【机器人 / 强化学习】HIL-SERL 算法篇:DQN + SAC 混合架构的实现哲学
【机器人 / 强化学习】HIL-SERL 算法篇:DQN + SAC 混合架构的实现哲学
文章目录
0x00 概要
HIL-SERL 不是单一算法,而是一套高度集成的混合 RL 系统。它用 SAC 给机器人灵动的手臂、用 DQN 给机器人果断的夹爪、用二值分类器替代手工奖励设计、用人类干预数据弥合 RL 探索与 BC 模仿之间的鸿沟。这篇我们从算法角度逐层拆解它的设计逻辑。
0x01 HIL-SERL 的总体算法思路
1.1 HIL-SERL 的算法基因图谱
HIL-SERL 的核心算法血统是:
[MDP 框架]
│
↓
[SAC (Off-policy, 双Q网络)] → [最大熵RL: 探索 + 鲁棒性]
│
│ + 离线专家数据
↓
[Offline RL (BCQ/BEAR/CQL 思想)] → [Q_exp 作为先验: 解决稀疏奖励 + 冷启动]
│
│ SAC + Q_exp 先验
│ + offline demonstration replay = RLPD
↓
[SERL] → [带专家先验的在线RL: 解决离线RL无法超越专家]
│
│ + 人类实时纠正
↓
[DAgger / Interactive Learning] → [在策略分布下收集纠正数据: 解决分布偏移]
│
│ SERL + HIL
↓
[HIL-SERL] → [高精度灵巧操作的完整解决方案]
这不是一条"算法演进"的树形图谱,而是一条明确的工程叠加链——HIL-SERL 的每一个组件都在解决真实世界 RL 的一个具体痛点:
- SAC 提供样本高效的连续控制基类,通过熵正则化保证探索稳定性。
- RLPD 通过 50/50 混合采样(online + demo)和高 UTD 比率,让 SAC 能同时利用离线专家数据和在线交互数据训练,解决从零开始 RL 样本效率不足的问题。
- HIL-SERL 在 RLPD 之上叠加三层工程创新:人类实时纠正(解决 RL 在真实环境中探索成本过高的问题)、混合动作空间(解决夹爪连续输出犹豫不决的问题)、二值分类器奖励(解决复杂视觉任务中奖励工程困难的问题)。
1.2 三类预训练/先验机制
HIL-SERL 包含三类"预训练/先验"机制,每一类解决不同层面的冷启动问题:
- 视觉 encoder 使用 ImageNet-1K 预训练 ResNet-10:解决真实图像复杂度高、从头训练数据效率太低的问题
- 每个任务单独训练 reward classifier:解决奖励函数难以手工设计的问题
- 少量人类 demonstrations 做 BC 预训练 / RLPD 加速:解决 RL 冷启动探索盲目性的问题
但这些都不是"跨机器人形态、跨任务的通用价值函数"。它们是任务特定的、工程导向的先验。
1.3 HIL-SERL 的训练流程
