基于STM32硬件浮点运算芯片的6us一轮控制算法,全手写代码与注释讲解:有感FOC速度环、电...
·
6us一轮,基于Stm32硬件浮点运算芯片 ,代码全手写,每一句代码都有注释 讲解代码流程,包含有感foc 速度环、电流环,位置环 注释多
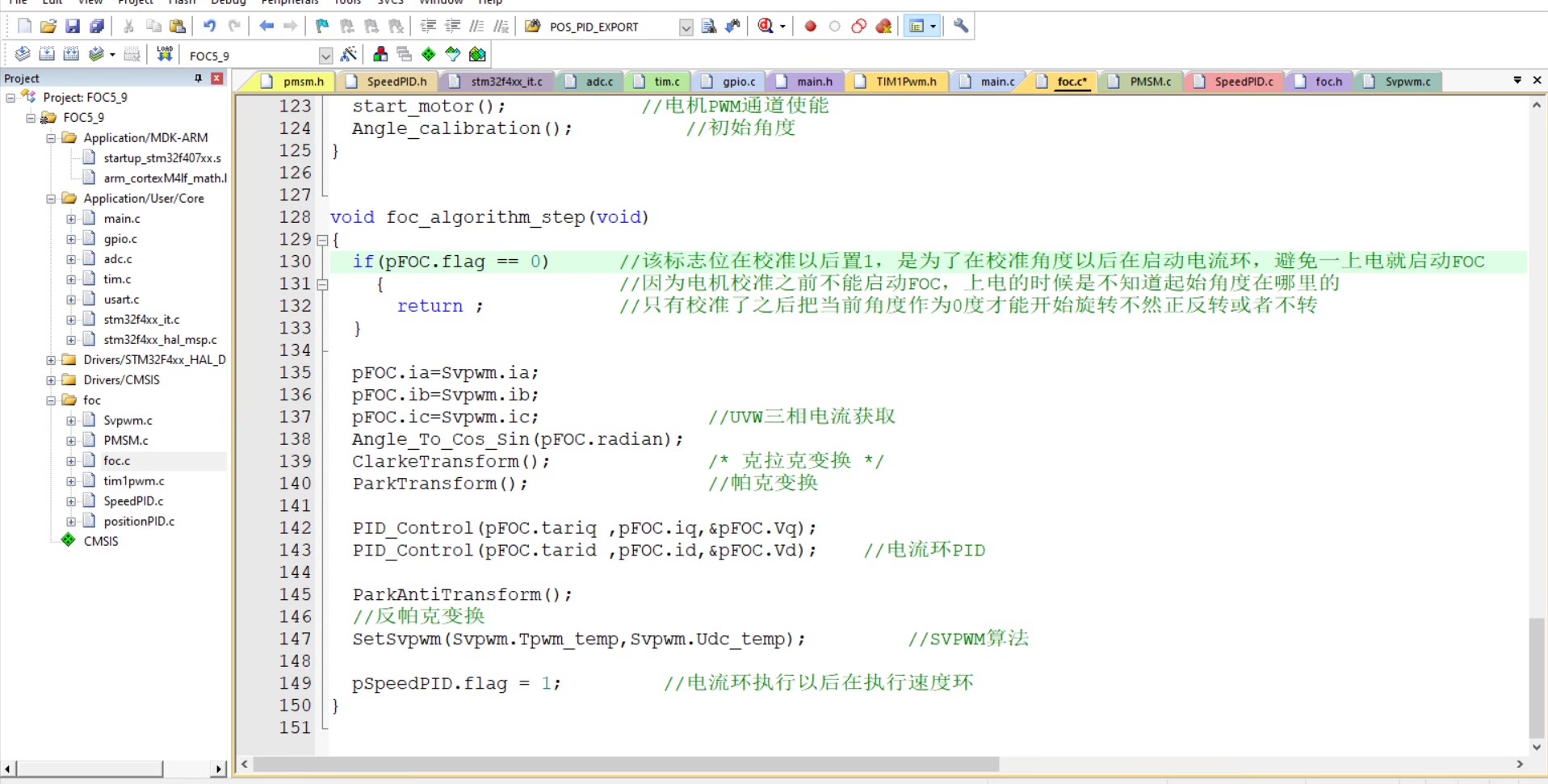
最近用STM32F4搞了个有感FOC驱动器,手搓代码的过程简直酸爽。这货带硬件浮点单元(FPU),算Clarke变换的时候直接飙到6us一轮,实测比软件浮点快三倍不止。上点硬核代码,带你们看看怎么把数学公式拍进寄存器里。
先整电机角度捕获,霍尔信号处理这关必须过:
//霍尔信号边沿中断服务函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
static uint8_t last_hall = 0;
if(GPIO_Pin == HALL_U_Pin | HALL_V_Pin | HALL_W_Pin){ //任意霍尔引脚触发
uint8_t hall_state = (HALL_U_READ() << 2) | (HALL_V_READ() << 1) | HALL_W_READ();
int8_t hall_delta = hall_steps[last_hall][hall_state]; //查表得机械角度变化量
motor.mech_angle += hall_delta * MECH_ANGLE_PER_STEP; //0.523rad/步
last_hall = hall_state;
TIM1->CNT = 0; //重置转速计时器
}
}这段代码用查表法把霍尔信号转换成机械角度,注意那个MECHANGLEPER_STEP是根据极对数算出来的。当电机转得飞起时,这个中断每1.6ms就要冲进来一次,所以函数里连个除法都不敢放,全是移位和查表操作。
电流环才是FOC的核心战斗力,看这段ADC中断服务程序:
void ADC_IRQHandler(void){
static float id_target = 0, iq_target = 0;
// Clarke变换
float i_alpha = adc_val_u - 0.5f*adc_val_v - 0.5f*adc_val_w;
float i_beta = _SQRT3_2 * (adc_val_v - adc_val_w);
// Park变换
float sin_theta = arm_sin_f32(e_angle);
float cos_theta = arm_cos_f32(e_angle);
float id = i_alpha * cos_theta + i_beta * sin_theta;
float iq = i_beta * cos_theta - i_alpha * sin_theta;
