柑橘采摘和质量检测分级机器人
第 1 章 作品概述
1.1 项目背景.
“果农的成本,70% 在采摘”。这小小的采摘,却有着大大的需求。采摘是水果生产链中最耗时耗力的环节,为了帮助果农减少开支来提高收入从而设计一款采摘机器人,实现推动鲜果市场的数字化转型,帮助果农脱贫落实中国乡村振兴战略。(背景)
经查阅“水果产业发展现状分析一文”,中国水果产业品类多、总量大,水果已经成为中国继粮食、蔬菜之后的第三大农业种植产业,果园总面积和水果总产量常年稳居世界首位。并且常量稳定上升,2022年与2012年相比,增幅约41.67%。水果总产量由两部分组成:果园水果,瓜果。其中果园水果中产量最大的是柑橘,瓜果中产量最大的是西瓜,该文主要针对采摘柑橘问题。(分析)
市面上暂时还没有农业采摘机器人的应用,智能采摘机器人还在发展中,20 世纪 80 年代中期以来,美、法、日、英等国家 对采集机器人进行了大量的探索,并在此基础上开 发出了许多具有智能化的采集机器人,如苹果、葡 萄、草莓、西红柿、黄瓜等采摘机器人。20 世纪 90 年代中期,我国已开展了采集机器人的研发工作, 尽管与国外相比仍有一定的差距,但已有了长足的进步。
我们设计一款柑橘和质量检测分级采摘机器人,为中国农业机器人的发展尽一份力,提供一份思路。
1.2.技术创新
首先,根据中国自身水果产量触出发选择设计柑橘采摘机器人,经过调查,柑橘是中国生产量最大的水果,其次是苹果和犁,结合中国水果生产情况,所以我选择设计柑橘采摘机器人,可以最大程度解决中国果农的需求。其次,柑橘采摘机器人研究时间较短,研究程度较低,被发掘潜力的可能性较大。(原因)
视觉创新:由于果树上的柑橘与叶子和枝干的差异较大,所以设计的柑橘采摘机器人使用使用状态识别识别柑橘,使用颜色识别识别成熟度。使用双摄像头定位来识别柑橘的位置,摄像头高度调节装置识别到果实后,该装置利用电机将摄像头移动到与果实登高处,获取该果实的位置信息,以该装置摄像头为原点,摄像头与柑橘连线为x州建立原坐标系,将该装置摄像头把位置信息通信传给机械臂上的摄像头, 机械臂上的摄像头也建立坐标系,根据传来的信息自己的实时检测高准确度的识别到柑橘位置,并向柑橘移动。
末端执行器创新:末端执行器是机械手的关键部位,主要由夹持装置、驱动装置、切割装置及传感器等组成,按照果实抓取方式可分为夹持式、吸入式、吸持式。华南农业大学的陈燕等设计了单动力源驱动、夹剪一体的适用于荔枝采摘机器人的末端执行器;王毅依据仿生学原理与柑橘物理特性,模仿蛇吞咬捕猎动作设计的末端执行器,魏博设计的欠驱动式柑橘采摘末端执行器该末端执行器选择使用力脱离的方式,该末端执行器根据双连杆机构设计手指,并在手指内 侧贴有硅胶,利用电机驱动齿轮组传导连杆机构驱使手指伸开和闭合,旋转分离果柄。 由于是力脱离的方式,扭拉柑橘时会将果柄从果蒂处拉出,损伤柑橘。本设计机器人为了采摘总体效率的提高,采用剪刀快速剪断,使用简单的剪刀剪短可以减小末端执行器的复杂程度,减小末端执行器的质量,减小机械臂的承重,使重心向下偏移,有利于该机器人的稳定。没有使用夹装置,而是直接使用采用软管道,将剪短的柑橘直接送入收集框,减少了机械臂将柑橘送到收集框动作,减少了时间,大大提高了速率。而且采用软管道保护了果实,如果直接使用机械臂将柑橘丢入收集框,丢入的时候会一定高度,该高度产生的重力势能可能使柑橘破损。
功能补充:根据调查,大部分的柑橘采摘机器人只用于实现柑橘果实的采摘而没有添加其他功能。考虑到柑橘品质的不同会卖出不同的价格,果农们还需要将采摘来的柑橘进行质量分类,将一级果放一起,将二级果放一起...,为了减少果农的成本,该机器人还添加柑橘质量检测并分级功能,执行该功能,机器人将把采摘来的柑橘进行质量检测。
1.3.推广前景
1.解决经济转型
随着我国经济的转型,农村劳动力逐步向其他行业转移,造成了农村劳动力的短缺。因此,农业采摘机器人作为一种有效的农业技术可以高效地 提高农业生产效率,减少劳动力成本,提高农作物采摘质量,并且可在不同的环境条件下运行,为农业生产提供有效的支持。
2.政策大力支持
近年来,我国深入实施党中央国务院提出的“藏粮于地, 藏粮于技”农业战略,加快建设农业强国,推进农业科技现代化。农业生产在数字化、智能化进行了全面升级改造。各 种农业机器人取代传统农业劳作,提高了生产效率。在水果 采摘领域,也有学者、工程师不断进行研究开发各种水果采摘机器人。
第 2 章 问题分析
2.1 问题来源
目前,我国的果树采收工作多为人工操作。在 果树生产中,抽穗是最耗费时间和精力的一个环 节,它占据了整个生产的 40% ,而成本则是超过 50% 。进入 21 世纪,我国人口老龄化问题日益突 出; 而在工业迅速发展的同时,农村劳动力也在逐渐向其他产业转移。因此,农业劳动力紧缺问题日益凸显,导致了农业生产成本不断上升。
2.2 现有解决方案
1.偏向于劳作行走问题,水果定位效率有待提高
许子康老师在论文提出了基于STM32的六足农业仿生机器人研究 ,主要为了解决农业生产中喷雾,施肥,收割 的农业劳作,用仿生的方式解决机器人在劳作区域稳定行走 的问题。孙永芳老师提出 GPS 位置定位功能为保证实时获 取农业采摘机器人的具体位置,用超声波控制机械抓手与水 果距离,实现水果采摘 。但是超声波在实际应用中会受到各种干扰,比如树叶、树枝和水果本身的反射、折射等等, 给距离估算带了不可忽略的误差。闵小翠老师提出,为提 升农业采摘机器人运动协作控制性能,降低机器人碰撞概率,利用 D-H 法优化设计机器人运动协作控制系统防止多 机器人协同工作时碰撞问题,这里主要解决了多机器人同时劳作时行走问题。可以看到目前对提高水果定位的研究不是太多,并且水果采摘机器人的成功定位效率还都有待提高。
2.3 本作品要解决的痛点问题
1.提高水果定位效率:使用双摄像头定位来识别柑橘的位置,摄像头高度调节装置识别到果实后,该装置利用电机将摄像头移动到与果实登高处,获取该果实的位置信息,以该装置摄像头为原点,摄像头与柑橘连线为x州建立原坐标系,将该装置摄像头把位置信息通信传给机械臂上的摄像头, 机械臂上的摄像头也建立坐标系,根据传来的信息自己的实时检测高准确度的识别到柑橘位置,并向柑橘移动。
2.提高水果收集效率:使用简单的剪刀剪短枝干可以减小末端执行器的复杂程度,减小末端执行器的质量,减小机械臂的承重,使重心向下偏移,有利于该机器人的稳定。没有使用夹装置,而是直接使用采用软管道,将剪短的柑橘直接送入收集框,减少了机械臂将柑橘送到收集框动作,减少了时间,大大提高了速率。而且采用软管道保护了果实,如果直接使用机械臂将柑橘丢入收集框,丢入的时候会一定高度,该高度产生的重力势能可能使柑橘破损。
3.完善机器人功能:该机器人还添加柑橘质量检测并分级功能,机器人将把采摘来的柑橘进行质量检测,将采摘来的柑橘进行质量分类,将一级果放一起,将二级果放一起...,为了减少果农的成本。
2.4 解决问题的思路
机械臂上摄像头:
1.获取产品使用所需要的数据集:在开csdn上获取,网址如下:
第 3 章 技术方案.
