搞懂 4 类标定:内参、双目、IMU、外参,教你如何轻松看懂机器人视觉精度上限来源!
各位行业同仁、技术伙伴,大家好!
做机器人视觉大概率都遇到过这些场景:机械臂静态抓取明明对准了,一动起来抓工件就偏出几毫米;机器狗低速避障运行稳定,跑快了就误判障碍物距离;人形机器人建图走着走着就漂移,地图越建越歪;做三维数据采集,边缘位置的点云总是扭曲变形,测出来的尺寸始终对不上。
很多人第一反应是算法不行、传感器算力不够,却忽略了最底层的问题——标定没做透。机器人视觉的精度从来不是单一参数决定的,从单颗相机的成像,到双目深度计算,再到IMU运动融合,最后到整机执行,一共四层标定,每一层都锁死了对应的精度上限。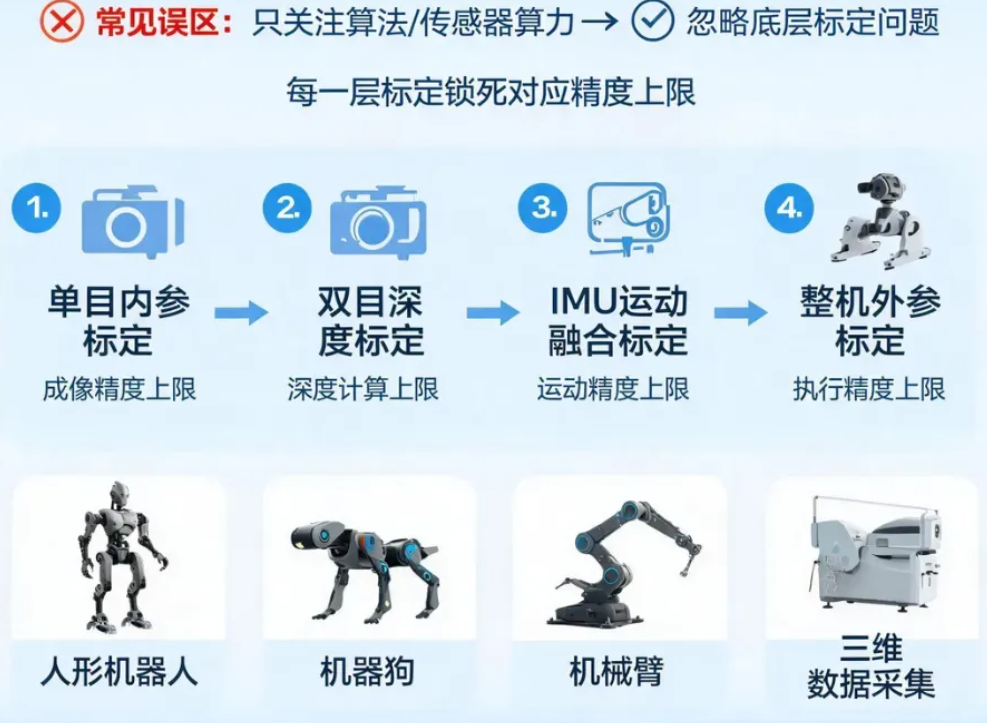
今天我们就把内参、双目、IMU、外参这四类标定讲透,对应到人形机器人、机器狗、机械臂、三维数据采集四大场景,看完你就知道你的项目精度瓶颈到底在哪。
一、相机内参标定:单目成像的几何精度基石
很多人对标定的第一印象就是内参标定,但很少有人说清它到底决定了什么。简单说,相机内参包含焦距、光学主点、畸变系数,解决的核心问题是像素坐标和真实世界坐标的映射关系,它决定了单张画面里,每一个像素对应的真实物理尺寸准不准。
内参标定没做好,最直接的问题就是镜头畸变,图像的画面中心能保持准确,但越往边缘变形越严重。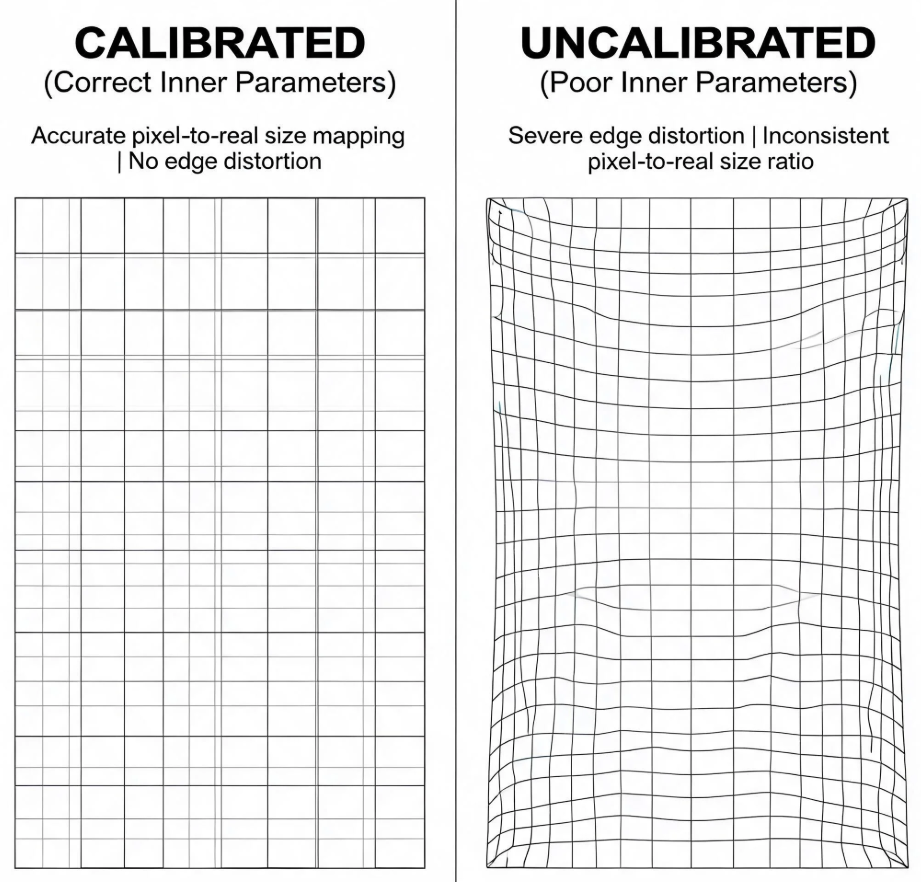
机械臂做工件抓取时,如果目标落在画面边缘,畸变会导致像素坐标换算出的真实位置偏差1-2mm,视觉上看着对准了,夹爪落下去就是偏的。
