【复现】基于反步终端滑模控制的PMSM位置控制器三环伺服系统设计研究附Simulink仿真
·
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、算法改进、程序设计科研仿真。
🍎 往期回顾关注个人主页:完整代码获取 定制创新 论文复现私信
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
一、引言
永磁同步电机(PMSM)因其高效、节能、功率密度大等优点,在工业生产、机器人、航空航天等领域得到广泛应用。精确的位置控制是 PMSM 应用中的关键需求,传统控制方法在面对复杂工况和系统不确定性时,控制性能往往受限。基于反步终端滑模控制的 PMSM 位置控制器三环伺服系统设计,能够有效提升系统的动态性能和鲁棒性。本文将对这一设计进行复现研究。
二、PMSM 数学模型
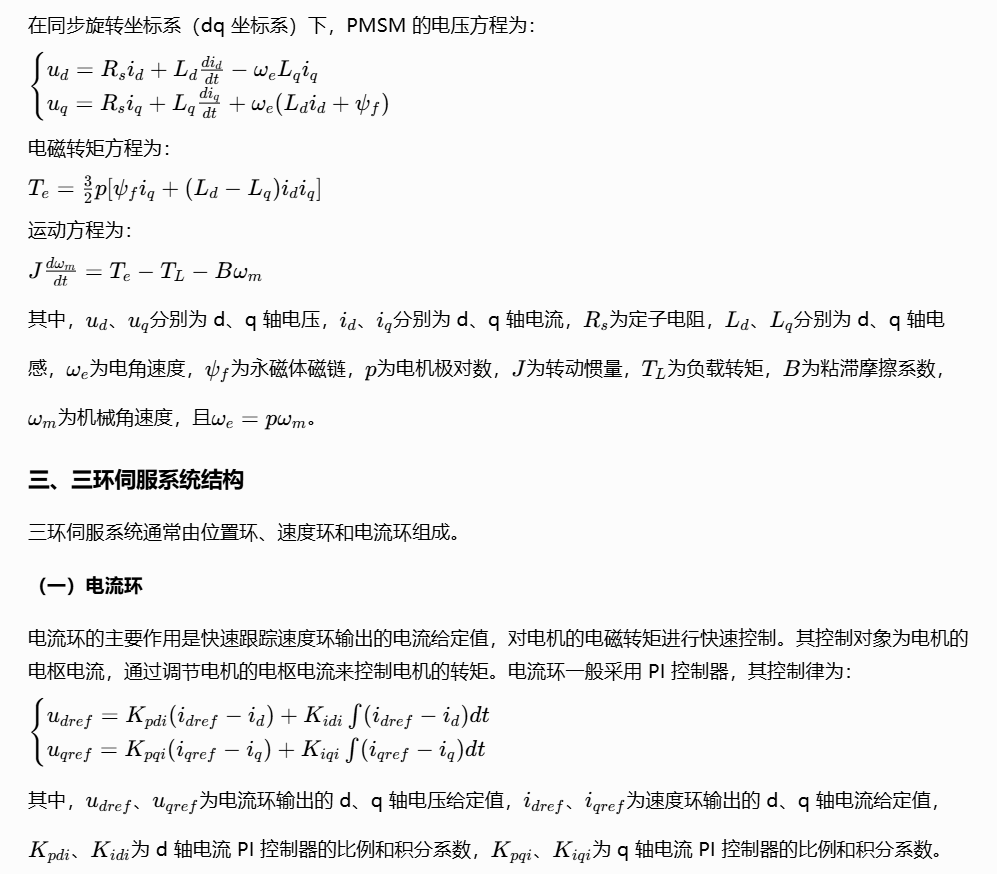