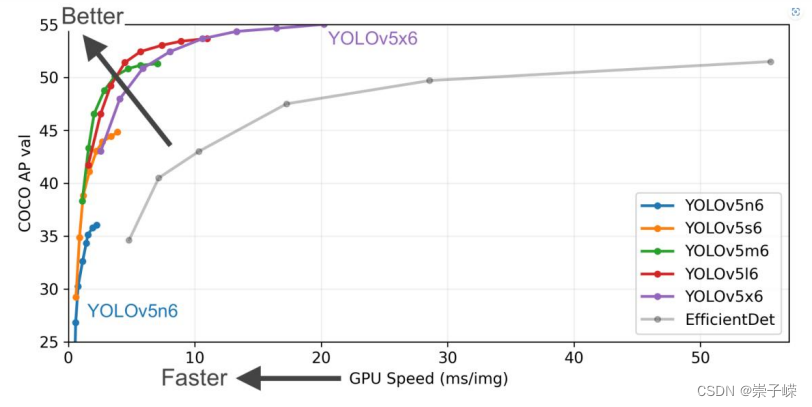
3.1 利用 YOLOv5 进行柑橘目标检测
3.1.1 YOLOv5 的介绍
3.1.2 采集数据集
3.1.3 数据集预处理
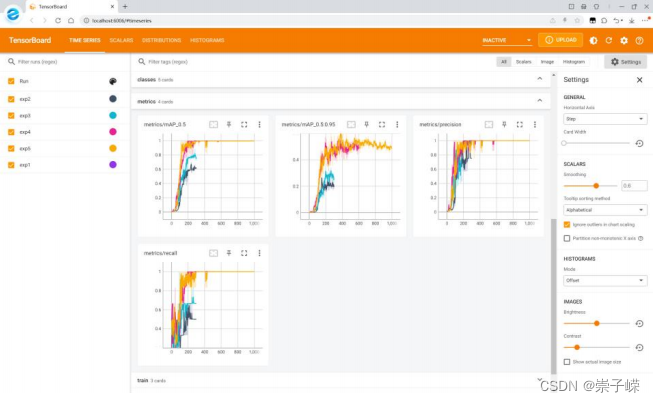
3.1.4 模型选择和训练
3.1.5 模型评估
3.1 利用 Openmv 进行水果目标检测
3.1.1 Openmv的介绍
OpenMV是一款开源、功能强大且低成本的机器视觉模块。其核心采用了STM32F767CPU,并集成了OV7725摄像头芯片。通过高效的C语言实现了核心机器视觉算法,并提供了Python编程接口。用户可以轻松使用Python编写简单的代码,实现诸如寻找色块、人脸检测、眼球跟踪等机器视觉任务。这使得OpenMV在非法入侵检测、产品残次品筛选、固定标志物跟踪等方面具有广泛的应用。
其小巧的设计使得它适用于各种创意产品,例如智能机器人、智能车辆和智能玩具等。同时,OpenMV采用的STM32F427具有丰富的硬件资源,包括UART、I2C、SPI、PWM、ADC、DAC以及GPIO等接口,方便用户扩展外围功能。此外,它还配备了USB接口和TF卡槽,用于连接电脑、进行编程调试以及存储数据。