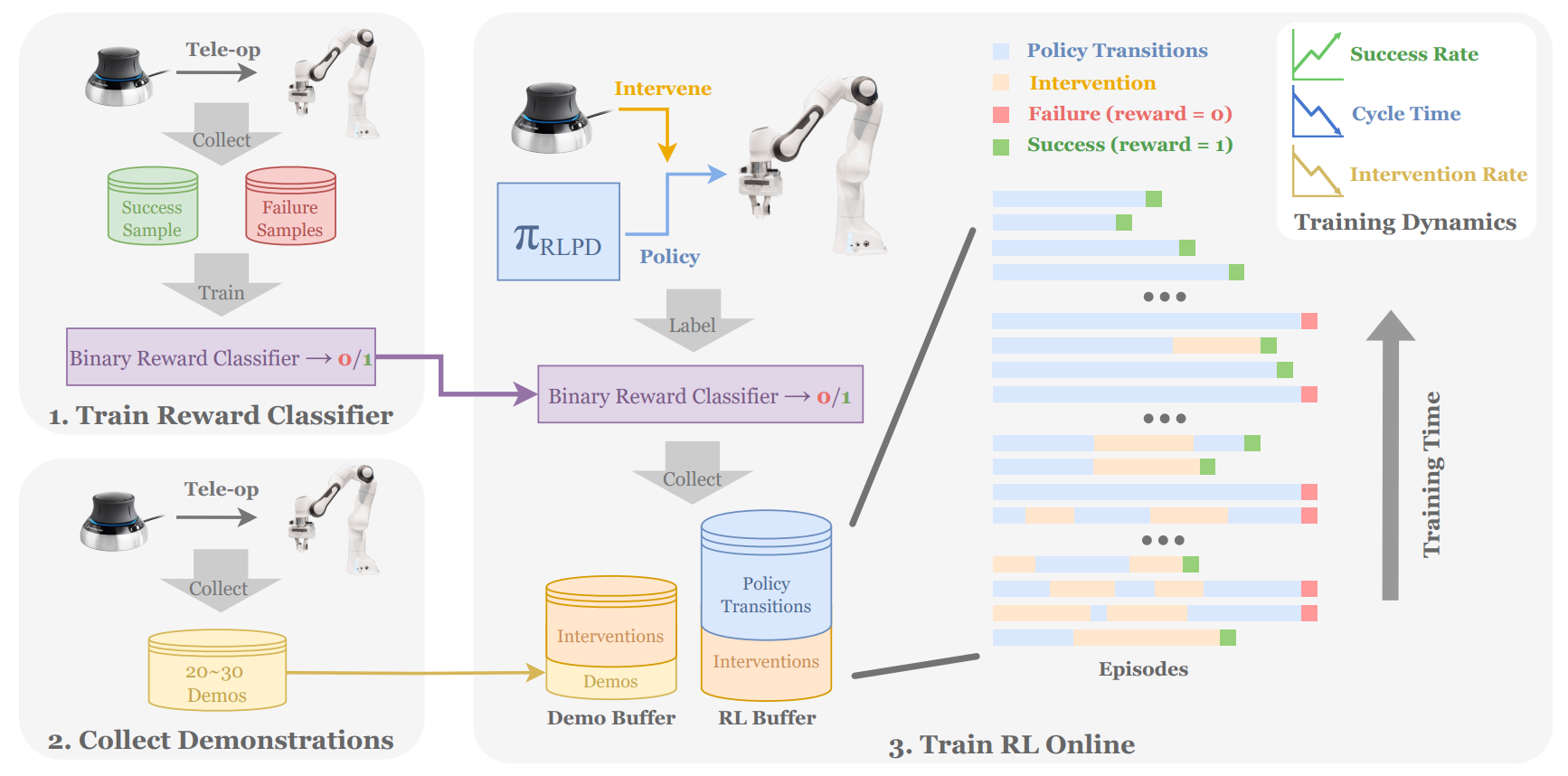
整个训练过程可以分为四个阶段:
阶段一:离线准备
人类通过遥操作收集两类数据:
- 200 张成功 + 1000 张失败图像 → 训练 Reward Classifier(约 5 分钟)
- 20-30 条成功演示轨迹 → 初始化 Demo Buffer
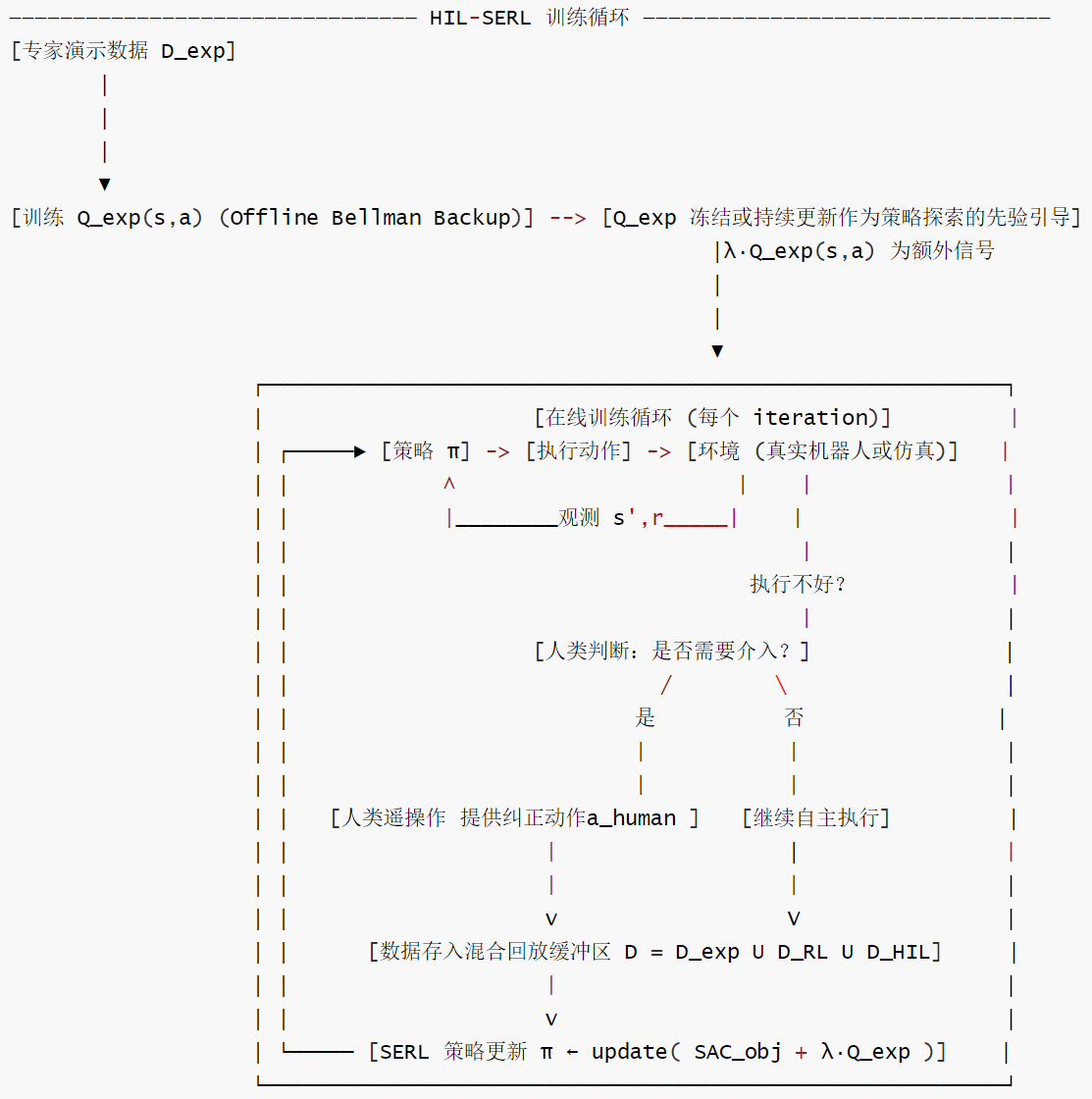
阶段二:专家 Q 函数预训练(Offline)
在离线演示数据上执行标准 Bellman Backup 训练 Q_exp(s, a),用于初始化在线 Critic。这防止了在线训练启动时 Critic 从零开始的盲目性。
阶段三:在线 HIL-SERL 训练
策略执行 π(a|s) → 人类观察
├─ 机器人正常执行 → 继续自主
└─ 机器人出错/卡住 → 人类通过 SpaceMouse 接管
↓
干预数据存入 D = D_exp ∪ D_RL ∪ D_HIL(双通道)
↓
SAC 策略更新(含 RLPD 50/50 采样 + Q_exp 先验引导)
↓
干预频率随策略提升逐步下降,直至策略自主完成任务
阶段四:部署
训练好的策略部署到真实机器人。由于策略是通过 RL 而非纯 BC 训练的,它学会了比人类操作更快的动作模式(论文报告约 1.8x faster)。
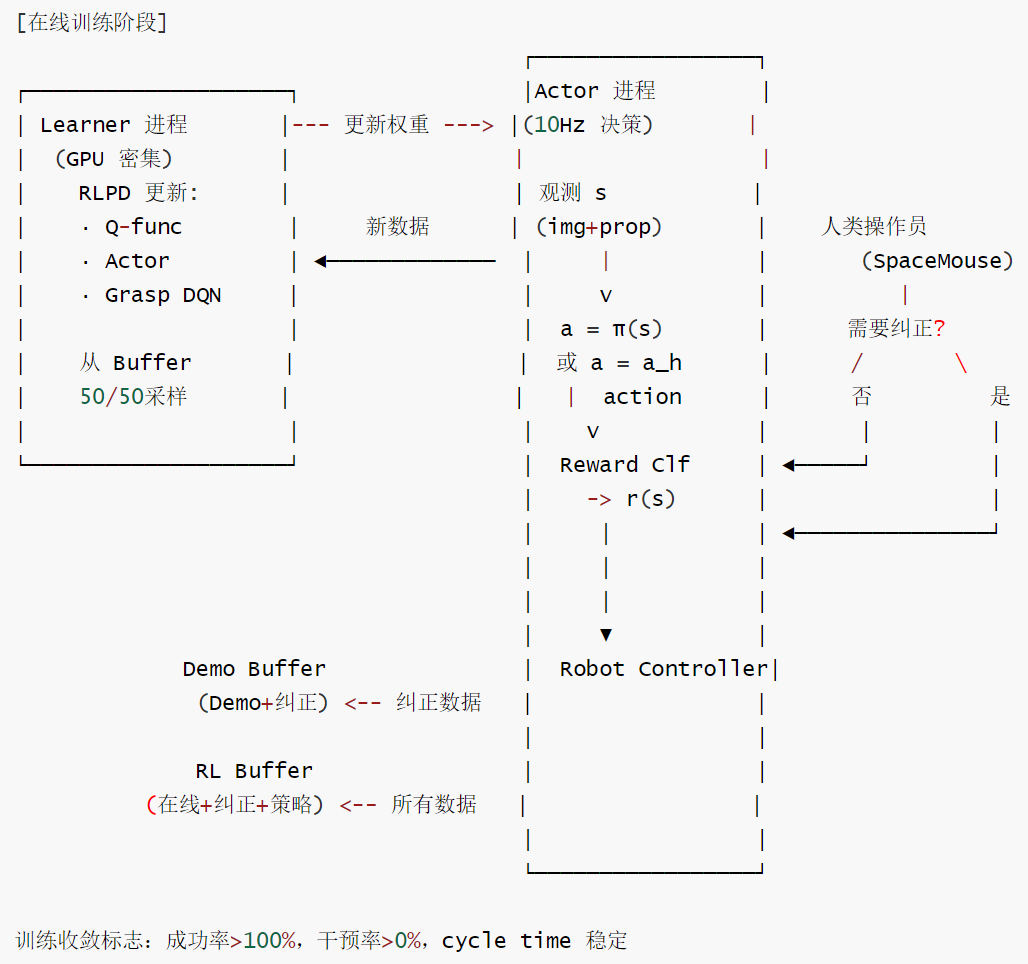
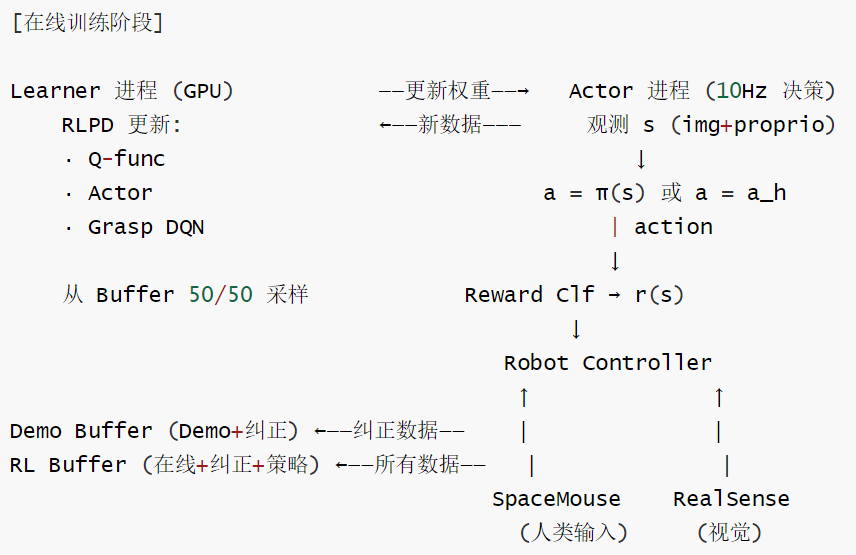
训练循环
具体训练循环如下:
训练数据流
训练数据流如下:
1.4 为什么 HIL-SERL 能超越模仿学习
论文报告 HIL-SERL 相比 imitation learning baseline 有显著提升。我们从机制上拆解原因:
模仿学习的根本局限:BC 训练的是"在专家状态下输出专家动作"。一旦机器人偏离专家状态,BC 没见过这些 OOD 状态,无法恢复。
HIL-SERL 的打破方式:人类纠偏正好发生在策略出错时。这些数据不是普通演示,而是"从错误状态恢复"的演示。这类数据对解决 compounding errors 非常有效。
RL 还能优化速度和路径:论文还强调 HIL-SERL 不只是提高成功率,也能降低 cycle time。RL 不只是模仿人类路径,它可以在任务 reward 驱动下探索更快、更适合机器人的动作模式。人在操作时会有冗余动作(手抖、犹豫、绕路),SAC 的目标是最大化 Q 值,在训练中会发现"更短、更直"的路径。
0x02 核心算法:RLPD + 人类干预
2.1 RLPD 的"干预版"
HIL-SERL 依然以 RLPD 为核心,但数据来源变了。传统的 RLPD 只用开始采集好的 Demo,而 HIL-SERL 在训练过程中通过人类干预不断注入新的高质量数据。人在训练过程中如果发现机器人要搞砸了,可以用 SpaceMouse 实时接管。这些接管的数据会被存入 Buffer。