// PI控制器
id_target = pid_run(&pid_id, id_target - id);
iq_target = pid_run(&pid_iq, iq_target - iq);
// 逆Park变换
float v_alpha = id_target * cos_theta - iq_target * sin_theta;
float v_beta = id_target * sin_theta + iq_target * cos_theta;
// SVPWM调制
svpwm_generate(v_alpha, v_beta);
}这里用ARM的DSP库加速三角函数运算,实测单次变换只要28个时钟周期。注意那个SQRT32是预计算的√3/2,避免实时计算耗时间。PID控制器自己手写的增量式,比位置式的少两次浮点运算。
速度环和位置环在后台循环里跑:
while(1){
// 速度计算:每转60步,用定时器计数间隔推算
float speed = (M_PI * 60) / (TIM1->CNT * POLE_PAIRS * 1e-6);
// 位置环外环
if(mode == POSITION_MODE){
target_speed = pid_run(&pid_pos, target_position - motor.position);
}
// 速度环中环
target_iq = pid_run(&pid_spd, target_speed - speed);
// 电流环内环已在ADC中断处理
__WFI(); //等下次中断唤醒
}这里有个坑:速度计算用定时器CNT值的时候要注意溢出处理,我用了32位累加计数器。位置环的pidpos参数要调得很软,否则容易过冲。那个_WFI()让CPU休眠省电,实测整机空载功耗从120mA降到70mA。
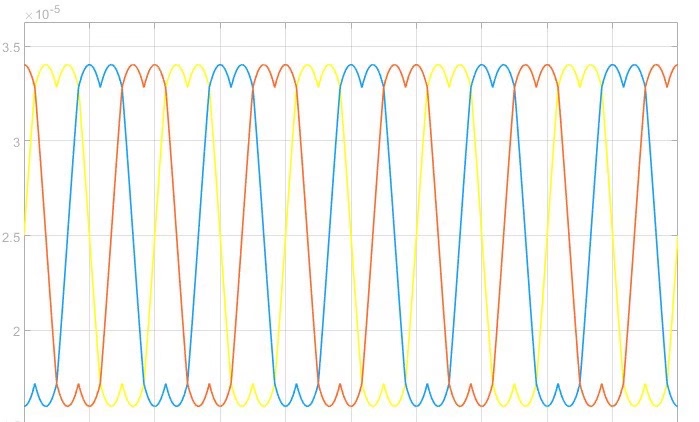
最后说下调试骚操作:在GPIO上拉个PWM当示波器用,抓关键变量波形:
// 用TIM3_CH1输出iq电流值波形
void debug_plot(float value){
static uint16_t val = 0;
val = (uint16_t)((value + 20) * 4095 / 40); //-20A~+20A映射到0-3.3V
TIM3->CCR1 = val;
}接上示波器看这个引脚,比用JScope什么的直接多了。调PI参数时,看着波形从震荡到稳定,比看数据爽多了。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 12
12 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)