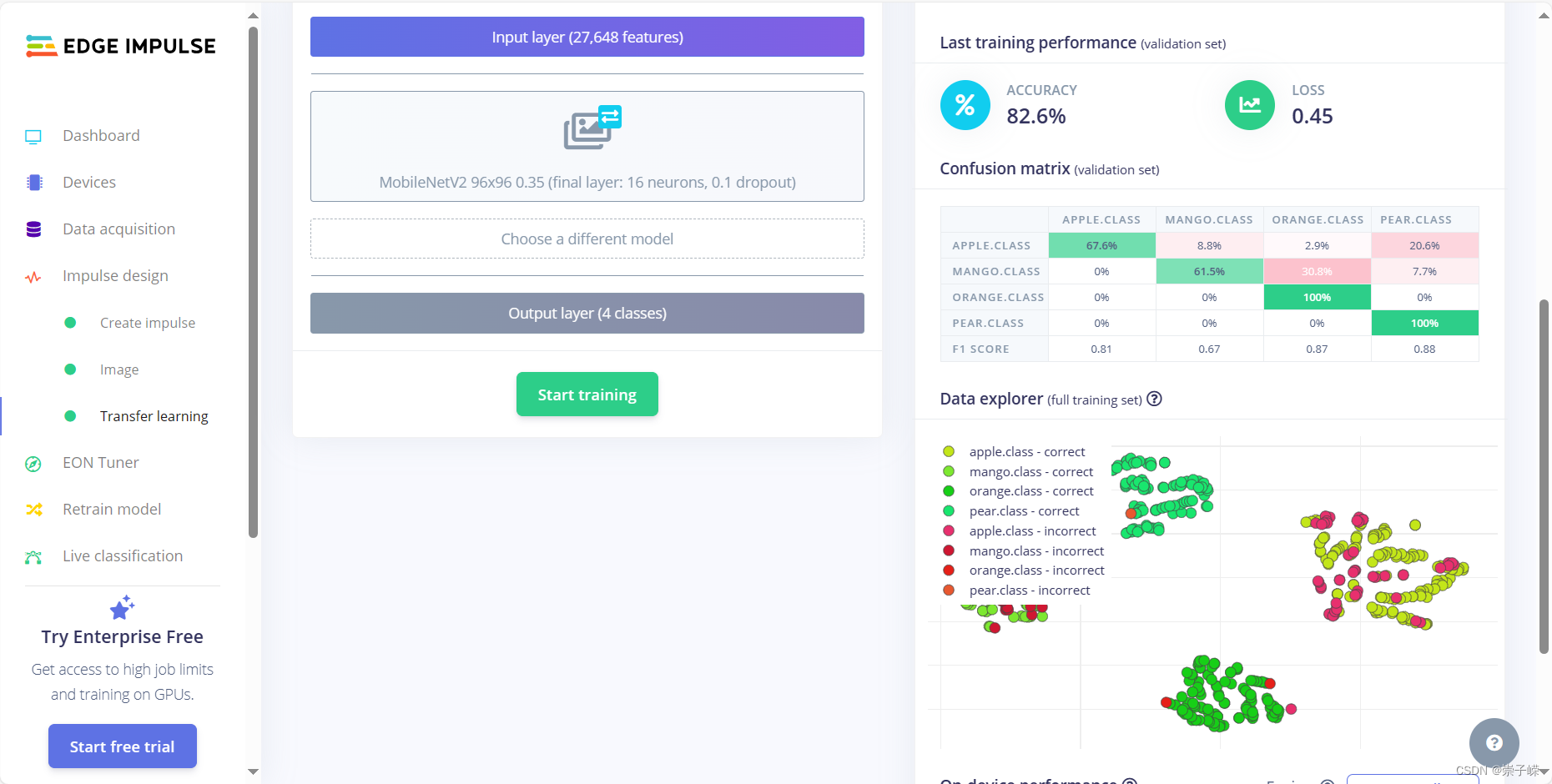
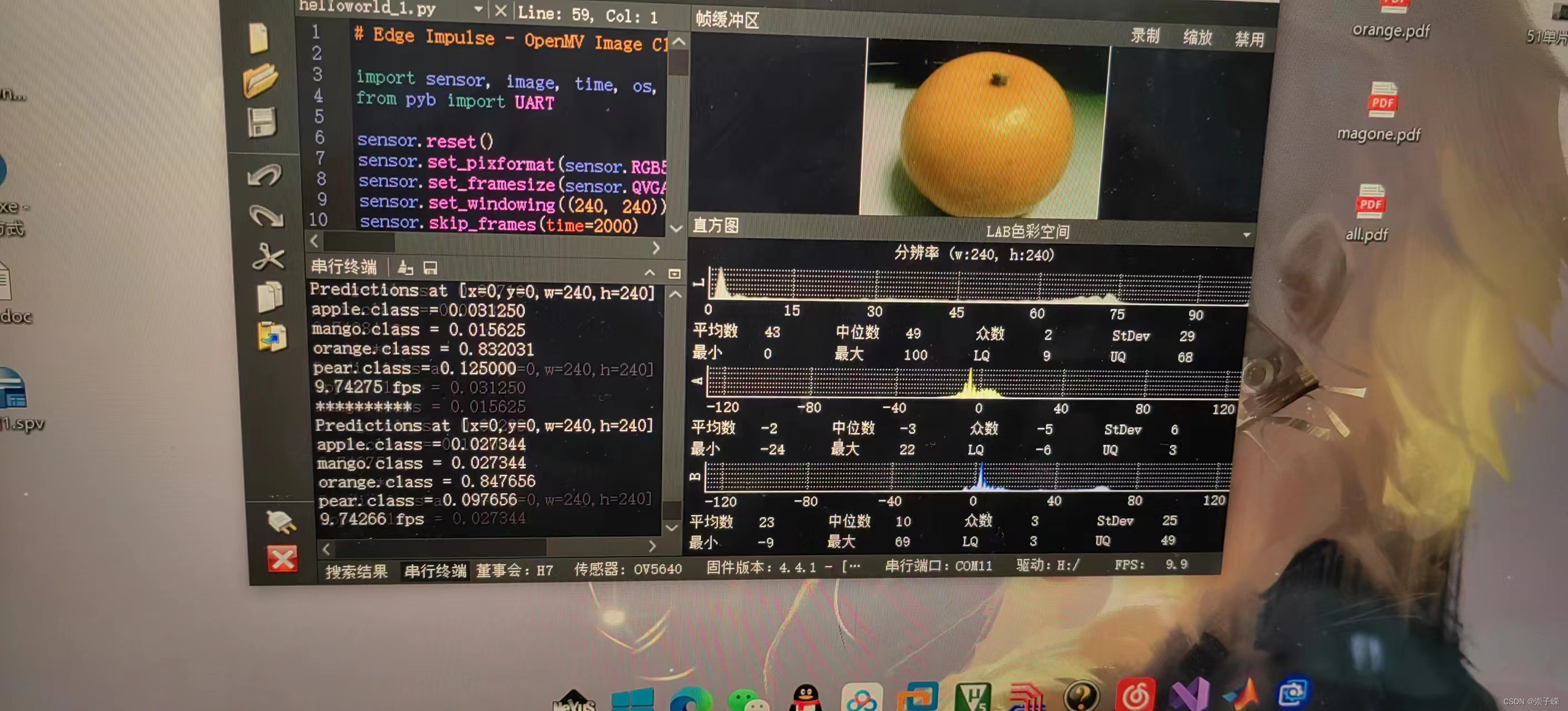
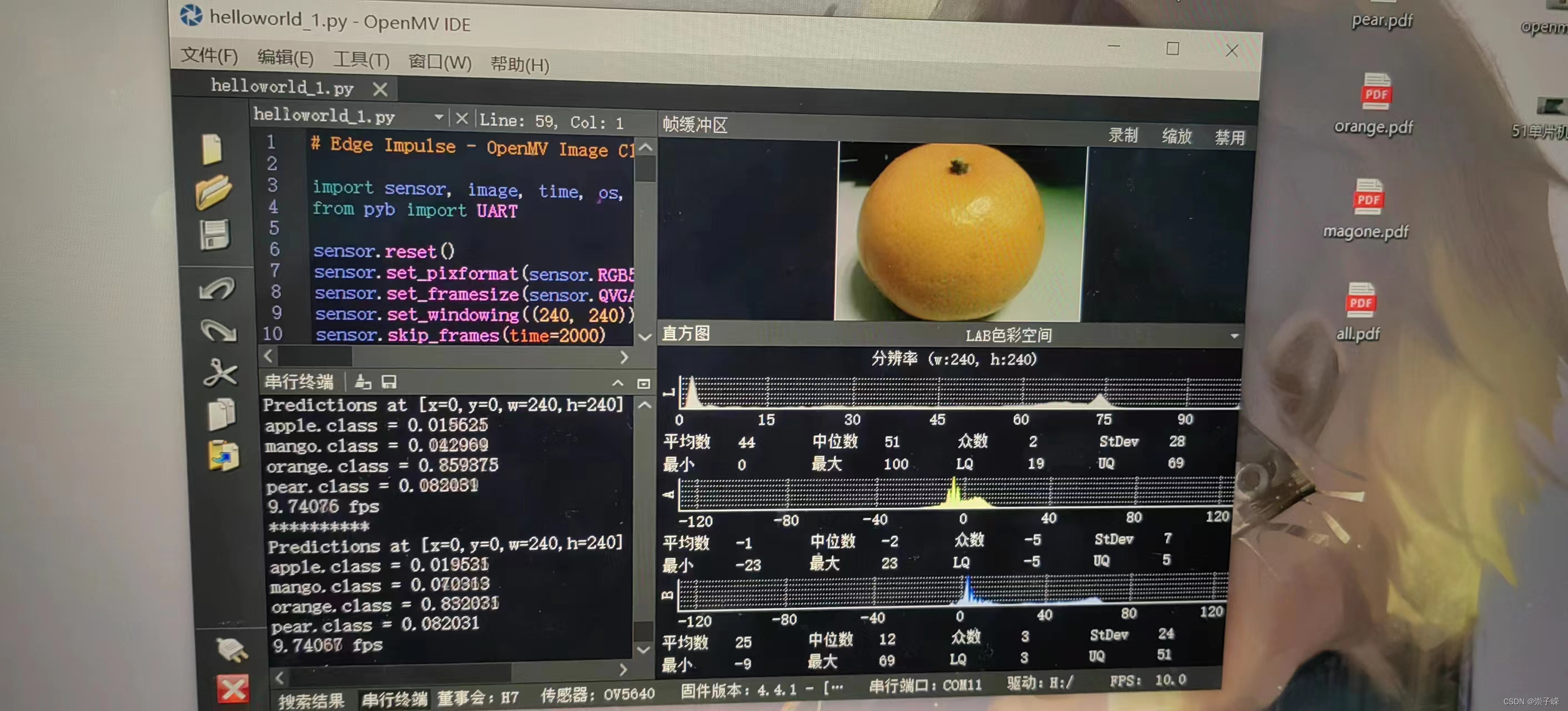
3.1.2 训练检测柑橘模型
1.创建工程
2.导入数据
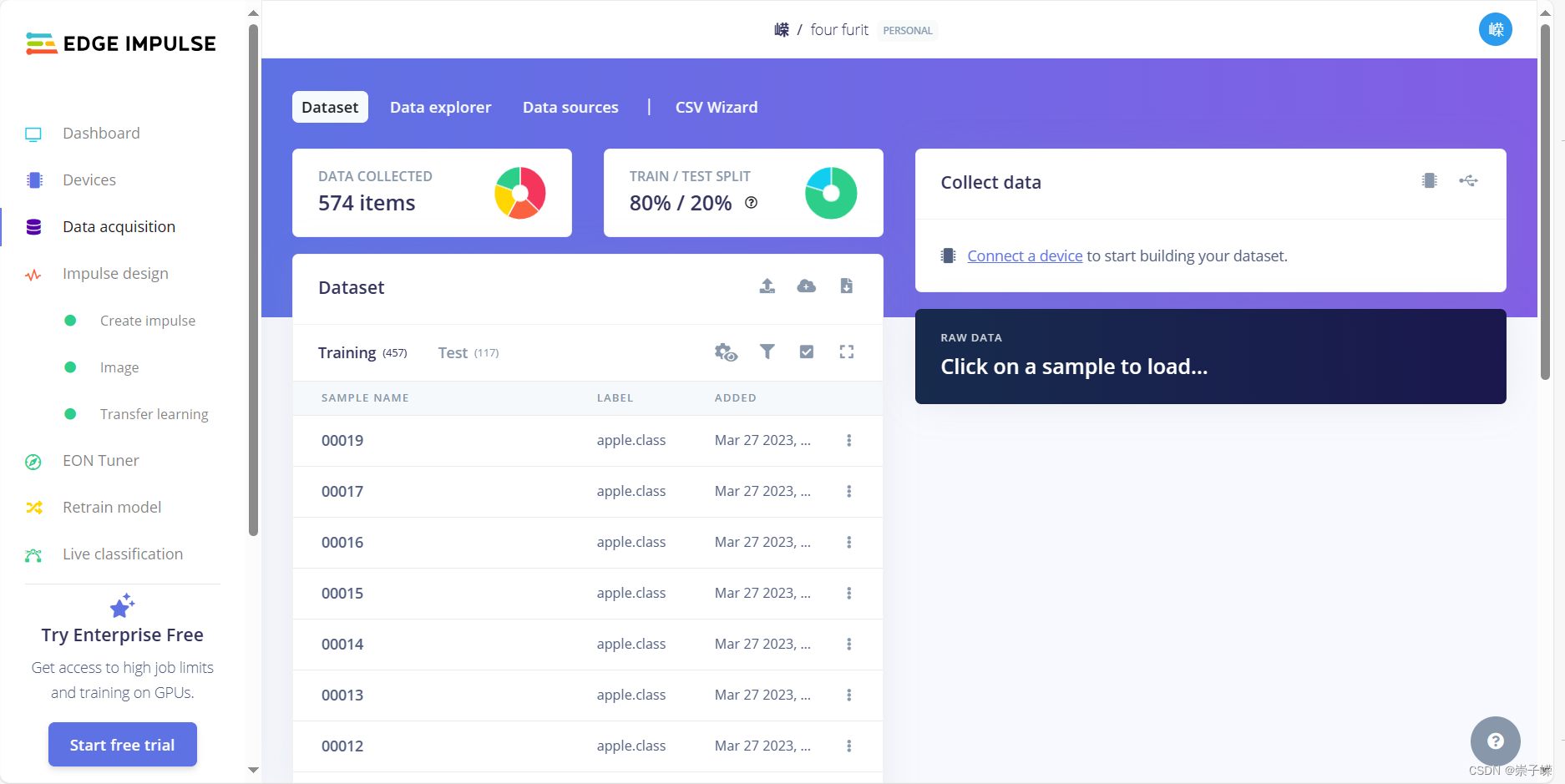
3.模型建立
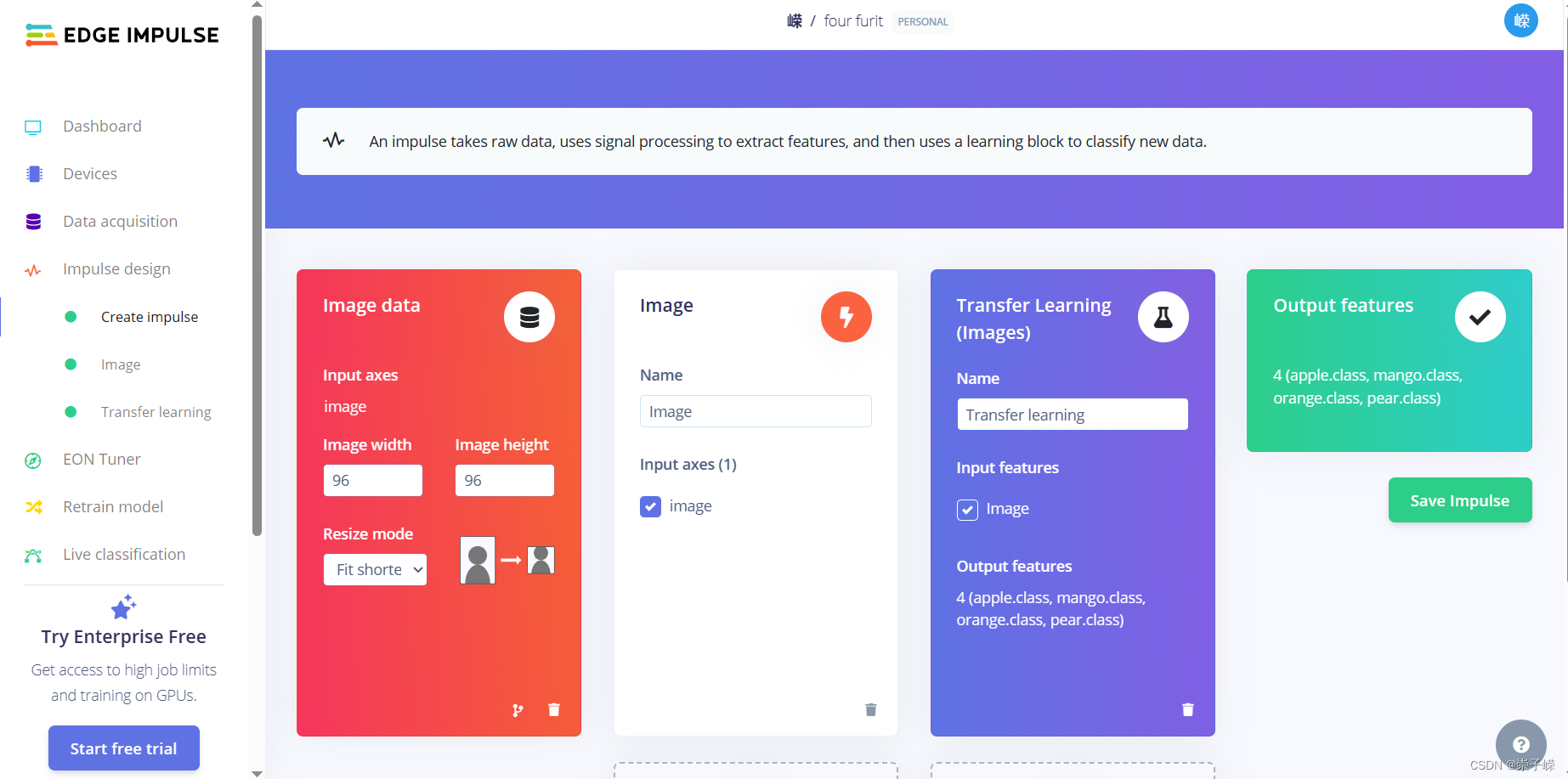
4.图像预处理
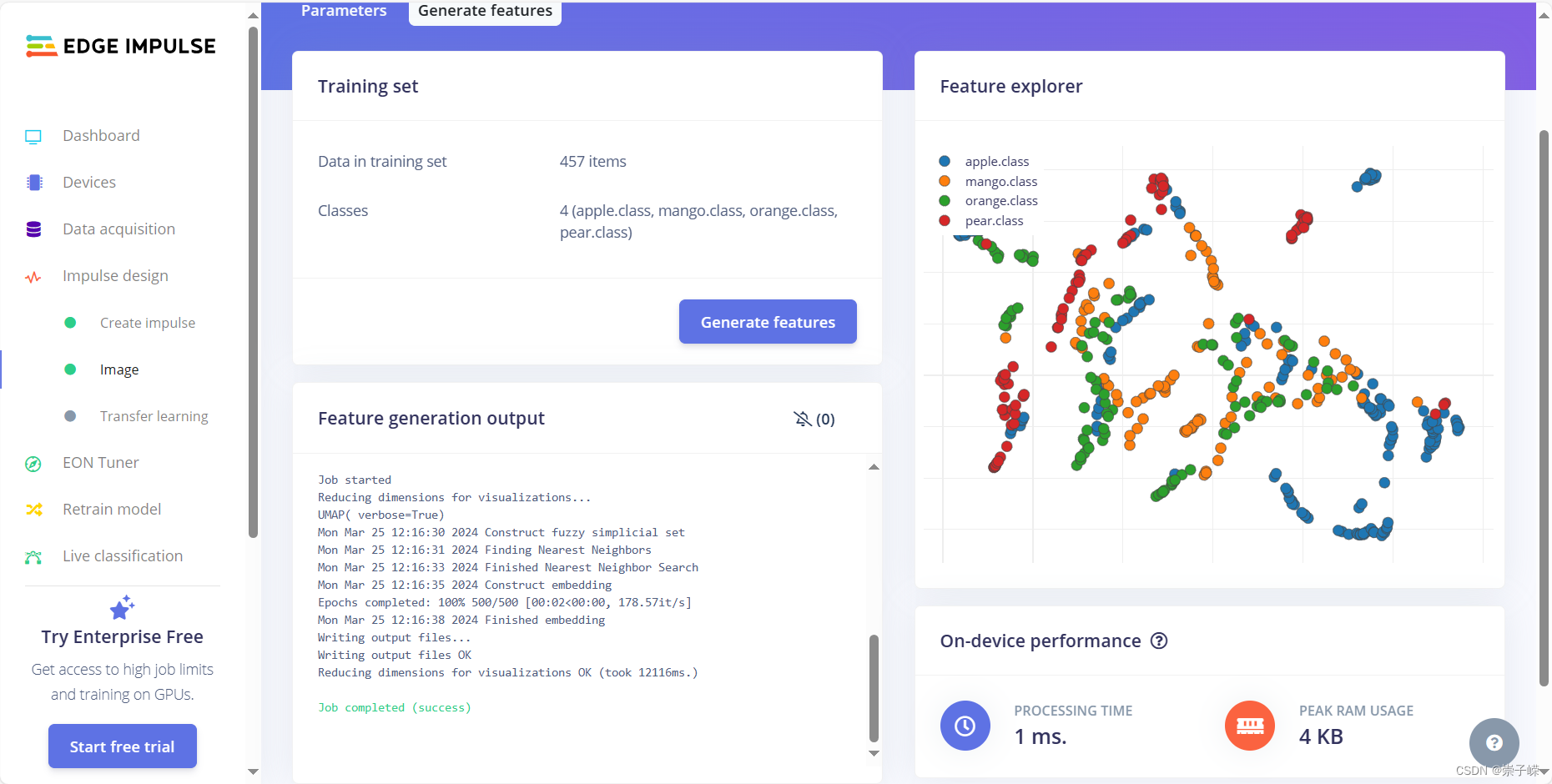
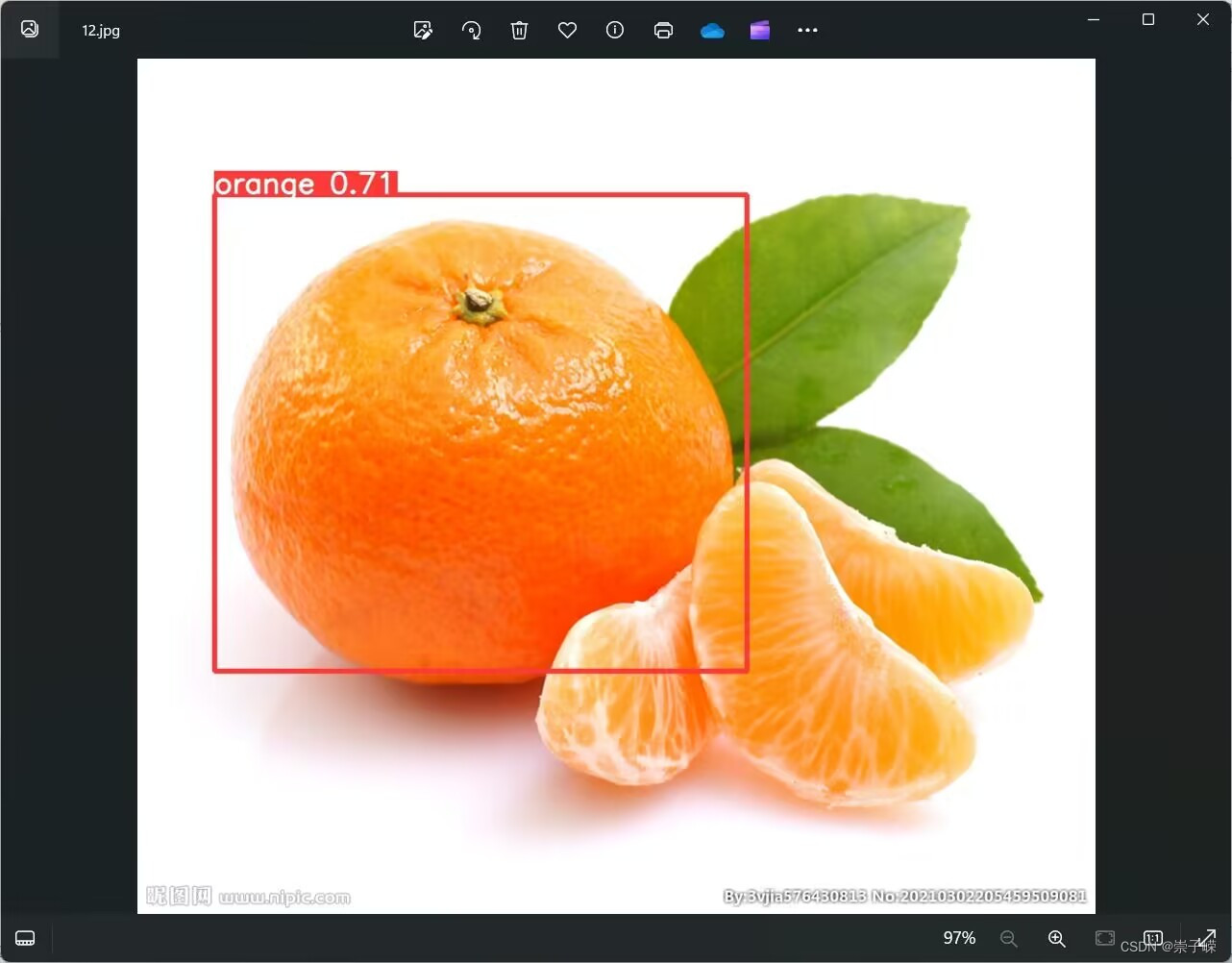
5.训练成果
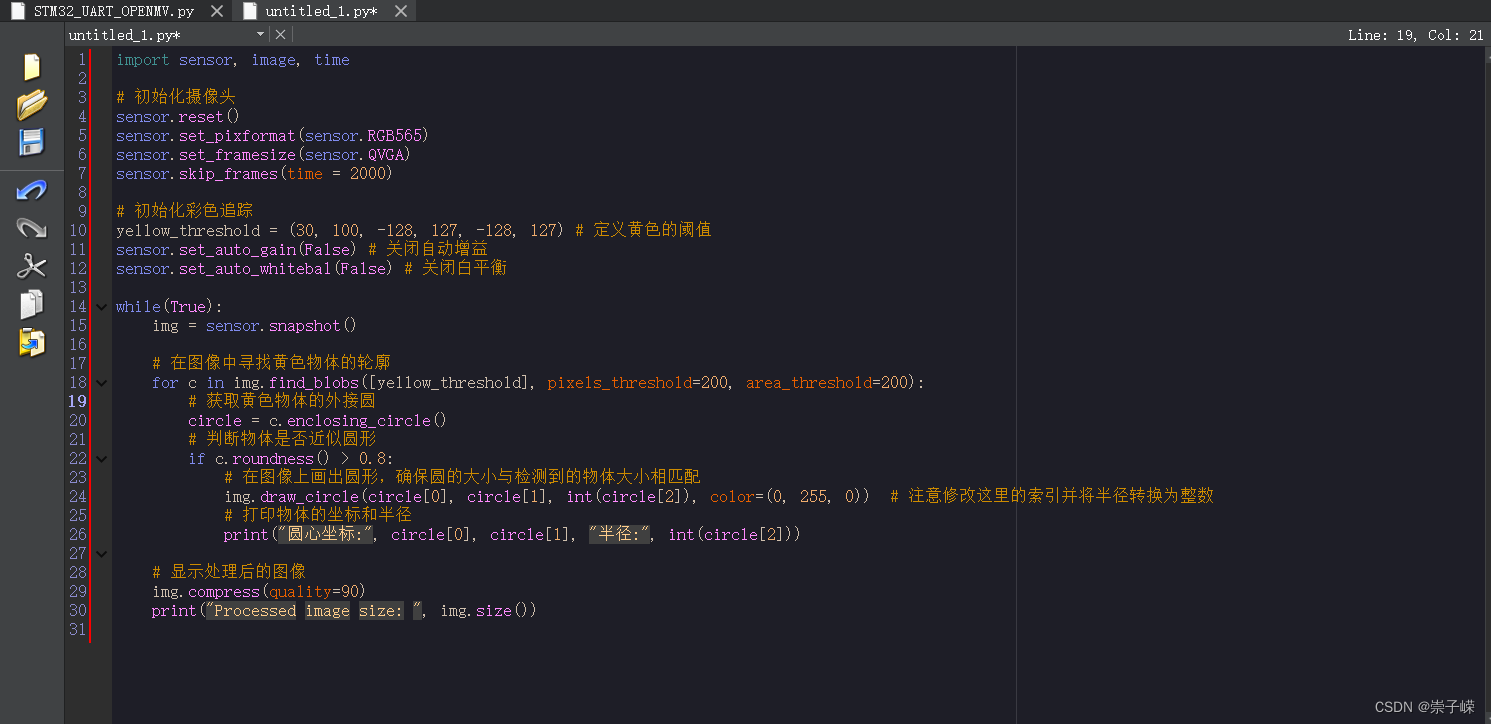
3.1.3 颜色识别检测成熟度
