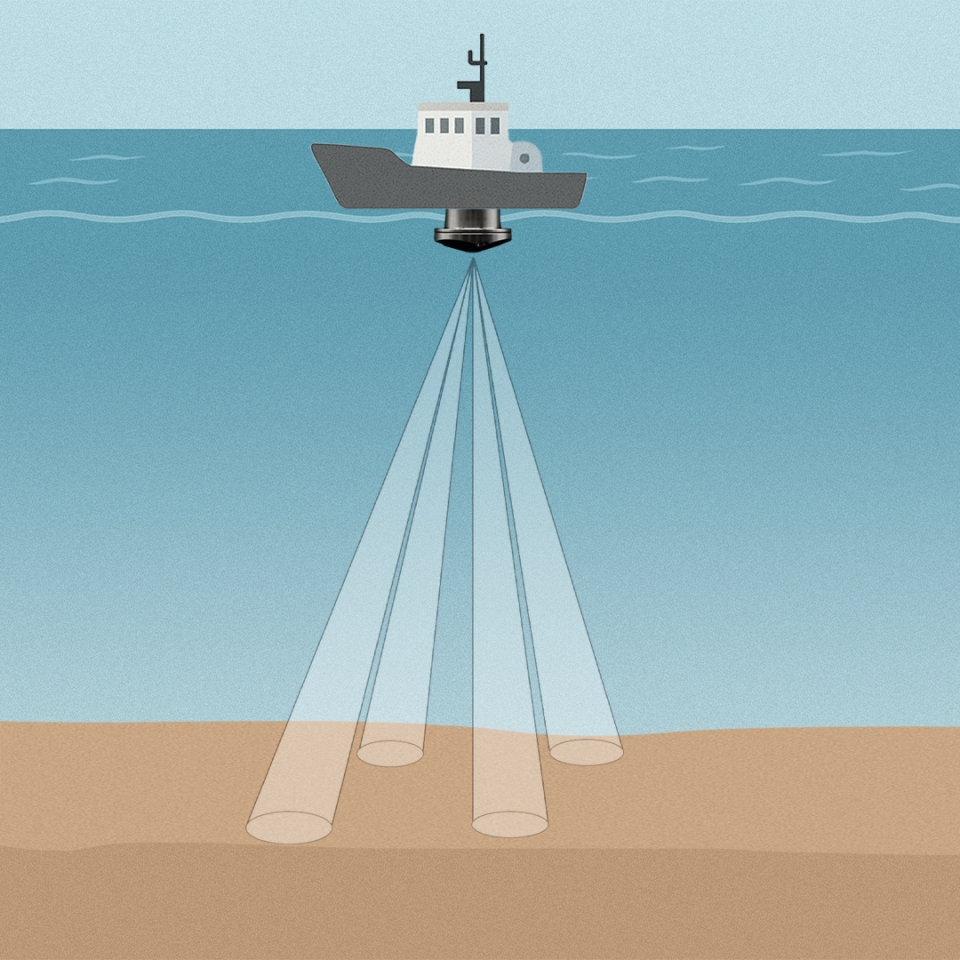
水下机器人海洋环境测速选啥?偶信DVL 600K适配各类水下作业工况吗?
在海洋探索与水下工程作业向纵深推进的当下,水下机器人已成为海底管线巡检、港口坝体检测、近岸测绘等任务的核心载体。然而,复杂海洋环境中高含沙、强湍流、近底作业等挑战,让水下机器人常陷入“测速失准、导航迷航”的困境。
面对这一难题,偶信科技推出的DVL 600K系列多普勒计程仪引发行业关注——它究竟能否成为复杂工况下的测速优选?又是否适配各类水下作业场景?本文将结合技术架构与实地表现,揭开答案。
一、复杂海洋环境测速,为何多普勒计程仪是刚需?