机器狗导航避障时,画面边缘的障碍物会被畸变 “拉远” 或 “拉近”,低速下还能靠算法修正,高速行进时很容易出现避障误判。
三维数据采集时,边缘区域的点云会出现弧形扭曲,体积测量、尺寸检测的结果直接失效,只能用画面中心区域采集,大幅浪费有效视野。
二、双目立体标定:深度测距的精度天花板
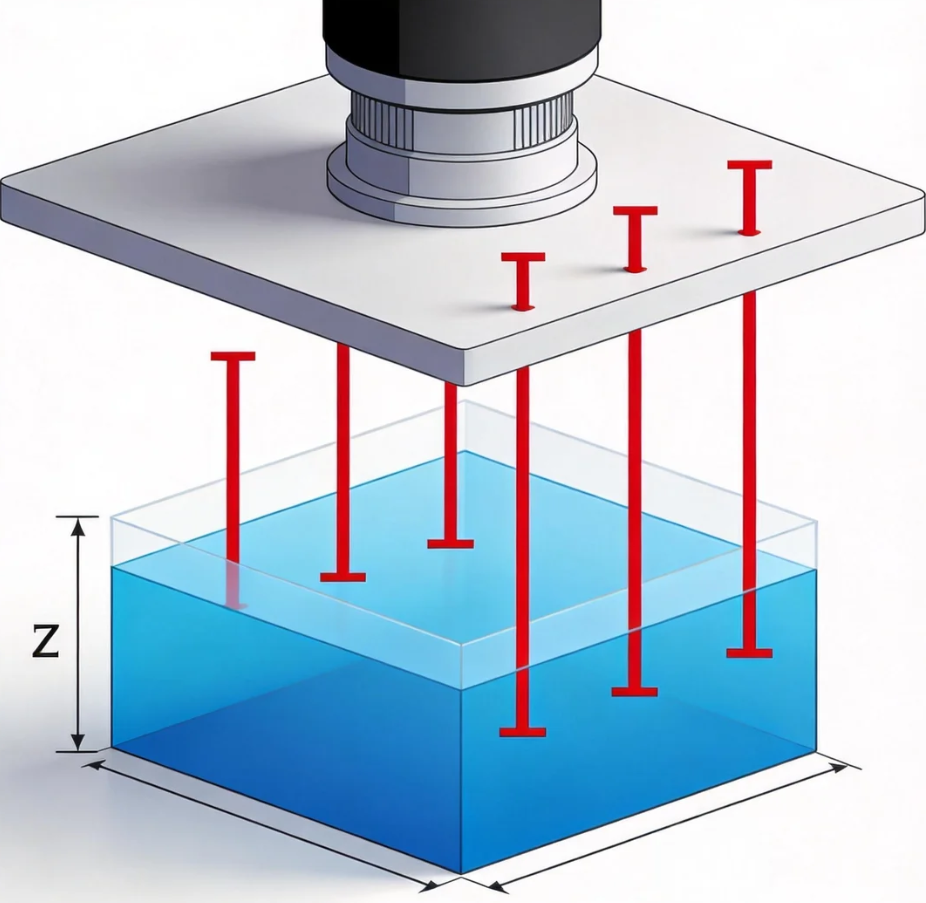
如果说内参决定了单目画面的平面精度,那双目立体标定就决定了立体视觉的深度精度——也就是我们常说的 Z 轴测距准不准。
双目测距的核心原理是视差计算:左右两个相机同时拍摄同一个物体,通过像素差算出物体距离。而这一切的前提,是准确掌握两个相机的相对位置(基线长度)和光轴角度。
双目立体标定做的就是这件事,校准左右目的内参一致性、基线精度、光轴平行度。标定误差有多大,深度误差就会被放大多少倍。
人形机器人做全身避障时,深度不准会导致近处障碍物测距偏近、远处障碍物偏远,要么提前减速影响通行效率,要么来不及避让直接碰撞。
机械臂做三维抓取定位时,深度误差直接决定抓取成功率,几毫米的深度偏差,就会导致吸盘吸空、夹爪夹偏,尤其是小尺寸精密工件,容错空间极低。
三维数据采集做体积测量、三维重建时,深度精度直接决定点云的稠密程度和还原度,标定差的模组,重建出来的模型表面凹凸不平,无法用于工业级尺寸检测。
很多客户选双目模组只看分辨率,不看出厂标定状态,最后自己调了半个月基线,深度精度还是不达标。众鑫创展的双目同步摄像头,出厂前会完成整机立体标定,左右目硬件级同步曝光,从硬件端保证基线精度和同步一致性,客户的项目落地时只需要做简单的现场校准就能直接输出稳定的深度图。