我们利用openmv采用颜色识别柑橘成熟度,柑橘成熟时为橙色,为成熟时为绿色,我们通过颜色识别可以准确正确的的识别到成熟的柑橘。
3.2智能车部分技术实现
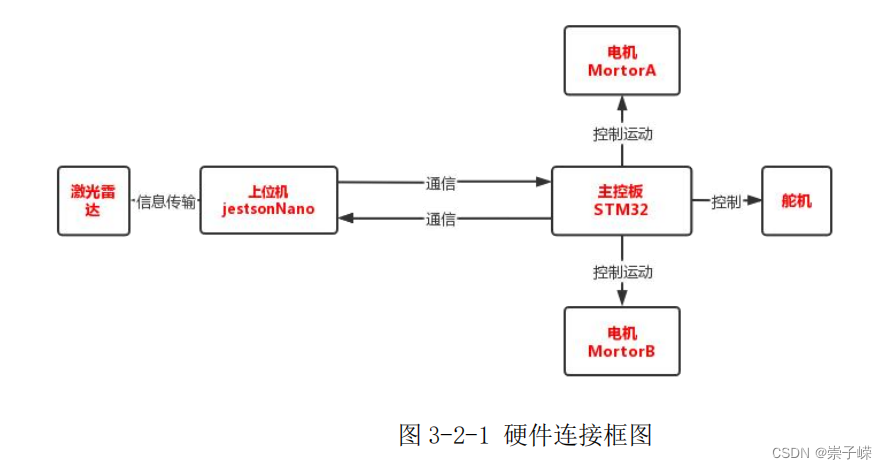
3.2.1 硬件组成
主控板 STM32 通过 MortorA 和 MortorB 俩个接口控制俩个电机的运动,也通过其他接扣控制舵机的运动以及与上位机 jetsonNano 进行通信。智能车车头安装了激光雷达与转接板相连,转接板再与 jestsonNano 连接进行信息传输。小车底部安装了 PS2 手柄接收器,可与 PS2 手柄连接进行控制。智能车安装有四个车轮,两个后轮通过电机驱动进行运动,两个前轮连接了舵机,控制智能车的转向。
3.2.2 软件部分
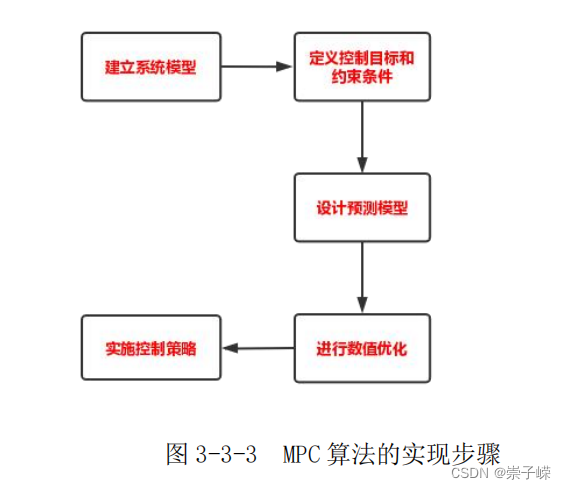
3.2.3 运动控制及优化
3.2.4 激光雷达避障及优化
3.3机械臂部分技术实现
3.3.1 机械臂功能开发
3.3.2 机械臂部署使用
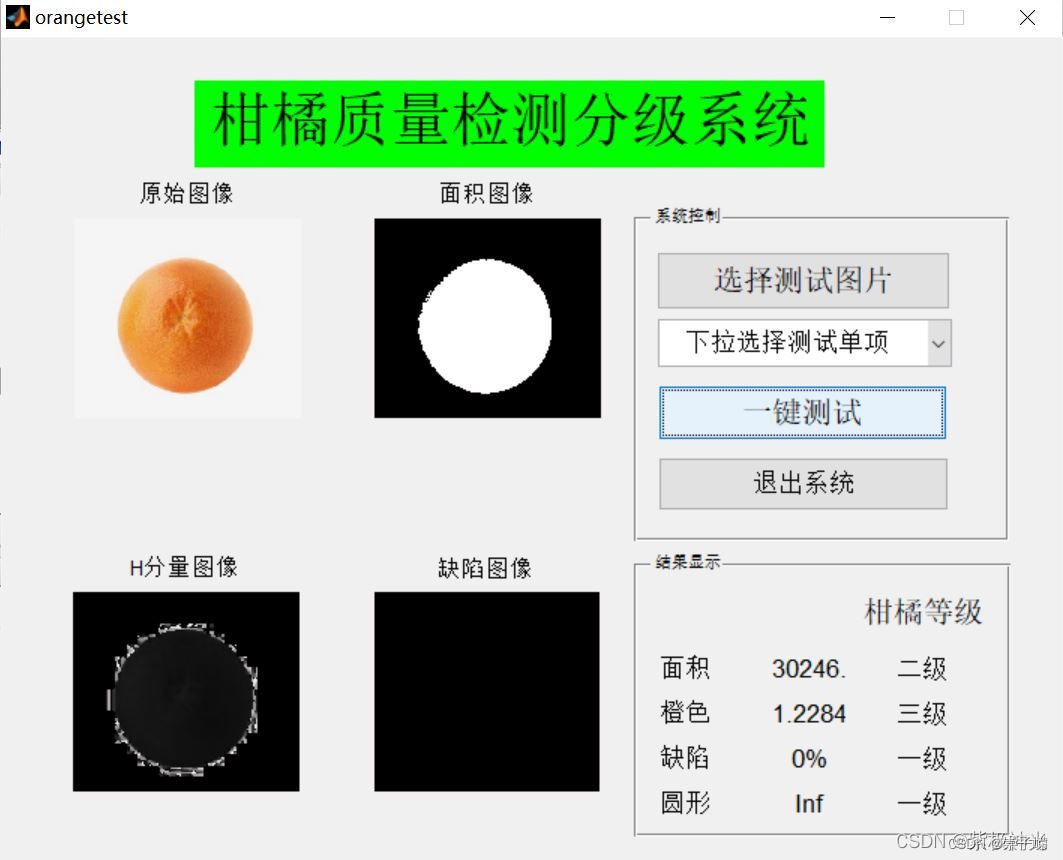
3.4柑橘质量检测和分级
3.4.1图像预处理
