ROS 2 URDF 导入与关节状态发布
·
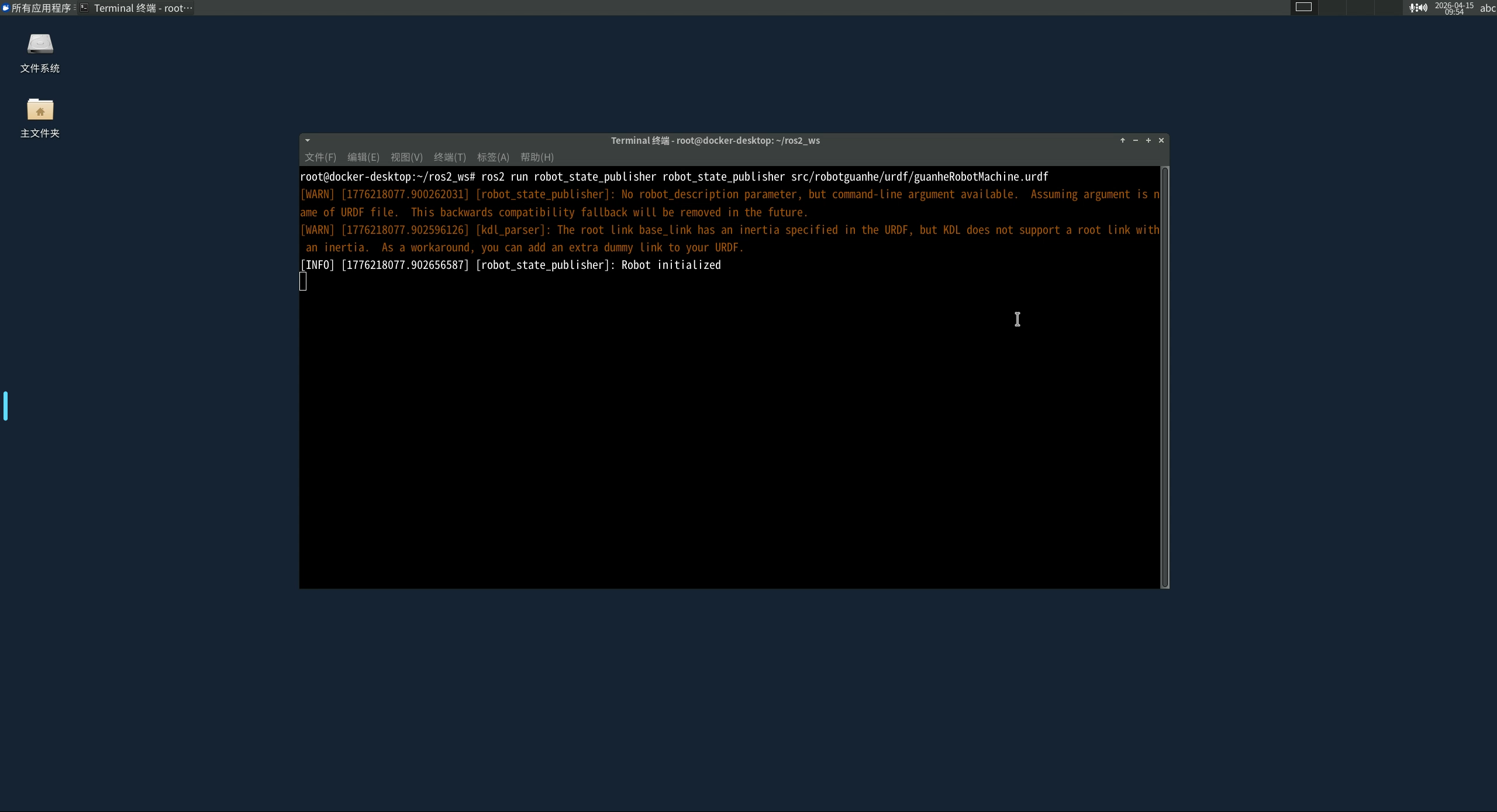
guanheRobotMachine.urdf:传给节点的参数,即机器人描述文件(URDF 格式)
# 进入 URDF 目录,替换为自己路径
cd /root/ros2_ws/src/robotguanhe/urdf/
# 加载指定的机器人 URDF 模型文件
ros2 run robot_state_publisher robot_state_publisher guanheRobotMachine.urdf
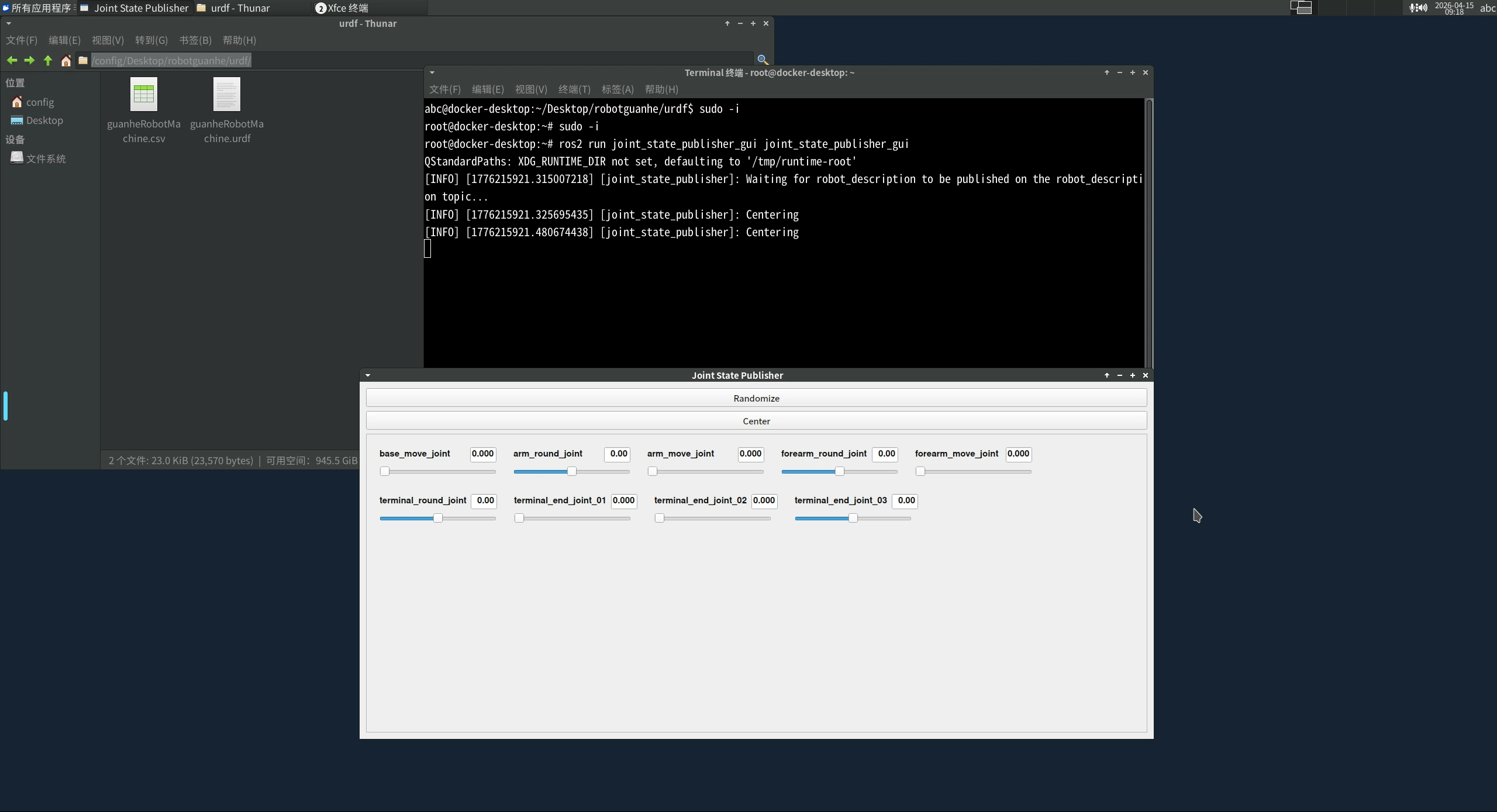
启动图形界面工具,手动模拟和发布机器人的关节角度
作用:提供一个图形界面(滑条窗口),让用户手动调节机器人关节角度,并将这些角度值发布到 /joint_states 话题,供 robot_state_publisher 等节点使用;
ros2 run:运行 ROS2 功能包中的可执行程序