三、相机 - IMU外参标定:动态场景的融合精度核心
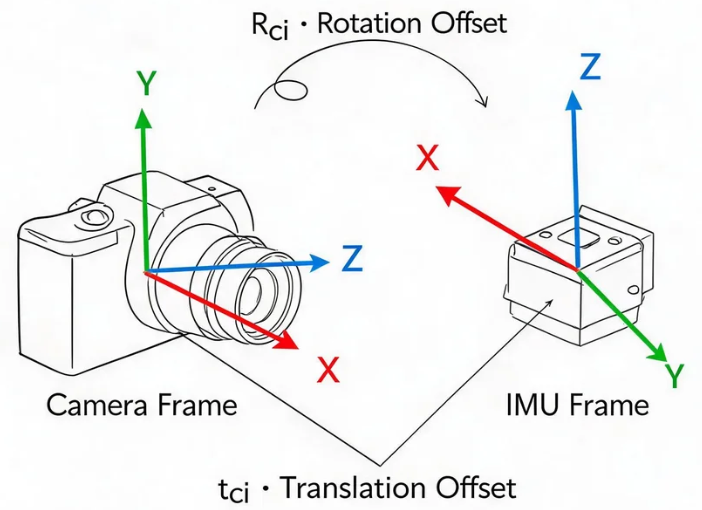
前面两类标定,都还停留在静态视觉的范畴。一旦机器人动起来,就必须引入IMU做运动融合,这时候就绕不开第三类标定——相机与IMU的外参标定。
外参标定解决的是两个核心问题:空间上,相机坐标系和IMU坐标系的位置偏移差;时间上,相机画面帧和 IMU 数据帧的时间同步差。
两个坐标系对不齐、时间戳对不上,视觉数据和运动数据就融不到一起,设备一动起来定位就会飘。这也是很多项目 “静态很准、一动就崩” 的核心原因。
机器狗在高速奔跑、上下台阶时,如果外参标定不准,视觉定位和IMU惯导数据就会错位,机身姿态估计出错,轻则导航漂移偏离路径,重则直接失衡摔倒。
人形机器人动态行走、转向时,相机 - IMU外参偏差会导致SLAM建图持续累积误差,走得越远地图歪得越厉害,最终完全失去自主定位能力。
机械臂做动态跟随抓取、移动平台上的视觉作业时,运动状态下的位置融合会出现偏差,运动速度越快,偏差越大,最后只能停稳了再拍摄检测,动态方案直接退化成静态方案,效率提升无从谈起。
很多人以为外参标定只是 “调个坐标偏移”,实际上空间偏差和时间偏差是叠加放大的。我们常说“空间坐标对不上,融合数据照样飘,高速运动时偏差更大”,就是这个道理。对于移动机器人、机器狗这类高速运动场景,相机 - IMU的外参标定精度,直接决定了动态场景下的视觉系统能不能真正落地。
四、系统外参标定:整机执行的最终精度边界
