一文读懂 IMU(惯性测量单元):自动驾驶、无人机与机器人的“小脑”
目录
前言
无论你是玩过大疆无人机、戴过 VR 头显、还是了解过自动驾驶和机器人,你都绝对绕不开一个至关重要的核心传感器——IMU(Inertial Measurement Unit,惯性测量单元)。
如果说摄像头和激光雷达是机器人的“眼睛”,那么 IMU 就是机器人的**“小脑”。即使在蒙上眼睛(失去视觉和 GPS 信号)的情况下,IMU 依然能让机器感知到自己的姿态、方向和运动状态。
今天,我们就来扒一扒 IMU 的底层逻辑,看看这个极其微小却又极其强大的传感器到底是如何工作的。
一、 什么是 IMU?它里面到底装了什么?
IMU 是一种用于测量物体三轴姿态角(或角速率)加速度的装置。市面上常见的 IMU 通常被称为“六轴”或“九轴”传感器,这取决于它内部集成了哪些微机电系统(MEMS)。
一个标准的 IMU 通常由以下三大核心组件构成:
1. 加速度计(Accelerometer)
- 作用: 测量物体在 X, Y, ZX,Y,Z 三个物理轴向上的线加速度。
- 基本原理: 把它想象成一个装在弹簧上的小质量块。当你加速移动时,由于惯性,质量块会挤压弹簧。通过测量弹簧的形变量,就能算出当前的加速度。
- 静态特性: 即使静止不动,加速度计也会受到重力(约 9.8m/s²)的影响,它会始终感知到一个向上的加速度。这个特性常被用来计算物体的俯仰角(Pitch)横滚角(Roll)。
2. 陀螺仪(Gyroscope)
- 作用: 测量物体绕 X, Y, ZX,Y,Z 三个轴旋转的角速度。
- 基本原理: 利用科里奥利力(Coriolis force)。当物体在旋转体系中进行直线运动时,会受到一个垂直于运动方向的力,通过检测这个力即可推算出旋转角速度。
- 不可替代性: 加速度计在剧烈运动时会有极大的噪声,而陀螺仪对瞬时的旋转动作极其敏感,两者正好互补。
3. 磁力计(Magnetometer)—— “九轴”特有
- 作用: 测量地球磁场,相当于一个电子指南针。
- 为什么需要它? 加速度计无法测量绕重力方向的旋转(即偏航角 Yaw),而陀螺仪的积分随着时间推移会产生累积误差(漂移)。磁力计可以通过对齐地球磁场(地磁北极)来消除偏航角的长期漂移。
二、 6轴 vs 9轴 到底有什么区别?
在做硬件选型时,经常会看到不同自由度(DOF)的 IMU,用一张表带你快速看懂:
|
传感器类型 |
包含组件 |
主要功能 |
典型应用场景 |
|
6轴 (6-DOF) |
3轴加速度计 + 3轴陀螺仪 |
测量线加速度与角速度,可计算 Pitch 和 Roll |
手机屏幕翻转、计步器、简单的平衡车 |
|
9轴 (9-DOF) |
6轴 + |
增加绝对航向感知,彻底解决 Yaw 角漂移问题 |
无人机飞控、VR 头显追踪、自动驾驶 |
3轴磁力计
三、 IMU 的数学本质:运动学积分
IMU 的核心价值在于推算导航(Dead Reckoning)。只要知道一个物体的初始状态(位置和速度),理论上通过 IMU 不断积分,就能算出它在任意时刻的位置。
这是一个经典的运动学物理问题,通过对微小时间间隔 \Delta tΔt 内的数据进行累加(积分):
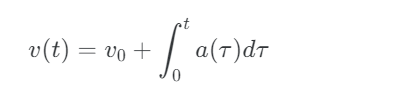
1. 速度的更新: 速度是加速度对时间的积分。
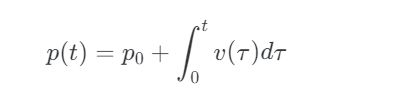
2. 位置的更新: 位置是速度对时间的积分。
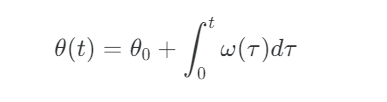
3. 姿态(角度)的更新: 角度是角速度(陀螺仪输出)对时间的积分。
四、 IMU 的致命弱点:误差漂移(Drift)
看着上面的积分公式,似乎我们只要拥有一个 IMU 就可以天下无敌了?绝对不是。
现实中的传感器是有**噪声(Noise)和零偏(Bias)的。哪怕是一个极其微小的误差,在经过两次积分计算位置后,误差会随着时间的平方呈指数级放大:
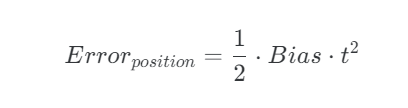
也就是说,如果仅靠一个普通的消费级 IMU 来定位,可能几秒钟后,系统以为你已经飞到火星去了。这就引出了目前工程界极其核心的一门技术——传感器融合(Sensor Fusion)。
如何解决漂移?
在实际工业和自动驾驶中,从来不会单凭 IMU 孤军奋战,通常会结合其他传感器进行误差修正:
- 数据滤波算法: 采用互补滤波(Complementary Filter)卡尔曼滤波(Kalman Filter)。利用加速度计的低频稳定性和陀螺仪的高频动态性进行数据融合。
- GNSS + IMU(组合导航): GPS 负责提供没有累计误差的绝对低频定位,IMU 负责提供高频的连续姿态,两者结合是目前自动驾驶的标准方案。
- VIO(视觉惯性里程计): 结合摄像头(SLAM 技术),利用视觉特征点匹配来限制 IMU 的发散,广泛应用于扫地机器人和 AR/VR。
总结
IMU 是一项将微观物理现象与宏观运动学完美结合的艺术。从最初装在阿波罗登月飞船里跟衣柜一样大的机械陀螺仪,到现在塞在智能手表里比芝麻还小的 MEMS 芯片,IMU 的发展极大地推动了现代机器人和智能设备的繁荣。
搞懂 IMU,是你迈向无人机飞控、自动驾驶感知、以及 SLAM 算法工程师的必经之路!
如果你觉得这篇文章对你有帮助,欢迎点赞、收藏、关注三连!持续分享硬核的前沿技术干货!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)