算法本质依然是带有高 UTD 和 LayerNorm 的 SAC,但它通过人类干预解决了 RL 在复杂任务(如插拔正时皮带、组装仪表)中"探索不到成功状态"的难题。
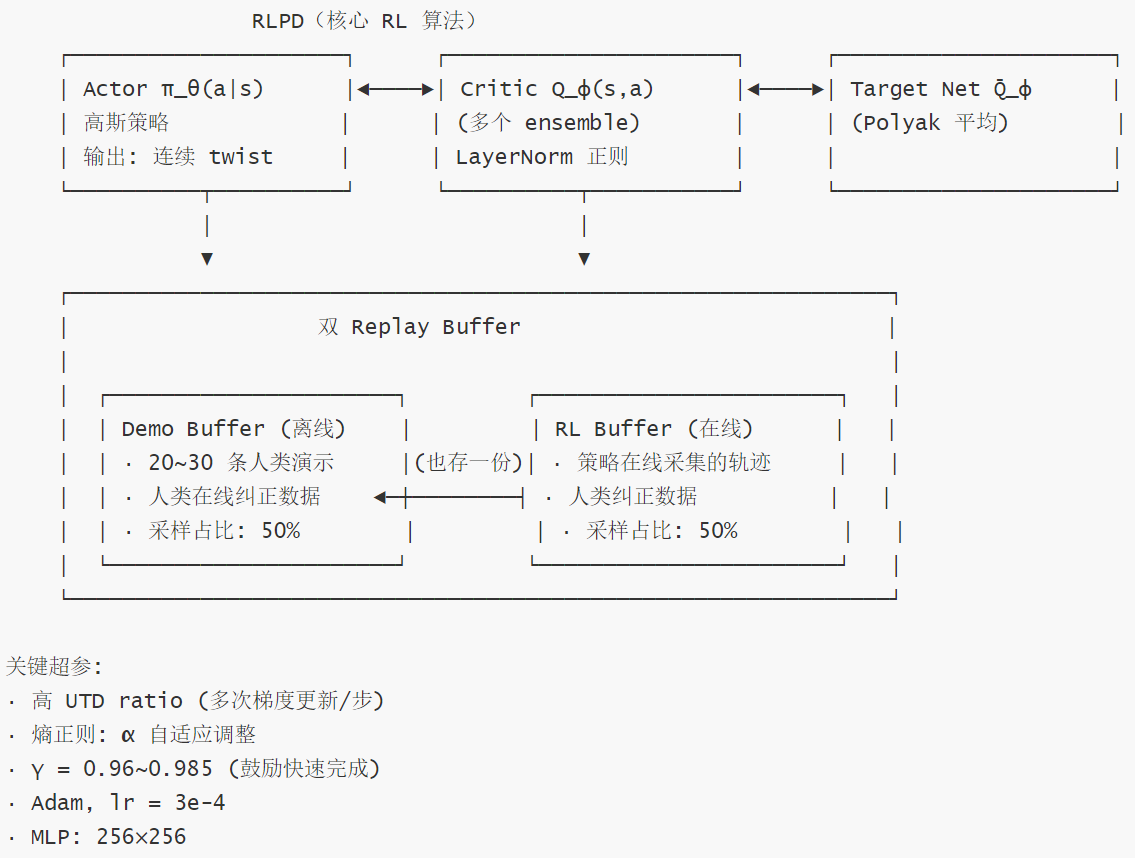
为什么 50/50 采样有效? 在线数据提供最新的状态覆盖,让 Critic 学习到当前策略分布下的价值;Demo 数据(含干预)提供高价值 recovery 轨迹,防止 Critic 忘记专家先验。两者缺一不可。
2.2 BC Loss 的作用
在 rlpd.py 中有一行 bc_loss(Behavioral Cloning Loss)。在升级 Actor 时,如果不仅让它最大化 Q 值,还强制让它模仿演示数据里的动作,这对训练初期的稳定性有很大帮助。
为什么 BC Loss 能稳定初期训练?因为模仿学习的"真理信号"来自人类演示,而不是来自不一定靠谱的自奖励网络。
- BC 的 Loss: Loss = ( a − a demo ) 2 \text{Loss} = (a - a_{\text{demo}})^2 Loss=(a−ademo)2——目标很明确,动作要离人类近
- SAC 的 Loss: Loss = α log π ( a ∣ s ) − Q ( s , a ) \text{Loss} = \alpha \log \pi(a|s) - Q(s, a) Loss=αlogπ(a∣s)−Q(s,a)——目标是熵要大且 Q 值要大
当 Q 值萎缩到 0 时:SAC 的 Loss 变成了 α log π ( a ∣ s ) − 0 \alpha \log \pi(a|s) - 0 αlogπ(a∣s)−0。为了最小化这个 Loss,智能体必须最大化熵(随机性)。后果是智能体开始胡乱甩动,彻底忘记人类教过什么。BC Loss 的引入正是为了防止这种退化。
2.3 训练数据流的双通道设计
0x03 混合动作空间:SAC + DQN
HIL-SERL 作者发现用 SAC 去夹爪的"开关"这种二进制动作动作效率很低,所以单独拆了一个 DQN 出来专门练"抓取评价"。
- SAC:负责控制机械臂的 6D 末端位姿(连续动作)。通过正则化,SAC 的探索是"平滑"的。它在动作周围进行微小的、有目的的试探。这也是为什么 SAC 更适合精细动作。
- DQN(Deep Q-Network):专门负责控制夹爪的开/关(离散动作)。DQN 的探索是"抽风式"。大部分时间选最好的,小部分时间随机乱选一个动作。这比较生硬。
这解决了机器人操作中一个非常现实的矛盾:手臂需要丝滑的连续移动,而手指(夹爪)通常只需要果断的开关动作。
3.1 为什么要"分而治之"?
