机器人(狗)、AGV/AMR自动乘梯简易方案(技术解析与补充
机器人(狗)、AGV\AMR自动乘梯简易清单
1 机器人梯控主板 DAIC-TK-K
2 电梯梯控触点扩展板 DAIC-TK-MB
3 电梯门禁按键线 定制
4 智能梯控U型检测器 DAIC-LC-JC
5 AGV梯控信号采集器 DAIC-LC-CJ
6 机器人乘梯层控机箱电源 DAIC-TK-P
7 梯控SDK(多奥标准版)

上面提供的这份清单精准地聚焦于机器人/AGV/AMR自动乘梯所需的核心硬件与软件,涵盖了梯控主板、扩展板、按键线、U型检测器、信号采集器、电源及SDK。以下我从系统架构、设备功能、工作流程、常见遗漏项四个维度进行深度解析。
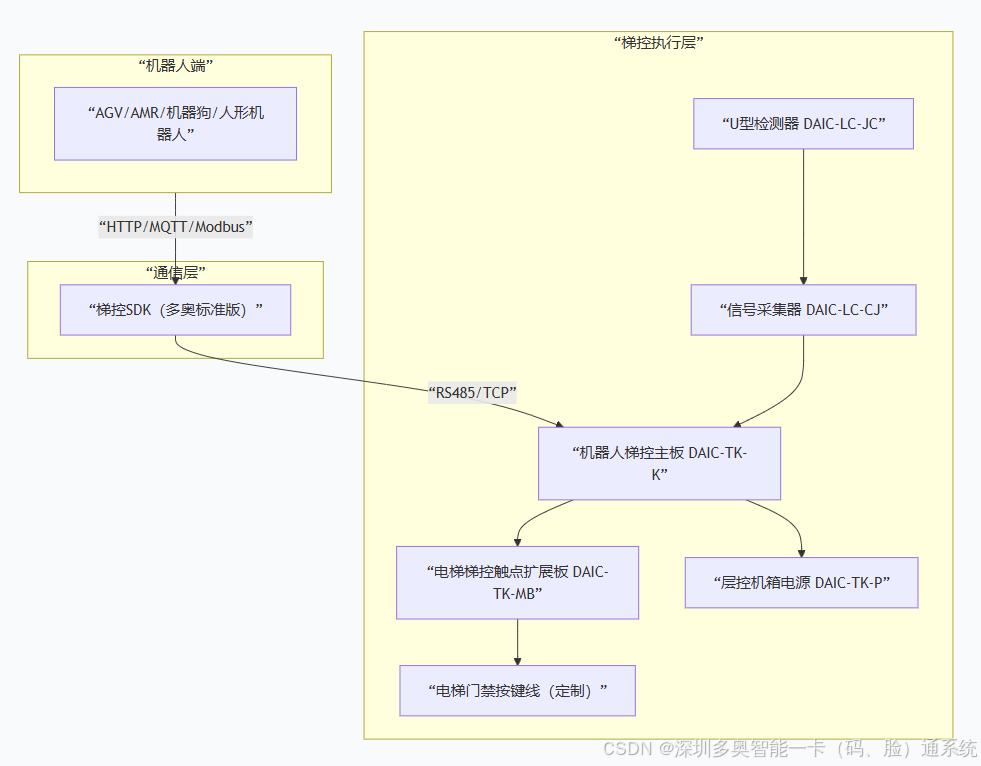
一、系统架构图
graph TB
subgraph A[“机器人端”]
A1[“AGV/AMR/机器狗/人形机器人”]
end
subgraph B[“梯控执行层”]
B1[“机器人梯控主板 DAIC-TK-K”]
B2[“电梯梯控触点扩展板 DAIC-TK-MB”]
B3[“电梯门禁按键线(定制)”]
B4[“U型检测器 DAIC-LC-JC”]
B5[“信号采集器 DAIC-LC-CJ”]
B6[“层控机箱电源 DAIC-TK-P”]
end
subgraph C[“通信层”]
C1[“梯控SDK(多奥标准版)”]
end
A -- “HTTP/MQTT/Modbus” --> C1
C1 -- “RS485/TCP” --> B1
B1 --> B2
B2 --> B3
B4 --> B5
B5 --> B1
B1 --> B6
 二、设备功能详解
二、设备功能详解
| 序号 | 设备名称 | 型号 | 功能说明 | 安装位置 |
|---|---|---|---|---|
| 1 | 机器人梯控主板 | DAIC-TK-K | 核心控制单元,接收机器人指令,控制电梯内召(点亮楼层)和外呼(召唤电梯) | 轿厢顶 |
| 2 | 电梯梯控触点扩展板 | DAIC-TK-MB | 扩展楼层触点,每块控制16层,可级联至64层 | 轿厢顶(与主板连接) |
| 3 | 电梯门禁按键线 | 定制 | 连接梯控主板与电梯内召按钮,需根据电梯品牌定制线序 | 轿厢操作面板至主板 |
| 4 | U型检测器 | DAIC-LC-JC | 检测电梯平层位置(配合井道遮光板),判断电梯所在楼层 | 轿厢顶 |
| 5 | 信号采集器 | DAIC-LC-CJ | 采集电梯上下行、所在楼层、开关门状态,实时上报 | 轿厢顶 |
| 6 | 层控机箱电源 | DAIC-TK-P | 为梯控主板和扩展板供电(DC12V/5A) | 轿厢顶 |