系统可以通过摄像头来采集柑橘图像,因为可能由于光线的反射和角度问题,图像可能出现光照不均匀现象。采用了同态滤波增强图像,并使用中值滤波消除噪声来解决问题。为了提高柑橘分级效率,我们只需要对感兴趣区域进行背景分割和特征提取。最后,根据不同角度的柑橘图像信息,对柑橘进行准确分级。
3.4.2 背景分割
为了提取柑橘图像中的轮廓,我们可使用自适应Ostu阈值分割算法,它能自动计算最佳阈值以提取柑橘。另外,泛洪填充算法也很有效,它从一个点开始,逐步填充周围像素,直到封闭区域内的所有像素都被填充为止。填充与背景相近的部分为黑色,突出前景与背景的差异。
3.4.3 特征提取
(1)果径
根据鲜柑橘分级标准,柑橘的果径等于其最大横截面直径。因此,我们使用最小外接圆法来计算柑橘表面二值化图像,从而得到柑橘的果径
(2)着色度
首先,我们将RGB图像转换为HSV图像,然后选择红色的提取范围:H(156~180)、S(43~256)、V(46~255)。通过阈值处理后,统计图像中白色像素点的数量,并按照特定公式计算柑橘的着色度。
(3)柑橘缺陷
柑橘在生长、采摘和运输过程中常受到天气、病害、虫害和碰伤等损害,导致表面出现疤痕。其中,柑橘果锈是一种常见的病害,在中小果园尤其常见。因此,我们将疤痕和果锈的特征参数作为判断柑橘缺陷的依据。由于果梗处颜色较深,容易被误判为疤痕,为了消除这种影响,我们将果梗以外的柑橘区域视为感兴趣区域。
3.4.4 柑橘分级
利用支持向量机(SVM)算法对柑橘进行分级。首先,从柑橘样本中提取果径、着色度、疤痕和果锈等特征参数。接着,将这些特征参数输入SVM决策树分级模型中,通过该模型将柑橘分为一级、二级、三级和四级。
3.5摄像头高度调节装置设计
对于摄像头高度调节装置设计,需要材料:两块平台板,一个电机,一捆线,一个视觉传感器,一个垂直道轨和动滑轮。一块平台板放于导轨的下头用于与车身连接,另外一块平台板放于导轨的上头用于支撑电机,导轨内部放置动滑轮,将视觉传感器装在动滑轮上,使用线将视觉传感器与电机相连,编写代码实现视觉传感器与电机之间的串口通信,将视觉传感器获得的信息传给电机,使电机正转反转,从而调节视觉传感器的高度,使视觉传感器到达想要的高度。

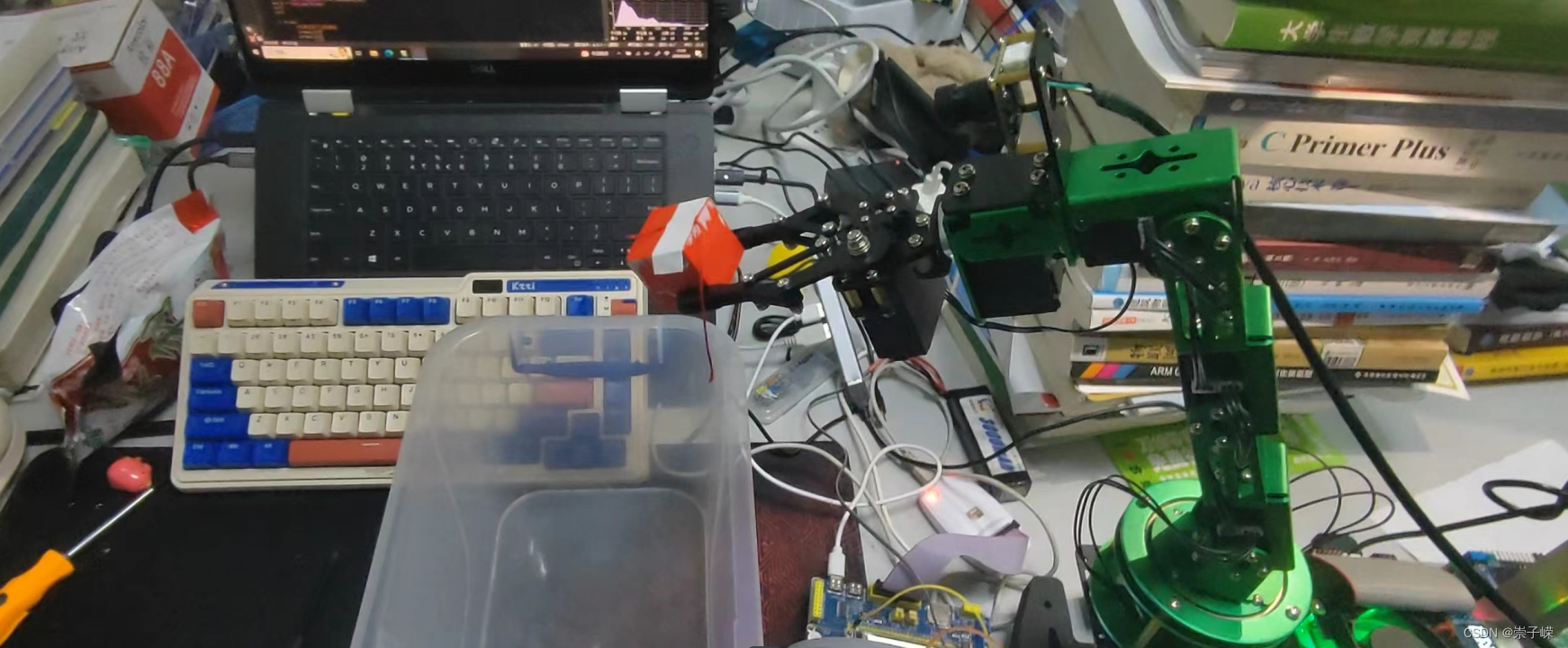