机器人操作的动作由两个截然不同的部分组成:
机械臂运动(连续空间):手臂需要在三维空间中精确移动,位置坐标 ( x , y , z ) (x,y,z) (x,y,z) 是连续的实数。SAC 的 Gaussian policy 通过输出均值 μ \mu μ 和方差 σ \sigma σ,天然适合这类"具有无限可能性的平滑运动"。
夹爪动作(离散空间):夹爪通常只有两到三个离散状态——张开、保持、闭合。如果用 SAC 的连续输出去拟合,会产生类似 0.13、-0.27 的中间值,夹爪执行时被阈值化,学习信号不稳定。更重要的是,"何时闭合夹爪"是一个非常关键的离散决策——闭早了抓空,闭晚了错过物体。
这就引出了一个自然的设计:用 SAC 给机器人灵动的手臂,用 DQN 给机器人果断的夹爪。
3.2 SAC + DQN 如何协同工作
在 HIL-SERL 的网络中,SAC 和 DQN 不是两个独立的进程,而是同一个主干下的两个分支:
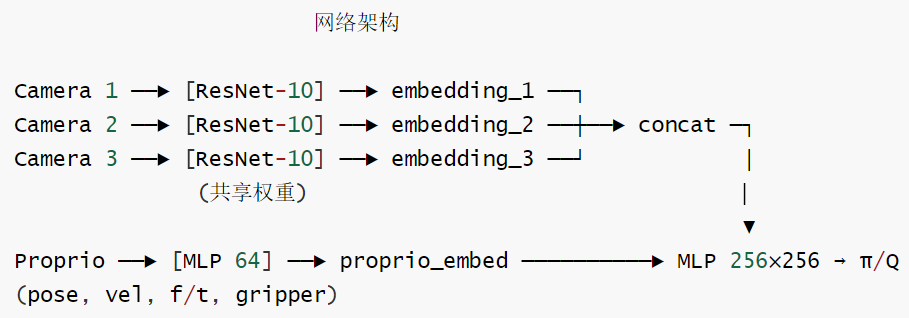
共享主干:所有相机图像经过 ResNet-10(共享权重)编码后,与 proprioception 的 MLP 编码拼接,输入共享的 MLP Head。
SAC 分支:输入特征 → 输出均值 μ 和方差 σ → 采样得到连续的 Delta 位移向量(单臂 6 维,双臂 12 维)。
DQN 分支(GraspCritic):输入特征 → 输出 3 个 Q 值(关/保持/开)→ argmax 选出最大 Q 的动作。
统一更新:虽然算法不同,但它们在同一个训练循环中被同步优化。
具体来说,HIL-SERL 在这些任务中分别求解两个马尔可夫决策过程MDP
M 1 = { S , A 1 , ρ 1 , P 1 , r , γ } \mathcal{M}_{1}=\left\{\mathcal{S}, \mathcal{A}_{1}, \rho_{1}, \mathcal{P}_{1}, r, \gamma\right\} M1={S,A1,ρ1,P1,r,γ}
M 2 = { S , A 2 , ρ 2 , P 2 , r , γ } \mathcal{M}_{2}=\left\{\mathcal{S}, \mathcal{A}_{2}, \rho_{2}, \mathcal{P}_{2}, r, \gamma\right\} M2={S,A2,ρ2,P2,r,γ}
其中 A 1 \mathcal{A}_{1} A1和 A 2 \mathcal{A}_{2} A2分别是连续和离散动作空间。它们都接收来自环境的相同状态观测,如图像、本体感受、夹爪状态等。对于 M 2 \mathcal{M}_{2} M2的critic更新,遵循标准的DQN方法,并引入额外的目标网络以稳定训练。
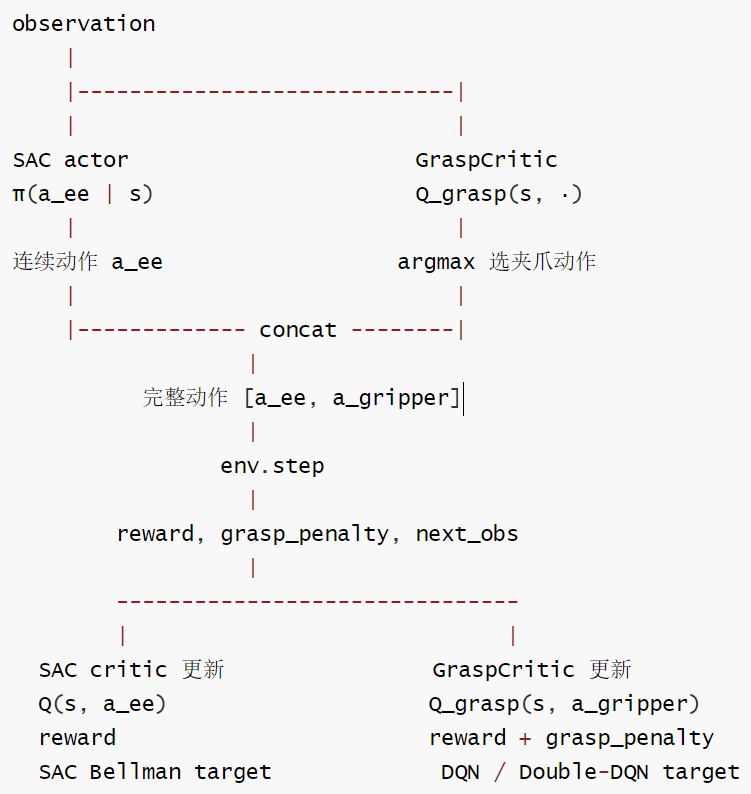
在训练或推理时,HIL-SERL 首先从策略 M 1 \mathcal{M}_{1} M1中查询连续动作,然后在 M 2 \mathcal{M}_{2} M2中通过对评论家critic的输出取argmax来获得离散动作,最后作者将连接的动作应用于机器人。
3.3 Rollout 时的配合
在 sample_actions 方法中,两个分支的协作流程非常清晰:
def sample_actions(self, observations, *, seed, argmax=False, **kwargs):
# SAC 部分:生成连续动作(位置+方向)
dist = self.forward_policy(observations, rng=seed, train=False)
if argmax:
ee_actions = dist.mode()
else:
ee_actions = dist.sample(seed=seed)
# DQN 部分:选择离散抓取动作
grasp_q_values = self.forward_grasp_critic(observations, rng=grasp_key, train=False)
grasp_action = grasp_q_values.argmax(axis=-1) # 贪心选择
# 组合动作
return jnp.concatenate([ee_actions, grasp_action[..., None]], axis=-1)
连续控制分支的 Rollout 符合经典 SAC 范式——只依赖 Actor 网络,Critic 不参与推理。
离散控制分支则不同——由于没有独立的 Actor 网络,GraspCritic(DQN)在推理时直接充当"决策者",通过 argmax 选出最优离散动作。
3.4 训练时的配合
训练时,SAC 和 DQN 使用不同的损失函数和不同的回传目标,但共享同一套观测编码:
Critic 训练:只使用连续动作部分
actions = batch["actions"][..., :-1] # 去掉最后一维夹爪
target_q = rewards + γ · min_i Q_target_i(s', a')
critic_loss = MSE(predicted_q, target_q)
GraspCritic 训练:只使用离散夹爪部分 + grasp_penalty
grasp_rewards = batch["rewards"] + batch["grasp_penalty"]
target_grasp_q = grasp_rewards + γ · max Q_target(s', a'_grasp)
grasp_critic_loss = MSE(predicted_q, target_grasp_q)
Actor 训练:采样连续动作,最大化 Q(s,a) - α·log π(a|s)
actor_loss = -mean(predicted_q - temperature * log_probs)
这种设计确保了 reward 的分工:SAC Critic 只关心末端执行器的连续动作价值,GraspCritic 则额外学习"不要做无意义夹爪动作"的惩罚信号。
3.5 输出维度对比
设计者把动作空间拆成了两部分:
前 6 维连续动作:由 SAC actor 输出
最后 1 维夹爪动作:由 GraspCritic(DQN 风格)选择
在 update 中,agent 明确要求单臂动作维度为 7:
chex.assert_shape(batch["actions"], (batch_size, 7))
具体对比如下:
| Agent 类型 | SAC 输出 | DQN 输出 | 最终动作维度 |
|---|---|---|---|
| SingleArm | 6 维 (3位置+3方向) | 3 维 (关/保持/开) | 7 维 |
| DualArm | 12 维 (双臂各6维) | 9 维 (3×3双臂组合) | 14 维 |
3.6 SAC vs DQN:靶向设计
两者在 Target 计算上的差异反映了各自面对的问题域完全不同:
DQN 的 Target(硬最大):
Target = r + γ max a ′ Q target ( s ′ , a ′ ) \text{Target} = r + \gamma \max_{a'} Q_{\text{target}}(s', a') Target=r+γa′maxQtarget(s′,a′)
它假设下一时刻一定选分数最高的动作。因为动作空间是离散且极小的(2-3 个),通过 target_net 的缓慢更新已经能抵消大部分高估问题。
SAC 的 Target(软预期):
Target = r + γ E a ′ ∼ π ( ⋅ ∣ s ′ ) [ Q target ( s ′ , a ′ ) − α log π ( a ′ ∣ s ′ ) ] \text{Target} = r + \gamma \mathbb{E}_{a' \sim \pi(\cdot|s')} \left[ Q_{\text{target}}(s', a') - \alpha \log \pi(a'|s') \right] Target=r+γEa′∼π(⋅∣s′)[Qtarget(s′,a′)−αlogπ(a′∣s′)]
它不选最高的,而是对当前策略输出的所有可能动作求期望,并加上熵奖励。面对无穷多个连续动作,SAC 必须用"双网络取最小值(Clipped Double-Q)"来暴力压制高估。
把这两个差异总结成一句话:**DQN 是"轻量级防守"(离散空间够小,target_net 足矣),SAC 是"重量级防守"(连续空间高估无限放大,必须双 Q + min)。**这个区别反映在代码上就是:DQN 找最大值,SAC 则需要从 Actor 里采样一个动作 a ′ a' a′ 出来算 Q 值。
0x04 GraspCritic:夹爪离散决策网络
GraspCritic 是 HIL-SERL 中一个关键但容易被忽视的设计。它不是普通 SAC 里的 Critic(s, a),而是一个只输入 observation、不显式输入 action 的离散动作 Q 网络。
4.1 定位与架构
