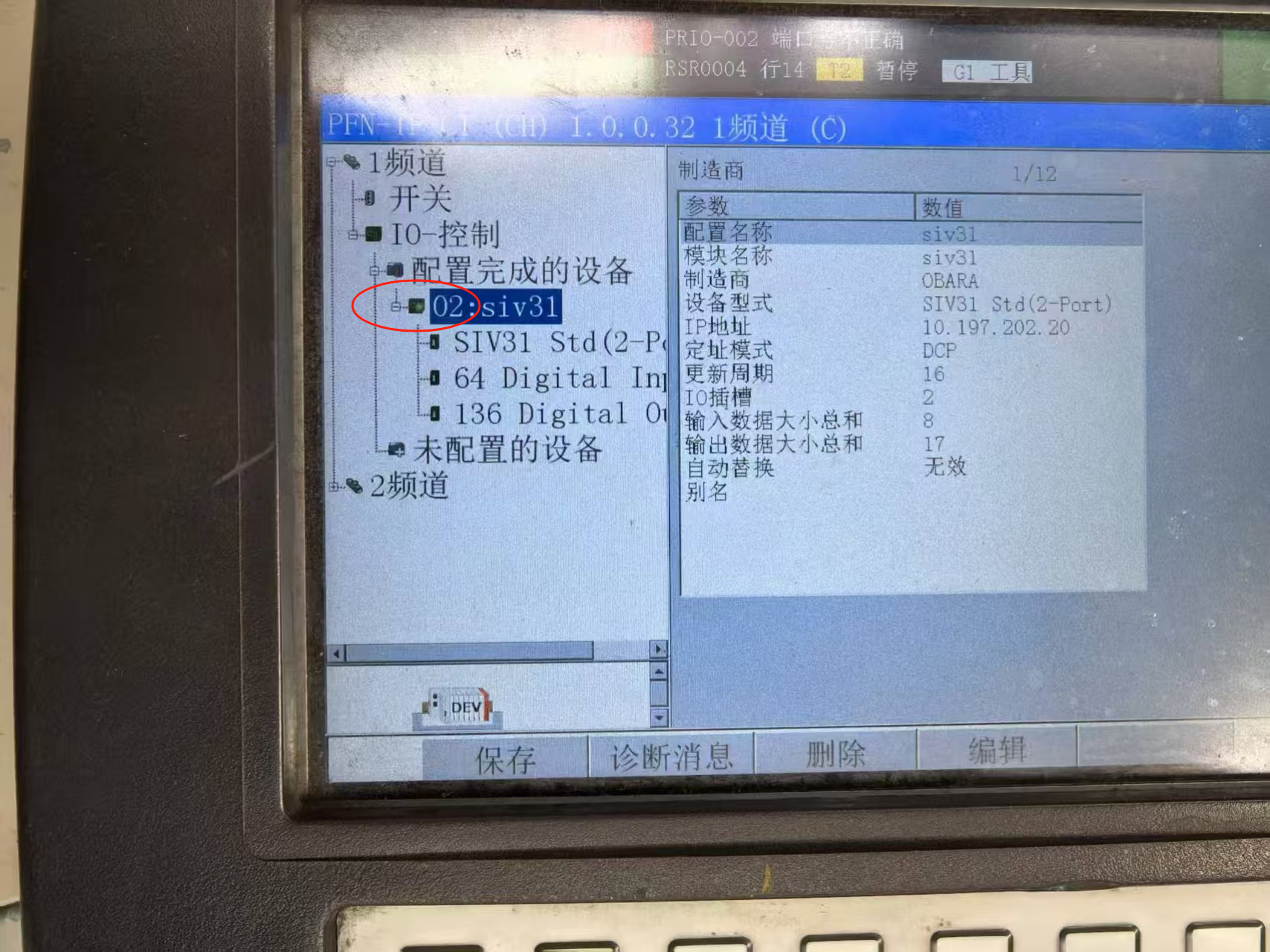
重新来一遍,在此处选择1。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 13
13 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)