joint_state_publisher_gui:功能包名(提供图形界面版本的关节状态发布器)
joint_state_publisher_gui:可执行文件名(启动一个带滑条窗口的程序)
# 安装 ros-jazzy-joint-state-publisher-gui
sudo apt update
sudo apt install ros-jazzy-joint-state-publisher-gui
# 启动 ros-jazzy-joint-state-publisher-gui
ros2 run joint_state_publisher_gui joint_state_publisher_gui
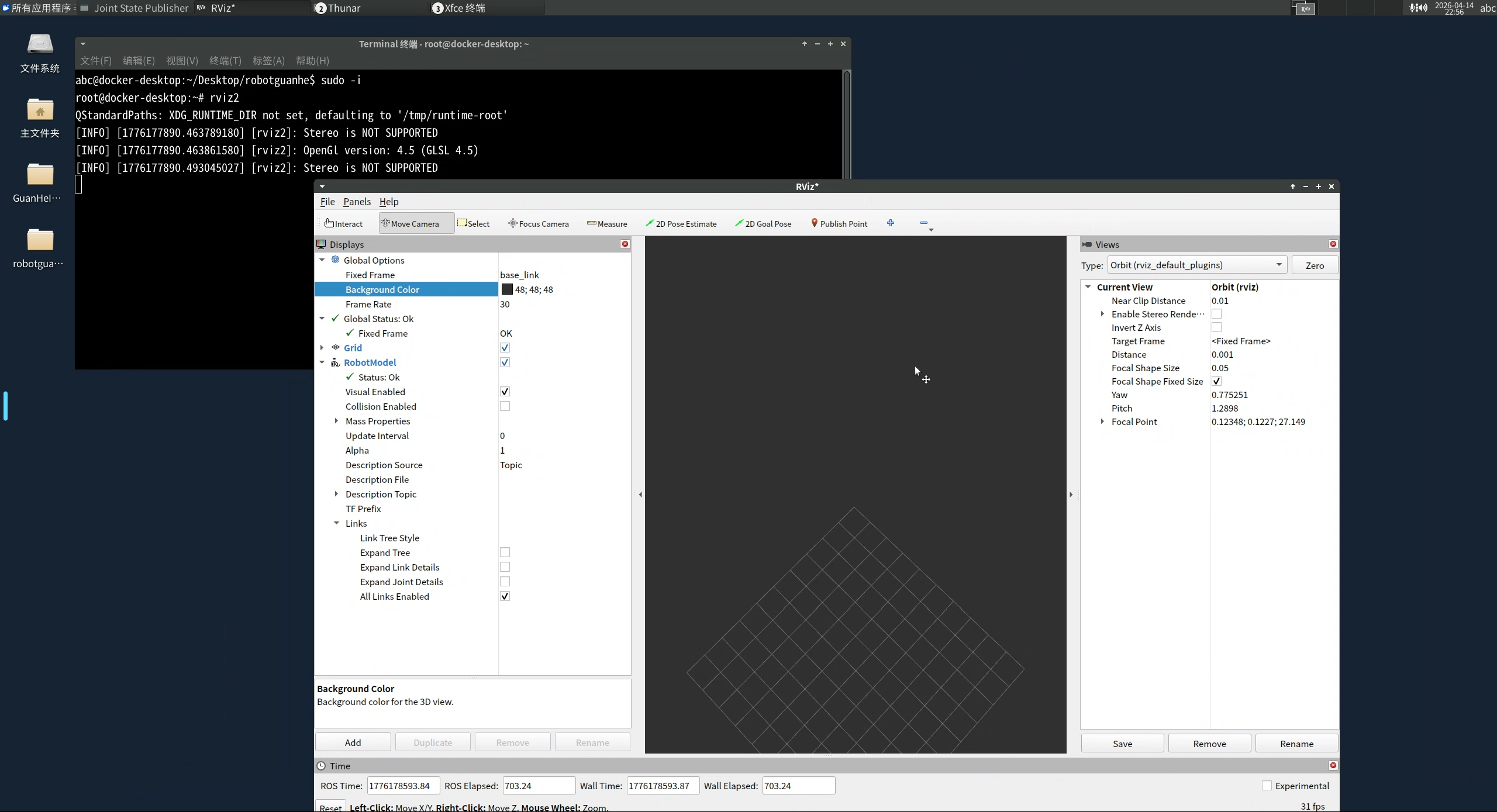
启动三维可视化工具(ROS Visualization)
rviz2 是一个 3D 可视化工具,能订阅 ROS2 中的各种话题(TF、点云、图像、地图、路径等),将机器人的物理形态、传感器数据、运动状态和规划结果以图形化的方式实时展示出来,帮助开发者调试和观察机器人行为;
注:先启动 robot_state_publisher 加载 URDF,再打开 rviz2 → 点击 Add 添加 RobotModel → 将 Fixed Frame 设为 base_link(根坐标系),即可看到机器人模型;
ros2 run rviz2 rviz2
# 添加 RobotModel 显示项
# 1、点击 rviz2 左侧面板底部的 Add 按钮(弹出添加显示项的窗口)=>
# 2、选择 By display type 选项卡(按类型浏览)=>
# 3、找到并选中 RobotModel(机器人模型显示插件),并点击 OK 确认
# 设置 Fixed Frame(固定坐标系)
# 1、左侧 Global Options 区域 =>
# 2、找到 Fixed Frame 参数 =>
# 3、改为机器人根坐标系名称(通常是 base_link 或 base_footprint,基于URDF文件)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)