GraspCritic 不是普通 SAC 里的 Critic(s, a),而是一个只输入 observation、不显式输入 action的离散动作 Q 网络。
GraspCritic 的输入输出:
输入: observation (无 action)
输出: 3 个 Q 值 → 夹爪开(0) / 保持(1) / 关(2)
训练: DQN 式目标(在线网络选动作 + 目标网络评估)
奖励: grasp_rewards = batch["rewards"] + batch["grasp_penalty"]
网络结构同样采用 ResNet-10 + MLP,但 MLP 维度比 Critic 小(单臂为 [128, 128]),因为它只需要学习夹爪的离散决策,不需要建模连续动作的精细价值。
class GraspCritic(nn.Module):
encoder: Optional[nn.Module]
network: nn.Module
output_dim: Optional[int] = 3 # 默认3个离散动作
def __call__(self, observations, train=False):
obs_enc = self.encoder(observations) # ResNet编码
outputs = self.network(obs_enc, train) # MLP
value = nn.Dense(self.output_dim)(outputs)
return value # (batch_size, 3)
核心前向逻辑是:
- 输入 observation;
- 经过视觉 / proprioception encoder;
- 经过 MLP;
- 输出
output_dim个 Q 值。
默认 output_dim=3,对应单臂夹爪的 3 个离散动作:
0 -> 环境动作 -1
1 -> 环境动作 0
2 -> 环境动作 +1
代码里训练时把环境动作最后一维从 {-1, 0, 1} 映射到 {0, 1, 2}:
grasp_action = jnp.round(batch["actions"][..., -1]).astype(jnp.int16) + 1
因此,GraspCritic(obs) 的输出可以理解为:
[
Q_grasp(obs, close_or_negative),
Q_grasp(obs, keep),
Q_grasp(obs, open_or_positive)
]
也就是说,它在回答一个很具体的问题:在当前图像和机器人状态下,夹爪应该关、保持,还是开?每个选择未来能带来多大价值?
4.2 为什么需要单独的 GraspCritic?
考虑一个完整的动作向量:[x, y, z, roll, pitch, yaw, gripper]
前 6 维是连续控制,SAC 的 Gaussian policy 天然适合。但最后一维 gripper 本质上不是平滑连续信号。如果把夹爪也塞进连续的 SAC actor 里:
- 动作语义离散但 policy 输出连续:SAC 会输出类似
0.13、-0.27这种值,夹爪真实执行时被阈值化,导致学习信号不稳定 - 夹爪动作稀疏且关键:抓取任务里,"什么时候闭合夹爪"是一个关键离散决策。闭早了抓空,闭晚了错过物体
- 夹爪误操作需要额外惩罚:代码里有
grasp_penalty,惩罚不必要的开合动作。例如 USB 插入任务中,夹爪已经接近闭合还继续执行关闭动作,会产生惩罚
所以这份实现把动作空间拆开:
连续末端执行器动作:SAC actor + SAC critic 学
离散夹爪动作:GraspCritic 用 DQN 风格学
4.3 学习原理:Double DQN 风格的离散动作价值学习
GraspCritic 的训练采用的是 DQN 式 Bellman 回归$ Q_{\theta}(s_t, a^g_t) \leftarrow r^g_t + \gamma \cdot \max_{a^g_{t+1}} Q_{\bar{\theta}}(s_{t+1}, a^g_{t+1}) $,但代码里更接近 Double DQN:
Step 1:用 online grasp critic 选择下一步最优夹爪动作
next_grasp_qs = self.forward_grasp_critic(batch["next_observations"], rng=rng)
best_next_grasp_action = next_grasp_qs.argmax(axis=-1)
Step 2:用 target grasp critic 评估这个动作的 Q 值
target_next_grasp_qs = self.forward_target_grasp_critic(...)
target_next_grasp_q = target_next_grasp_qs[jnp.arange(batch_size), best_next_grasp_action]
Step 3:构造目标值(含 grasp_penalty)
grasp_rewards = batch["rewards"] + batch["grasp_penalty"]
target_grasp_q = grasp_rewards + discount * masks * target_next_grasp_q
Step 4:当前网络只取实际执行的夹爪动作对应的 Q
predicted_grasp_q = predicted_grasp_qs[jnp.arange(batch_size), grasp_action]
Step 5:用 MSE 做 TD 回归
grasp_critic_loss = jnp.mean((predicted_grasp_q - target_grasp_q) ** 2)
4.4 GraspPenalty 的工程意义
if (action[-1] < -0.5 and self.last_gripper_pos > 0.9) or (
action[-1] > 0.5 and self.last_gripper_pos < 0.9
):
info["grasp_penalty"] = self.penalty
else:
info["grasp_penalty"] = 0.0
通俗理解:夹爪已经开得很大还继续开,或者已经关得很紧还继续关——这种动作没有实际意义,甚至可能损坏硬件。GraspPenalty 就是专门给这类无意义夹爪动作施加的额外惩罚。
这类惩罚不适合直接影响 SAC Critic(因为它专注于连续动作的价值),但非常适合训练 GraspCritic 的离散决策。
4.5 SACAgentHybridSingleArm 的完整组件架构
SAC 和 GraspCritic 在同一个 Agent 中统一管理:
SACAgentHybridSingleArm 组件架构:
1. Actor网络(连续动作,SAC):
├── Encoder: ResNet-10 (共享)
├── MLP: [256, 256]
└── Output: action_dim=6 (单臂关节+方向)
2. Critic网络(连续动作,SAC):
├── Encoder: ResNet-10 (共享)
├── MLP Ensemble: [256, 256] × 2个网络
└── Output: Q值
3. GraspCritic网络(离散动作,DQN):
├── Encoder: ResNet-10 (共享)
├── MLP: [128, 128]
└── Output: 3个Q值 (关/保持/开)
4. Temperature网络(自动调温):
└── 输出: 标量温度参数 α
在 create_pixels 中,agent 会在网络集合里额外注册 "grasp_critic",并给它单独配置 optimizer。训练脚本中,hybrid agent 的 train_critic_networks_to_update 同时包含 critic 和 grasp_critic,完整训练阶段则更新四个网络。
0x05 奖励系统:二值分类器
HIL-SERL 的 reward 设计非常务实。对于所有的任务,他们采用稀疏奖励函数,该函数使用训练过的分类器对任务是否成功进行二元判定。奖励函数会引导学习过程并评估策略的优劣,HIL-SERL 用离线数据,并为每个任务训练一个二元分类器(binary classifier),该分类器只有在任务完成时给予正奖励,否则奖励为零。
具体而言,为了让机器人能无人值守地进化,Hi-SERL 引入了基于视觉的自动裁判。
-
对比学习架构: 预先拍摄少量(20–50 张)任务成功的照片和失败的照片,训练一个轻量级的卷积神经网络(如 ResNet)。
-
双重反馈机制:
- Binary Reward: 分类器实时给出 0(未完成)或 1(成功)的信号。
- Intervention Penalty: 当人类接管时,系统自动插入一个负奖励(如 -1.0)。
-
结果: 这一组合拳让机器人具备了 “自知之明”,即使没有复杂的传感器,也能通过摄像头知道自己刚才这一下到底干得怎么样。
5.1 为什么是稀疏二值奖励?