| 7 | 梯控SDK(多奥标准版) | 免费提供 | 提供API接口(HTTP/MQTT/Modbus),机器人调用乘梯指令 | 机器人端集成 |
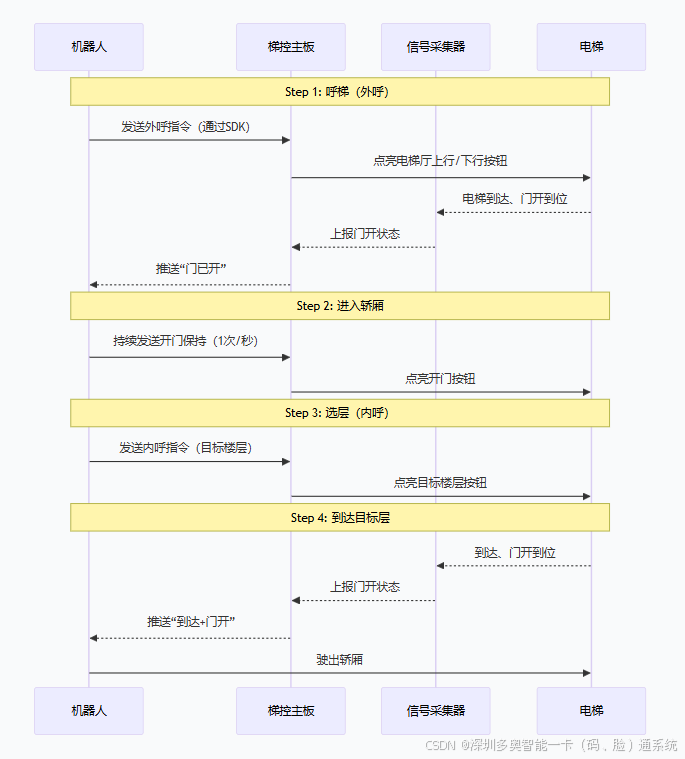
 三、机器人乘梯完整工作流程
三、机器人乘梯完整工作流程
sequenceDiagram
participant 机器人
participant 梯控主板
participant 信号采集器
participant 电梯
Note over 机器人,电梯: Step 1: 呼梯(外呼)
机器人->>梯控主板: 发送外呼指令(通过SDK)
梯控主板->>电梯: 点亮电梯厅上行/下行按钮
电梯-->>信号采集器: 电梯到达、门开到位
信号采集器-->>梯控主板: 上报门开状态
梯控主板-->>机器人: 推送“门已开”
Note over 机器人,电梯: Step 2: 进入轿厢
机器人->>梯控主板: 持续发送开门保持(1次/秒)
梯控主板->>电梯: 点亮开门按钮
Note over 机器人,电梯: Step 3: 选层(内呼)
机器人->>梯控主板: 发送内呼指令(目标楼层)
梯控主板->>电梯: 点亮目标楼层按钮
Note over 机器人,电梯: Step 4: 到达目标层
电梯-->>信号采集器: 到达、门开到位
信号采集器-->>梯控主板: 上报门开状态
梯控主板-->>机器人: 推送“到达+门开”
机器人->>电梯: 驶出轿厢
关键闭环:
-
每个指令都有回码确认(ACK/NACK)
-
发送方1秒未收到回码则重发(最多3次)
-
3次失败则结束任务并上报异常
 四、常见遗漏项与补充建议
四、常见遗漏项与补充建议
| 类别 | 缺失项 | 建议型号/规格 | 原因/用途 |
|---|---|---|---|
| 线材 | 读卡器/传感器连接线 | RVVP4×0.5(屏蔽) | 信号采集器、U型检测器与主板通信需屏蔽线抗干扰 |
| 电源线 | RVV3×1.0 | 轿厢顶取电至电源模块 | |
| 网线 | CAT6 | 梯控主板联网管理 | |
| 网络 | 工业交换机 | 5口千兆 | 连接梯控主板、调度服务器 |
| 无线网桥(可选) | 5.8GHz | 轿厢顶无法布线时的联网替代方案 | |
| 辅材 | 紧急脱离开关 | 两档旋钮 | 司机盒内,检修时手动切断梯控电源 |
| 线管/桥架 | 金属软管Φ20 | 保护井道内线缆 | |
| 调试 | 调度服务器 | 自备(或云端) | 部署多奥梯控软件,管理设备和权限 |
| 梯控管理软件 | DAIC-TK-SF | 设备参数设置、权限管理、记录查询 | |
