中国大学MOOC--【机器人操作系统】 笔记3——roscpp
·
tips:本系列笔记通过学习 中国大学MOOC–【机器人操作系统】一课而形成,若有问题错误或者侵权请联系我删除。
官方教程链接:https://sychaichangkun.gitbooks.io/ros-tutorial-icourse163/content/chapter2/2.1.html
ROS为机器人开发者们提供了不同语言的编程接口,比如C++接口叫做roscpp,Python接口叫做rospy,Java接口叫做rosjava。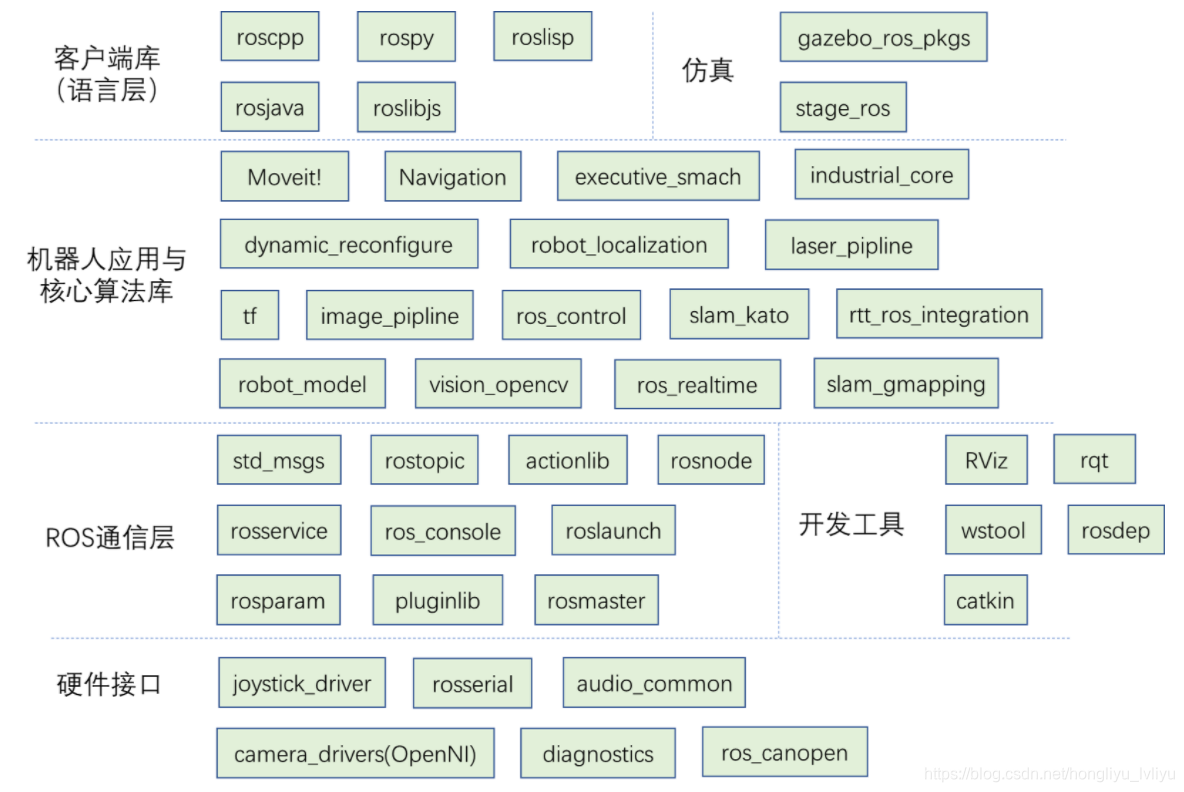
roscpp
1. 组成部分
- 调用ROS的C++接口:
#include <ros/ros.h>
ros::init() : 解析传入的ROS参数,创建node第一步需要用到的函数
ros::NodeHandle : 和topic、service、param等交互的公共接口
ros::master : 包含从master查询信息的函数
ros::this_node:包含查询这个进程(node)的函数
ros::service:包含查询服务的函数
ros::param:包含查询参数服务器的函数,而不需要用到NodeHandle
ros::names:包含处理ROS图资源名称的函数
2. 节点操作
2.1 初始化
- 调用了
ros::init()函数,从而初始化节点的名称和其他信息 - 创建
ros::NodeHandle对象,也就是节点的句柄,它可以用来创建Publisher、Subscriber以及做其他事情
2.2 关闭节点
- 直接在终端上按 Ctrl+C
- 调用
ros::shutdown()来手动关闭节点
2.3 NodeHandle常用成员函数
//创建话题的publisher
ros::Publisher advertise(const string &topic, uint32_t queue_size, bool latch=false);
//第一个参数为发布话题的名称
//第二个是消息队列的最大长度,如果发布的消息超过这个长度而没有被接收,那么就的消息就会出队。通常设为一个较小的数即可。
//第三个参数是是否锁存。某些话题并不是会以某个频率发布,比如/map这个topic,只有在初次订阅或者地图更新这两种情况下,/map才会发布消息。这里就用到了锁存。
//创建话题的subscriber
ros::Subscriber subscribe(const string &topic, uint32_t queue_size, void(*)(M));
//第一个参数是订阅话题的名称
//第二个参数是订阅队列的长度,如果受到的消息都没来得及处理,那么新消息入队,就消息就会出队
//第三个参数是回调函数指针,指向回调函数来处理接收到的消息
//创建服务的server,提供服务
ros::ServiceServer advertiseService(const string &service, bool(*srv_func)(Mreq &, Mres &));
//第一个参数是service名称
//第二个参数是服务函数的指针,指向服务函数。指向的函数应该有两个参数,分别接受请求和响应。
//创建服务的client
ros::ServiceClient serviceClient(const string &service_name, bool persistent=false);
//第一个函数式service名称
//第二个参数用于设置服务的连接是否持续,如果为true,client将会保持与远程主机的连接,这样后续的请求会快一些。通常我们设为flase
//查询某个参数的值
bool getParam(const string &key, std::string &s);
bool getParam (const std::string &key, double &d) const;
bool getParam (const std::string &key, int &i) const;
//从参数服务器上获取key对应的值,已重载了多个类型
//给参数赋值
void setParam (const std::string &key, const std::string &s) const;
void setParam (const std::string &key, const char *s) const;
void setParam (const std::string &key, int i) const;
//给key对应的val赋值,重载了多个类型的val

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)