除非特别说明,HIL-SERL 对所有任务都采用稀疏二元奖励:成功 = 1,未完成 = 0。没有连续的中间进度信号,没有复杂的 reward shaping。
| 任务 | 奖励条件 | 中间进度 |
|---|---|---|
| Peg Insert | 位姿 delta 低于阈值 → 1 | 无 |
| PCB Insert | 位姿 delta 低于阈值 → 1 | 无 |
| Bin Relocation | 图像分类器 sigmoid ≥ 0.5 → 1 | 无 |
| USB 插入 | 分类器 sigmoid ≥ 0.7 + 夹爪开度 → 1 | 无 |
| RAM 插入 | 分类器 sigmoid ≥ 0.85 + z 位置 → 1 | 无 |
| Egg Flip | 3-way 分类器 ≥ 0.9 → 1 | 无 |
代码中的明确声明:
def compute_reward(self, obs, gripper_action_effective) -> bool:
"""we are using a sparse reward function.""" # ← 明确声明
delta = np.abs(current_pose - self._TARGET_POSE)
if np.all(delta < self._REWARD_THRESHOLD):
reward = 1
else:
reward = 0 # ← 不在阈值内就是0,没有中间值
5.2 为什么稀疏奖励也能工作?
按常识看,稀疏奖励非常难学——机器人如果很久得不到 1,就不知道怎么改。HIL-SERL 能让稀疏奖励工作,关键不在 reward 本身变密集,而在于人类干预提供了正确动作轨迹:
稀疏 reward 告诉系统"最终有没有成功";
人类 correction 告诉系统"在错误状态下应该怎么做"。
两者结合,弥补了纯稀疏 RL 的探索困难。纯 RL + 稀疏奖励:策略随机探索 → 几乎不可能碰到成功 → 永远学不到。SERL 的方案:人类干预 → 提供成功轨迹 → Demo Buffer 50/50 采样 → 策略快速学会。
5.3 奖励分类器架构
输入图像 (H×W×C, 可带4帧堆叠)
↓
ResNet-10 (ImageNet预训练,冻结权重)
↓
SpatialLearnedEmbeddings (8个可学习空间块池化)
↓
Dense(256) → LayerNorm → tanh ← 唯一可训练的视觉部分
[多摄像头时各编码器输出 concat]
↓
Dense(256) → Dropout(0.1) → LayerNorm → ReLU
↓
Dense(1) → logit → sigmoid → 概率
关键设计:ResNet-10 冻结,只训练池化层 + MLP head,参数量极小(约 50K),训练极快。
5.4 如何处理置信度
硬阈值,无降级:
reward = (sigmoid(logit) >= threshold) * 1.0 # 0 或 1, 没有中间值
硬阈值够用的原因:分类器训练数据充足 + ResNet-10 预训练特征强,实际部署中置信度分布高度双峰——要么接近 0,要么接近 1,很少落在模糊区间。
5.5 两个关键设计点
正负样本强制 1:1 采样:如果按真实比例,failure 远多于 success,直接训练容易得到一个"永远预测失败"的假高准确率分类器。强制平衡采样让模型真正学习成功状态和失败状态的视觉差异。
图像随机裁剪增强:不要让模型只记住"物体刚好在图像第 123 个像素位置就是成功",而要让它学会"物体插入后的视觉结构长什么样"。
for pixel_key in config.classifier_keys:
observations = observations.copy(add_or_replace={
pixel_key: batched_random_crop(
observations[pixel_key], rng, padding=4, num_batch_dims=2
)
})
5.6 为什么不用 DrQ / VICE?
HIL-SERL 的选择不是技术上的不能,而是工程上的权衡。
DrQ 被预训练 + JAX 编译取代。DrQ 的核心是靠"小动作(裁剪、平移)"来增强小模型的视觉能力。HIL-SERL 采用的是更强的 ResNet-10 预训练权重,并在数据进入 Buffer 前做简单的 Random Crop,而不是在 Loss 层进行复杂的一致性约束。对于真机任务,"轻量级增强配合 High UTD"已经足够。
VICE 被 HIL 人类干预降维打击。VICE 是为了解决"没人给分怎么办"发明的——它需要你提前拍几百张照片训练裁判,且裁判容易误判。HIL-SERL 认为人类的干预信号是比 VICE 判别器高得多质量的信号。
VICE: 让 AI 去猜"这像不像成功"
HIL-SERL: 让人类告诉 AI"这绝对是错的"或"这绝对是对的"
5.7 train_reward_classifier.py
train_reward_classifier.py 脚本是 HIL-SERL 里非常关键的一环,因为真实机器人任务往往没有天然 dense reward。例如 RAM 是否插到底、USB 是否插入端口,这些事情靠传统状态量很难稳定判断,所以项目用视觉分类器来学习一个任务成功判别器。
任务级成功判别器
train_reward_classifier.py 不是在训练通用价值函数,而是在为某个具体机器人任务训练一个视觉成功判别器(binary classifier),它输入 observation 图像,输出任务成功概率 logit,把真实机器人的稀疏任务成功条件转化为 RL 可用的 reward。
train_reward_classifier.py 的训练目标是二分类 BCE:
return optax.sigmoid_binary_cross_entropy(logits, batch["labels"]).mean()
它没有输入 action,也没有做 Bellman backup,更没有估计 [ Q(s, a) ] 或 [ V(s) ]
所以它不是 RL 里的 critic / value function,而是:
视觉成功检测器:observation -> success probability
它的作用更接近“自动奖励标注器”。
train_reward_classifier.py 使用的是:
ImageNet 预训练视觉 encoder
+
任务级 reward classifier
+
任务级在线 SAC / RLPD critic 训练
+
可选 BC 预训练
其中 ImageNet ResNet 是视觉特征预训练,不是操作价值函数预训练;reward classifier 是任务成功检测器,也不是 Bellman 意义上的价值函数。
模型架构
- 网络结构:简单的BinaryClassifier或NWayClassifier
class BinaryClassifier(nn.Module):
encoder_def: nn.Module
hidden_dim: int = 256
@nn.compact
def __call__(self, x, train=False):
x = self.encoder_def(x, train=train) # ResNet编码
x = nn.Dense(self.hidden_dim)(x)
x = nn.Dropout(0.1)(x, deterministic=not train)
x = nn.LayerNorm()(x)
x = nn.relu(x)
x = nn.Dense(1)(x) # 二分类输出
最后输出是一个 logit,不直接输出 sigmoid 后的概率。
observation images
-> EncodingWrapper
-> PreTrainedResNetEncoder
-> Dense(hidden_dim)
-> Dropout
-> LayerNorm
-> ReLU
-> Dense(1)
-> logit
- 架构选择:使用的是ResNet-10预训练编码器 + MLP分类头
pretrained_encoder = resnetv1_configs["resnetv1-10-frozen"](
pre_pooling=True,
name="pretrained_encoder",
)
- 权重加载:直接加载ImageNet-1K预训练的ResNet-10参数
url = f"https://github.com/rail-berkeley/serl/releases/download/resnet10/{file_name}"
# 下载并加载预训练权重
训练流程
读取 exp_name 对应任务配置
→ 创建 fake env,获取 observation/action space
→ 读取 success*.pkl(标 label=1)和 failure*.pkl(标 label=0)
→ 正负样本各采一半,构造平衡 batch
→ 创建基于 ResNet-10 ImageNet 预训练 encoder 的 BinaryClassifier
→ 对指定图像做 random crop 增强
→ 用 sigmoid binary cross entropy 训练(默认 150 epoch)
→ 打印 loss / accuracy
→ 保存到 classifier_ckpt/
→ 后续 RL 环境加载该 classifier,将阈值化后的结果转成 reward
使用范式:任务级 reward classifier + 在线 RL critic
HIL-SERL 实现采用的是:
任务级 reward classifier
+
人类 demonstrations / interventions
+
在线 SAC / RLPD 训练 critic 和 actor
在训练 RL 时,环境会加载对应任务目录下的 reward classifier checkpoint,然后把 classifier 输出转成 reward。
例如 RAM insertion 配置中:
classifier = load_classifier_func(
key=jax.random.PRNGKey(0),
sample=env.observation_space.sample(),
image_keys=self.classifier_keys,
checkpoint_path=os.path.abspath("classifier_ckpt/"),
)
然后定义 reward:
return int(sigmoid(classifier(obs)) > 0.85 and obs['state'][0, 6] > 0.04)
最后用 wrapper 替换环境 reward:
env = MultiCameraBinaryRewardClassifierWrapper(env, reward_func)
wrapper 里面会在每一步调用 classifier reward,并用它覆盖环境原始 reward:
rew = self.compute_reward(obs)
done = done or rew
info['succeed'] = bool(rew)
所以项目里的 reward classifier 是为了回答:当前图像是否已经达到任务成功状态?而不是回答:当前状态-动作对对未来多任务成功的长期价值是多少?