水下机器人无法依赖卫星定位,惯性导航的误差会随时间快速累积,唯有通过多普勒计程仪(DVL)测量对地速度,才能实现精准定位修正。但复杂海洋环境的严苛性,对DVL提出了远超常规的要求:近底作业时,传统设备因起测高度高,易在贴近海床时失锁;高含沙水域中,气泡与泥沙散射会干扰声波信号,导致数据跳变;中小型水下机器人载荷有限,笨重设备还会破坏浮力平衡。这些痛点,让进口设备常因“水土不服”陷入适配困境,而国产设备能否突破技术壁垒,成为破局关键。
二、偶信科技DVL 600K,如何筑牢测速硬件根基?
偶信科技DVL 600K系列包含DVL-600-DR-FA4四波束Janus款与DVL-600-PA5相控阵款,两款产品以差异化硬件设计,精准匹配不同作业载体需求。DVL-600-DR-FA4采用20°窄波束角的对称四波束Janus结构,能集中声能,大幅削弱水体气泡、悬浮泥沙的散射干扰;而DVL-600-PA5搭载平面相控阵一体化换能器,单端面集成发射接收单元,波束宽度仅3.5°,能量聚焦效果更优,且机身尺寸仅为Φ92×112mm,空气中自重≤1.8kg,完美适配轻量化小型AUV。
更关键的是,该系列最低起测高度仅0.7米,标准底跟踪量程覆盖0.7-110米,既满足水下机器人贴底开展管线、坝体精细化巡检的需求,又兼顾浅滩与近海中等水深作业,从硬件源头降低了底跟踪断联风险,为复杂环境下的稳定测速打下基础。

三、面对干扰与杂波,偶信科技DVL 600K有何抗干扰绝招?
复杂海洋环境中,杂波干扰是导致测速失准的核心诱因,偶信科技DVL 600K凭借自研算法体系破解这一难题。以DVL-600-DR-FA4为例,其搭载自适应增益调节与AI智能杂波过滤双算法:设备实时采集回波信噪比,动态调整声波发射功率与接收增益,面对淤泥等弱反射海底时,自动提升信号强度。
实测数据印证了算法实力:在含沙量30kg/m³的浑浊河道中,DVL 600K底跟踪数据有效率稳定高于95%,无频繁跳变、断档现象;即便在四级海况下载体持续摇摆,设备仍能稳定输出对地速度,大幅提升复杂工况下的导航可靠性。
四、复杂实地工况下,偶信科技DVL 600K的稳定性经得起考验吗?
一款设备是否适配,实地工况的检验最具说服力。偶信科技DVL 600K已完成上百次实地测试,在多类复杂场景中展现出强适配性:在长江内河高泥沙航道巡检任务中,全程底跟踪无一次失锁,测速精度维持±0.3%±3mm/s;在南海近岸淤泥质海域开展海底管线探测时,即便遭遇四级海况的载体摇摆,设备依旧稳定输出数据;针对水库坝体水下检测场景,水体能见度不足0.5米,普通DVL每隔数分钟就会丢失底跟踪,而DVL 600K可全程连续测速,大幅减少惯性导航累积误差,降低管线裂缝、坝体缺陷的漏检率。
对比同规格进口600K DVL,在软泥底质的浅水场景中,偶信DVL 600K底跟踪连续工作时长提升30%以上,彻底规避了进口设备在内陆浑浊水域频繁失锁的短板,更贴合国内水文与近海复杂工况。

结语:
综合来看,面对复杂海洋环境的测速需求,偶信科技DVL 600K凭借硬件架构创新、算法抗干扰设计、实地工况验证与全场景适配能力,不仅解决了传统测速设备的痛点,更以国产化方案实现了对进口产品的超越。
无论是中小型水下机器人的轻量化集成,还是近岸、内河的复杂工况作业,DVL 600K都能以稳定可靠的表现,成为水下导航的核心支撑,为我国水下作业装备的国产化升级与海洋事业发展注入强劲动力。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)