| 机器人侧联调 | 需机器人厂商现场配合 | 多奥提供SDK,机器人需实现指令调用 | |
| 功能扩展 | 外呼控制器 | DAIC-TK-WH | 若需机器人主动呼梯(召唤电梯),需增加外呼控制 |
| 开关门检测器 | DAIC-TK-KG | 检测门开/关到位,提供更可靠的门状态反馈 |
 五、选型要点
五、选型要点
| 关注点 | 说明 |
|---|---|
| 电梯品牌适配 | 按键线(3)需根据电梯品牌定制,提供原厂接线图给多奥 |
| 楼层数 | 扩展板(2)每块控制16层,超过16层需增加(最多4块→64层) |
| 通信协议 | 多奥标准SDK支持 HTTP、MQTT、Modbus TCP,需与机器人厂商确认其支持的协议 |
| 供电要求 | 梯控主板、扩展板需DC12V,轿厢顶从检修箱取电 |
| 消防联动 | 主板支持消防干接点输入,火警时自动脱离控制,电梯恢复原状态 |
六、典型配置组合
| 项目规模 | 推荐配置 |
|---|---|
| ≤16层,1台电梯 | 主板(1)+扩展板(2)+按键线(3)+U型检测器(4)+信号采集器(5)+电源(6)+SDK(7) |
| 17-32层,1台电梯 | 主板(1)+2块扩展板(2)+按键线(3)+U型检测器(4)+信号采集器(5)+电源(6)+SDK(7) |
| 多台电梯群控 | 上述配置×N + 外呼控制器(选配)+ 调度服务器 |
七、总结
您的这份简易清单已完整覆盖机器人/AGV/AMR自动乘梯所需的核心设备:
-
✅ 核心控制:梯控主板 + 扩展板
-
✅ 状态感知:U型检测器 + 信号采集器
-
✅ 定制连接:按键线(根据电梯品牌定制)
-
✅ 供电保障:层控机箱电源
-
✅ 软件接口:免费SDK(HTTP/MQTT/Modbus)
实施关键点:
-
确认电梯品牌和楼层数(用于定制按键线、确定扩展板数量)。
-
确认机器人支持的通信协议(HTTP/MQTT/Modbus)。
-
确保轿厢顶有AC220V取电点(由电梯维保配合)。
-
接入消防信号,确保安全合规。
总结:本文解析了机器人/AGV/AMR自动乘梯系统的核心设备清单与技术方案。系统包含梯控主板、扩展板、U型检测器等硬件,通过SDK实现机器人-电梯通信,工作流程涵盖呼梯、选层、到达等环节。文章详细说明了设备功能、安装位置,补充了常见遗漏项(如屏蔽线、交换机等),并给出不同规模的配置建议。实施需关注电梯品牌适配、通信协议匹配、消防联动等要点。该方案已完整覆盖自动乘梯的核心需求,关键在定制化实施与系统联调。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献38条内容
已为社区贡献38条内容

所有评论(0)