优劣
优势:任务 reward 定义简单:机器人真实任务的 reward 很难手写,例如“USB 是否完全插入”。用视觉二分类器替代人工规则,可以快速适配新任务;和 HIL 流程契合:人类只需要采集 success / failure 样本,不需要设计复杂 reward shaping;正负样本平衡采样:每个 batch 正负样本各一半,避免分类器被类别不平衡带偏;使用预训练视觉 encoder,ResNet-10 虽然不是机器人操作预训练,但可以减少视觉训练难度,尤其在 classifier data 不多时很有帮助。
局限:它是任务特定的。每个任务有自己的 classifier_data/ 和 classifier_ckpt/,不能天然迁移到另一个任务。它只判断当前状态,不建模未来——它不知道动作,也不知道未来回报,因此不能替代 SAC critic。如果分类器出现 false positive/false negative,会直接污染 RL reward,需要补采针对性数据。
0x06 SACAgentHybridSingleArm:单臂混合动作 SAC Agent
SACAgentHybridSingleArm 不是纯粹的 SAC,而是 SAC + DQN 混合体——用 SAC 输出连续末端执行器动作,用 GraspCritic(DQN 风格)输出离散夹爪动作。它解决了机器人操作中一个非常现实的矛盾:手臂需要丝滑的连续移动,而手指(夹爪)通常只需要果断的开关动作。
6.1 组件架构
SACAgentHybridSingleArm 是一个单臂混合动作强化学习 agent。代码注释说得很直接:Compared to SACAgent, this agent has a hybrid policy, with the gripper actions learned using DQN. Use this agent for single arm setups.
它的内部由四个网络组件构成,共享同一个视觉编码器:
1. Actor网络(连续动作,SAC):
├── Encoder: ResNet-10 (共享)
├── MLP: [256, 256]
└── Output: action_dim=6 (单臂位置+方向)
2. Critic网络(连续动作,SAC):
├── Encoder: ResNet-10 (共享)
├── MLP Ensemble: [256, 256] × 2个网络
└── Output: Q值
3. GraspCritic网络(离散动作,DQN):
├── Encoder: ResNet-10 (共享)
├── MLP: [128, 128] (注意这里是 128,比 critic 小)
└── Output: 3个Q值 (单臂抓取:{-1,0,1})
4. Temperature网络(自动调温):
└── 输出: 标量温度参数 α
与 DuckArm 的主要区别:
- Actor 输出 6 维(vs DualArm 的 12 维)
- GraspCritic 输出 3 维(vs DualArm 的 9 维——3×3 双臂夹爪组合)
- GraspCritic 的 MLP 维度更小:
[128,128]vs[256,256]
Actor特征:
═══════════════════════════════ Actor输入结构 ════════════════════════
observations (字典格式):
├── "wrist_1": (batch_size, height, width, channels) # 手腕摄像头图像
├── "side": (batch_size, height, width, channels) # 侧面摄像头图像
└── "state": (batch_size, proprio_dim) # 本体感知信息
├── tcp_pose: (7,) # 末端执行器位姿 (位置+四元数)
├── tcp_vel: (6,) # 末端执行器速度
├── q: (7,) # 关节位置
└── dq: (7,) # 关节速度
═══════════════════════════════ Actor前向传播 ════════════════════════
observations → EncodingWrapper → ResNet images + MLP state
→ MLP Head → action_means, action_stds
→ Gaussian/TanhNormal distribution
Critic特征:
═══════════════════════════════ Critic输入结构 ════════════════════════
inputs (经过编码后):
├── obs_enc (与Actor相同的观测编码):
│ ├── ResNet编码图像特征
│ └── MLP编码状态特征
└── actions (动作向量):
├── 对于SingleArm: (batch_size, 6) # 位置+方向
└── 对于DualArm: (batch_size, 12) # 双臂位置+方向
═══════════════════════════════ Critic前向传播 ════════════════════════
observations → EncodingWrapper → ResNet images + MLP state
→ concat(observations_encoding, actions) # 关键差异
→ MLP Ensemble Head → Q_values
这种设计使得:
- Actor:学习"给定观测,应该采取什么动作"的策略函数
- Critic:学习"给定观测和动作,这个决策的价值如何"的价值函数
- Actor只需要观测,而Critic需要观测和动作的组合,这是Actor-Critic架构的经典设计模式。
6.2 相比普通 SACAgent 的关键差异
普通 SACAgent 的 actor 输出完整动作,critic 接收完整动作。但 SACAgentHybridSingleArm 做了三层动作拆分:
第一层:连续动作由 SAC actor 输出
初始化 policy 时,action_dim 被设为环境动作维度减 1:
policy_def = Policy(
...
action_dim=actions.shape[-1]-1, # 7 - 1 = 6
)
如果环境 action 是 7 维,actor 只输出前 6 维——末端执行器的连续控制量。
第二层:普通 critic 也只评估连续动作
Critic 初始化时只用去掉夹爪的动作:
critic = [observations, actions[..., :-1]]
训练 critic 时也只取前 6 维:
actions = batch["actions"][..., :-1]
这意味着普通 SAC critic 学习的是 Q ee ( s , a ee ) Q_{\text{ee}}(s, a^{\text{ee}}) Qee(s,aee),而不是 Q ( s , a ee , a gripper ) Q(s, a^{\text{ee}}, a^{\text{gripper}}) Q(s,aee,agripper)。它专注于连续末端执行器动作的价值估计。
第三层:夹爪动作由 GraspCritic 单独学习
SACAgentHybridSingleArm 在网络集合里额外注册了 "grasp_critic",并给它单独配置 optimizer:
networks = {
"actor": actor_def,
"critic": critic_def,
"grasp_critic": grasp_critic_def,
"temperature": temperature_def,
}
"grasp_critic": make_optimizer(**grasp_critic_optimizer_kwargs)
在 create_pixels 中,GraspCritic 的构造方式如下:
grasp_critic_def = partial(
GraspCritic, encoder=encoders["grasp_critic"], network=grasp_critic_backbone
)(name="grasp_critic")
6.3 动作执行流程(Rollout)
sample_actions 是 SAC actor 和 GraspCritic 配合最直观的接口。执行流程分为四步:
第一步:actor 采样连续末端执行器动作
dist = self.forward_policy(observations, rng=seed, train=False)
ee_actions = dist.sample(seed=seed)
这里得到前 6 维动作:[x, y, z, roll, pitch, yaw]。
第二步:GraspCritic 输出 3 个夹爪 Q 值
grasp_q_values = self.forward_grasp_critic(observations, rng=grasp_key, train=False)
输出类似:
Q(close) = 1.2
Q(keep) = 0.7
Q(open) = 0.1
第三步:argmax 选择夹爪动作
grasp_action = grasp_q_values.argmax(axis=-1)
grasp_action = grasp_action - 1 # {0,1,2} → {-1,0,1}
映射关系:argmax=0 → 环境动作 -1(关),argmax=1 → 环境动作 0(保持),argmax=2 → 环境动作 +1(开)。
第四步:拼接成完整动作
return jnp.concatenate([ee_actions, grasp_action[..., None]], axis=-1)
最终输出:
[continuous_0, continuous_1, continuous_2,
continuous_3, continuous_4, continuous_5,
discrete_gripper_action] ← 环境真正需要的完整 7 维动作
连续控制分支的 Rollout 符合经典 SAC 范式——只依赖 Actor 网络,Critic 不参与推理。
离散控制分支则不同——由于没有独立的 Actor 网络,GraspCritic 在推理时直接充当"决策者",通过 argmax 选出最优离散动作。
6.4 训练流程
SACAgentHybridSingleArm.loss_fns 返回四个独立的 loss:
return {
"critic": self.critic_loss_fn,
"grasp_critic": self.grasp_critic_loss_fn,
"actor": self.policy_loss_fn,
"temperature": self.temperature_loss_fn,
}
训练脚本中,hybrid agent 的更新分为两个阶段:
Critic 训练阶段同时更新 critic 和 grasp_critic:
train_critic_networks_to_update = frozenset({"critic", "grasp_critic"})
完整训练阶段更新全部四个网络:
train_networks_to_update = frozenset({"critic", "grasp_critic", "actor", "temperature"})
Critic Loss(连续动作 SAC)
目标 Q 采用 Clipped Double-Q:
y = r + γ ⋅ min i Q θ ˉ i ( s ′ , a ′ ) y = r + \gamma \cdot \min_i Q_{\bar{\theta}_i}(s', a') y=r+γ⋅iminQθˉi(s′,a′)
代码实现:
target_next_qs = self.forward_target_critic(...)
