具身智能中的传感器技术48——麦克风阵列3
·
麦克风阵列在人形机器人上的主流安装位置为头顶和胸口。头顶采用环形阵列(6+1或4麦),优势在于360°无遮挡拾音、精准声源定位和低噪音干扰,但垂直角度感知较弱;胸口采用线性阵列(2-4麦),适合前方增强拾音且结构紧凑,但存在后方盲区和噪音干扰问题。特殊分散式布局因算法复杂极少使用。头顶方案适合全向交互场景,胸口方案则适用于定向服务需求。
在具身智能(人形机器人)上,麦克风阵列的安装位置不仅要考虑听得清,还要考虑交互自然和避开自身噪音。
最主流的安装位置只有两个:头顶 和 胸口。
一、 黄金位置:头顶 (Top of Head) —— “360° 全能王”
这是目前 90% 高端服务机器人(如 Pepper, 优必选 Walker, 甚至智能音箱)的标准方案。
1. 布局形态
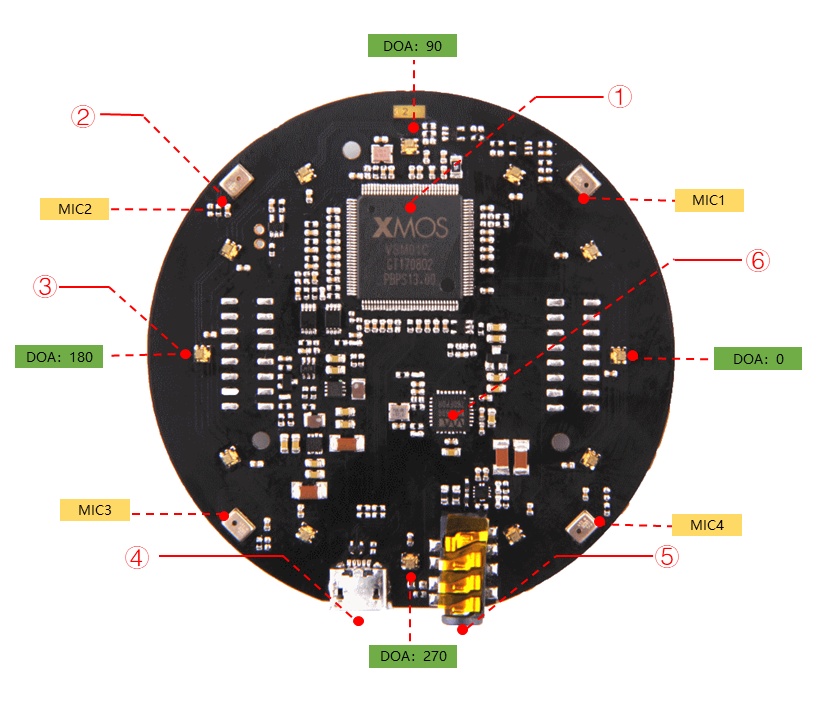
通常采用 6+1 环形阵列 或 4 麦环形阵列。
- 在头顶圆盖的边缘均匀分布麦克风。
2. 核心优势
- 无遮挡全向拾音: 头顶是机器人的最高点,四周没有任何身体部件遮挡。无论用户站在前后左右哪个方位,声音都能直达麦克风。
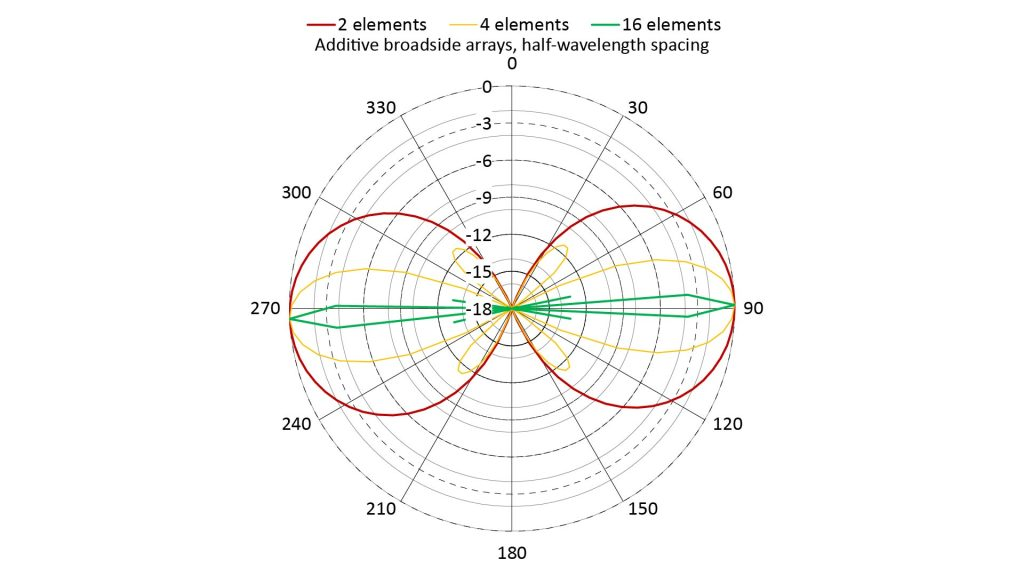
- 声源定位最准: 环形结构天生适合做 360° 平面定位。
- 远离本体噪音: 离腿部电机、胸腔散热风扇较远,信噪比相对较好。
3. 劣势