在同步旋转坐标系(dq 坐标系)下,PMSM 的电压方程为:
(二)速度环
速度环用于控制电机的转速,使其能够快速、准确地跟踪位置环输出的速度给定值。速度环的输入为速度给定值与实际转速的差值,经过速度调节器后输出电流给定值,作为电流环的输入。在基于反步终端滑模控制的设计中,速度环采用反步终端滑模控制器。
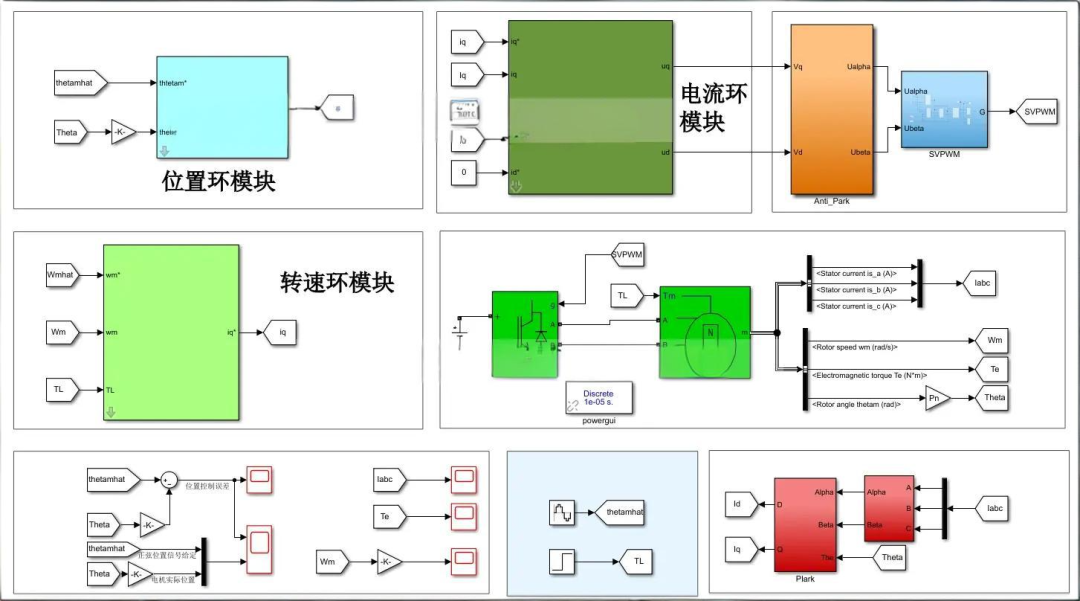
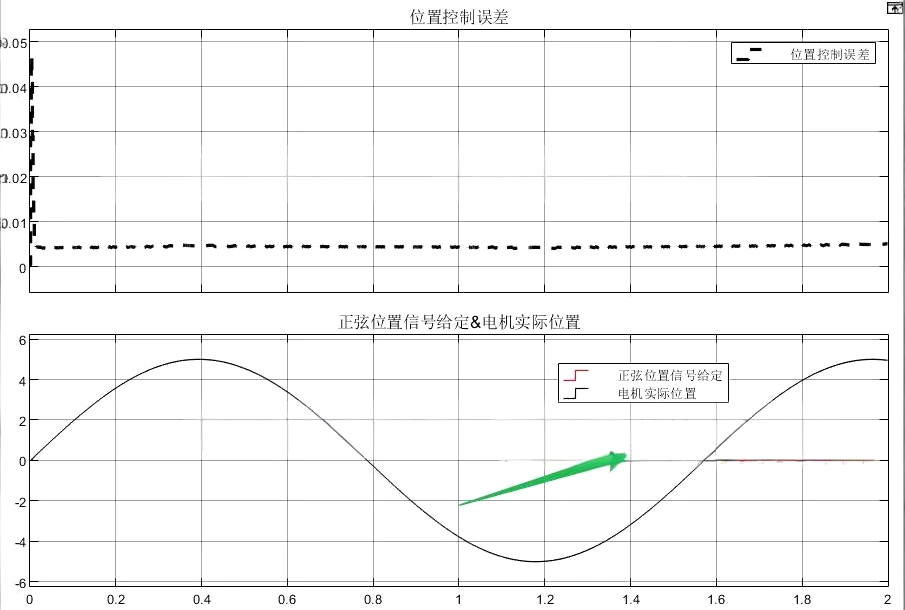
⛳️ 运行结果
🔗 参考文献
[1]方一鸣,李智,吴洋羊,等.基于终端滑模负载观测器的永磁同步电机位置系统反步控制[J].电机与控制学报, 2014, 18(9):7.DOI:10.3969/j.issn.1007-449X.2014.09.017.
🍅更多免费数学建模和仿真教程关注领取

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献349条内容
已为社区贡献349条内容

所有评论(0)