target_next_min_q = target_next_qs.min(axis=0)
target_q = rewards + discount * masks * target_next_min_q
predicted_qs = self.forward_critic(batch["observations"], actions, ...)
critic_loss = jnp.mean((predicted_qs - target_qs) ** 2)
GraspCritic Loss(DQN 风格)
GraspCritic 采用 Double DQN 风格——用 online 网络选动作,用 target 网络评估:
next_grasp_qs = self.forward_grasp_critic(batch["next_observations"], rng=rng)
best_next_grasp_action = next_grasp_qs.argmax(axis=-1)
target_next_grasp_qs = self.forward_target_grasp_critic(...)
target_next_grasp_q = target_next_grasp_qs[jnp.arange(batch_size), best_next_grasp_action]
grasp_rewards = batch["rewards"] + batch["grasp_penalty"]
target_grasp_q = grasp_rewards + discount * masks * target_next_grasp_q
predicted_grasp_q = predicted_grasp_qs[jnp.arange(batch_size), grasp_action]
grasp_critic_loss = jnp.mean((predicted_grasp_q - target_grasp_q) ** 2)
Actor Loss(标准 SAC)
Actor 采样连续动作,最大化:
objective = Q ( s , a ) − α log π ( a ∣ s ) \text{objective} = Q(s, a) - \alpha \log \pi(a|s) objective=Q(s,a)−αlogπ(a∣s)
actor_objective = predicted_q - temperature * log_probs
actor_loss = -jnp.mean(actor_objective)
Temperature Loss(自动调温)
温度参数 α \alpha α 自动调节,保证策略熵不低于目标值——策略熵低于 target 则 α \alpha α 增大并增加探索,高于 target 则 α \alpha α 减小并减少探索。
6.5 Reward 的分工设计
这是混合 agent 中最精妙的工程细节之一。
普通 SAC critic 的目标使用:
batch["rewards"]
GraspCritic 的目标使用:
grasp_rewards = batch["rewards"] + batch["grasp_penalty"]
设计者的意图很明确:夹爪网络不仅要学习任务成功奖励,还要特别学习"不要做无意义夹爪动作"。
例如 USB pickup insertion 任务中,grasp_penalty 的计算逻辑是:
if (action[-1] < -0.5 and self.last_gripper_pos > 0.9) or (
action[-1] > 0.5 and self.last_gripper_pos < 0.9
):
info["grasp_penalty"] = self.penalty
else:
info["grasp_penalty"] = 0.0
通俗理解:夹爪已经开得很大还继续开,或者已经关得很紧还继续关——这种动作没有实际意义,甚至可能损坏硬件或扰乱任务。
这类惩罚不适合影响机械臂连续运动的 SAC critic——因为 SAC critic 评估的是 6 维连续动作的价值,加上夹爪惩罚会混淆它对末端执行器动作质量的判断。但 GraspCritic 专门学习夹爪的离散决策,加上 grasp_penalty 可以更精准地训练"什么时候该夹、什么时候该放"的策略。
6.7 配合全景图
将整个执行与训练流程汇总在一起:
6.8 使用场景
训练脚本中,当配置为 'single-arm-learned-gripper' 时创建 SACAgentHybridSingleArm:
config.setup_mode == 'single-arm-learned-gripper'
agent = make_sac_pixel_agent_hybrid_single_arm(...)
include_grasp_penalty = True
对应的 replay buffer 也会额外存储 grasp_penalty 字段。这意味着整个数据链路——从环境采集、buffer 存储、到 loss 计算——都为这个混合设计做了适配。
0x07 训练稳定性机制
人类干预会导致 Q 值跳变——干预瞬间,策略动作被替换为人类动作,但 Q 网络对人类动作的估值可能极不准确。HIL-SERL 没有针对干预做特殊的稳定处理,而是依靠 SAC 自身的通用机制:
| 机制 | 作用 | 是否针对干预 |
|---|---|---|
| Soft target update (τ=0.005) | 目标网络缓慢更新,防止 Q 值突变 | 通用 |
| REDQ min-Q (10 网络取 min) | 防止 Q 值过估计 | 通用 |
| Clipped double Q | 两个 Q 网络取最小 | 通用 |
这些机制足够稳定训练的原因是:soft update 极慢更新目标网络使 Q 值不会突变,min-Q ensemble 抑制过估计,50/50 采样中干预数据只占一半被在线数据稀释。
7.1 熵正则防止动作单一化
SAC 的温度参数 α 自动调节,保证策略不退化:
def temperature_lagrange_penalty(self, entropy, grad_params=None):
# 策略熵 < target → α 增大 → 增加探索
# 策略熵 > target → α 减小 → 减少探索
三层保护防止动作单一化:SAC 熵正则自动调节 α、高斯策略输出自带随机性、DrQ 数据增强通过 Random Crop 扰动观测间接增加策略多样性。
注意:HG-Dagger 中没有熵正则。纯 BC 训练的策略是确定性模仿,训练越久越像人类示范,没有机制防止动作单一化。
7.2 动作平滑性:靠硬件不靠 Loss
Loss 中不包含任何动作平滑性约束。平滑性保护完全由环境层和硬件实现:
| 保护层 | 实现位置 |
|---|---|
动作裁剪 np.clip(action, -1, 1) |
franka_env.py |
安全盒 clip_safety_box(nextpos) |
franka_env.py |
| ROS 阻抗控制器 1kHz 内环平滑滤波 | franka_server.py |
| 增量控制(动作是 delta pose 非绝对位姿) | franka_env.py |
| 10Hz Python 外环 + 1kHz ROS 内环 | franka_env.py |
7.3 持续训练,不等待干预
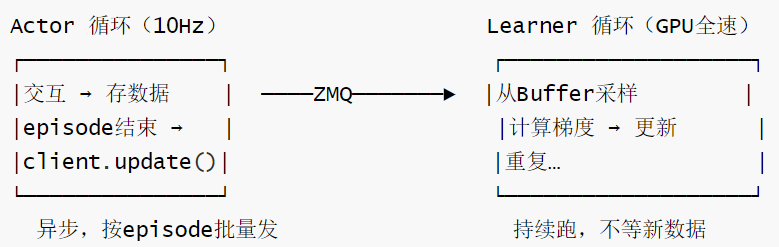
Buffer 达到阈值后,Learner 进入固定步数的 for 循环,每步都从已有 buffer 中随机采样训练,不等待新数据到达。干预数据只是填入 demo_buffer,训练循环完全无感知。
0x08 总结:算法的基因与局限
HIL-SERL 的算法设计可以拆解为三层基因:
层一: 基础 RL 框架
SAC + RLPD → 样本效率 + off-policy 稳定性
层二: 混合动作空间
SAC(连续) + DQN(离散) → 各自处理不同语义的动作维度
层三: 人类在环增强
干预数据双通道 + Reward Classifier → 补足稀疏奖励 + 解决探索瓶颈
HIL-SERL 实现了"超人"的表现(比人操作快 1.8 倍),原因在于:SAC 的路径优化发现比人类更短更直的轨迹;10Hz 高频控制没有人的神经反射延迟限制;一旦学会,机器人能以电机速度精准复现。
但作为算法体系,HIL-SERL 仍然有几个明确局限:它是任务特定的(每个任务需要新分类器和新演示),动作表示仍然是高斯 SAC(非生成式),缺乏多任务泛化能力(没有 language conditioning)。这些局限正是 LWD 用 VLA + Flow Matching + DIVL + QAM 试图解决的。
0xFF 参考
HIL-SERL——结合“人类离线演示、在线策略数据、人工在线干预”的RL方法:直接真实环境中RL开训,可组装电脑主板和插拔USB

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)