前三类标定都做好了,视觉系统本身的精度就到位了,但这还不是终点。最后还有一类外参标定,决定了最终的执行精度:相机和执行机构的外参标定,也就是机械臂场景常说的手眼标定、移动机器人场景的机身 - 相机外参标定。
简单说,就是把相机的坐标系和机械臂关节坐标系、机器人机身坐标系完全对齐。相机算出来的坐标再准,如果和执行端的坐标系对不上,最终执行结果还是会偏差。
机械臂的手眼标定,决定视觉定位结果能不能精准对应到机械臂的运动坐标。手眼标定差1mm,末端执行器就会偏1mm,再精准的视觉检测都没有实际意义。
人形机器人、机器狗的机身 - 相机外参,决定了视觉感知到的障碍物位置,能不能准确映射到机身运动坐标系里,标定偏差会导致避障路径规划出错,该躲的躲不开,不该绕的绕远路。
三维数据采集的转台、滑台外参标定,决定了多视角采集的点云能不能精准拼接,拼接误差大的话,整体重建模型直接报废,无法用于检测和逆向建模。
这一层标定和客户的整机结构强相关,大多数的摄像头厂商没法替客户完成,但前三层标定做得越准,这一层的标定难度就越低,最终整机的精度上限也就越高。
总的来说,机器人视觉的精度是一层一层垒起来的。内参决定成像基础精度,双目决定深度测量精度,IMU外参决定动态融合精度,系统外参决定最终执行精度。四类标定环环相扣,任何一个步骤出问题都会拉低整个系统的精度天花板。
如果大家有摄像头选型、硬件搭配、集成调试、样品测试及批量采购等需求,欢迎评论区留言或私信我们交流,竭诚为您提供专业的技术支持与配套服务!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)