- 俯仰角感知弱: 环形阵列擅长分辨水平角度(Azimuth),但不擅长分辨垂直角度(Elevation)。不过对于面对面交流,这也够了。
二、 备选位置:胸口/肩部 (Chest / Shoulders) —— “定向聆听者”
通常用于屏幕类机器人或特种作业机器人。
1. 布局形态
通常采用 线性阵列 (Linear Array)。
- 在胸口横着排开 2-4 个麦克风。
2. 核心优势
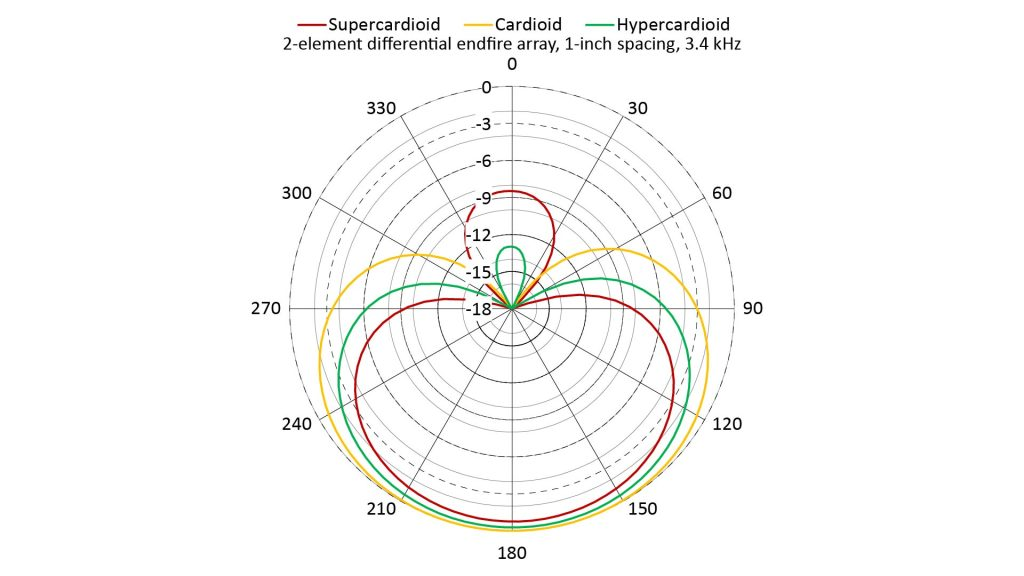
- 前方增强: 线性阵列非常适合做前方波束成形。它能像聚光灯一样,强力收集正前方的声音,抑制侧面和背后的噪音。
- 结构紧凑: 不需要像头顶那样占一大块圆盘面积。
3. 劣势
- 后方盲区: 声音从背后传来时,会被机器人的躯干遮挡(声影效应),导致听不清或定位错误。
- 噪音干扰: 胸口通常离散热风扇和核心计算单元(GPU)最近,风噪和电磁干扰最大。
三、 特殊位置:分散式 (Distributed)
- 概念: 像人耳一样,在头部左右两侧各装一个麦克风阵列,或者全身分布。
- 现状: 极少使用。
- 原因: 算法太难。多个阵列之间的时钟同步极其复杂,且并没有带来特别明显的性能提升。
总结
- 想做全能管家? 装在 头顶(环形阵列),听八方来风。
- 想做前台接待? 装在 胸口(线性阵列),专注听前面的人说话。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 5
5 0
0- 0



 已为社区贡献46条内容
已为社区贡献46条内容

所有评论(0)