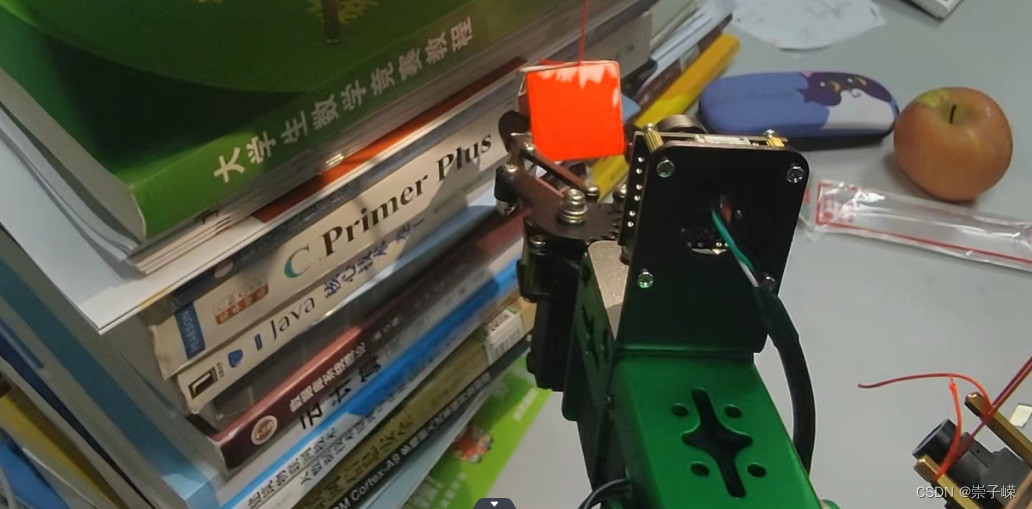
3.6末端执行器设计实现
柑橘的枝条较硬,所以我们采用剪刀进行采摘,不使用扭断法分离,扭断法分离可能使柑橘果皮破碎,使果肉露在外面,影响柑橘的质量。为防止剪短枝条后果实直接脱落,我们采取在剪刀下设计软管道,使果实直接掉入收集框中。我们将设计的剪刀安装到机械臂夹取装置上,在剪刀的正下方设计软管道,从而实现在剪短枝条的同时也实现了收集果实。
第 4 章 系统实现
4.1系统流程框图
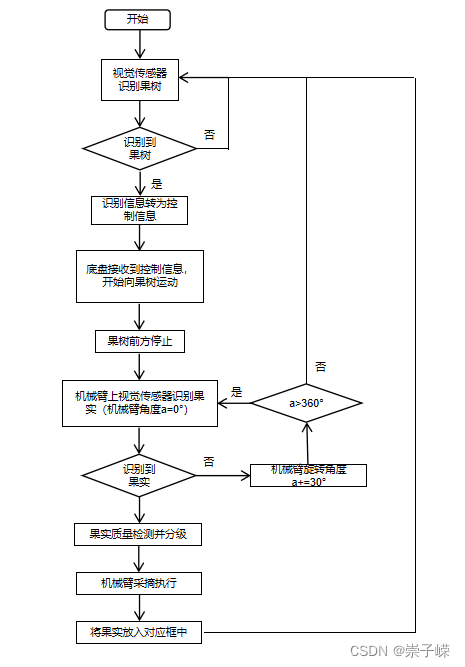
4.2果实检测采摘实现
1.摄像头捕捉到果树时,会利用先进的图像处理和模式识别技术对图像进行分析和识别,以确定果树的位置、规模等信息。一旦检测到果树,系统会立即触发措施。
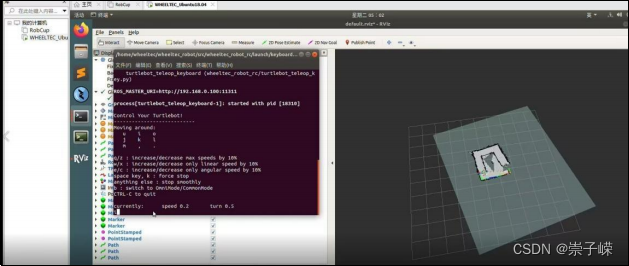
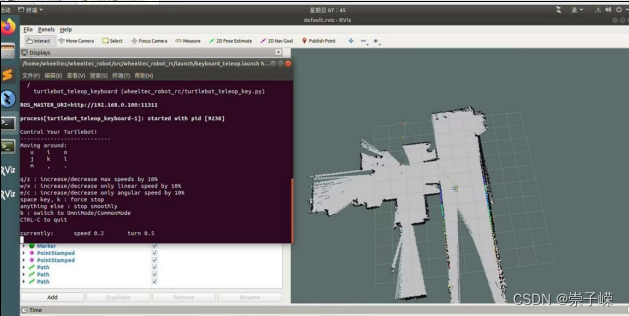
2.机器人在接收到信息后。通过搭载激光雷达、摄像头等传感器,智能车能够实时感知周围环境,构建地图并定位自身位置,从而能够在果园自主规划巡航路径,避免障碍物,准确到达目标区域。这种自主导航和定位技术能够使智能车能够在复杂的果园环境中高效运行。
第 5 章 测试分析.
5.1 目标检测准确性
5.2 SLAM 导航性能
通过在果园环境中进行自主导航和路径规划的测试,评估 SLAM 算法在复杂环境下的导航性能,包括定位的准确性和路径规划的效果。
5.3 机械臂控制精度
第 6 章 作品总结
6.1项目总结.
6.2 作品展望.
参考文献.
[1]王焱清,汤旸,杨光友.面向机器人柑橘采摘的控制系统设计与试验[J].中国农机化学报,2023,44(09):146-153.DOI:10.13733/j.jcam.issn.2095-5553.2023.09.021.
[2]赵敬,王全有,褚幼晖等.农业采摘机器人发展分析及前景展望[J].农机使用与维修,2023,(06):63-70.DOI:10.14031/j.cnki.njwx.2023.06.019.
[3]李志明.基于STM32的农业采摘机器人设计[J].电子制作,2024,32(03):77-80.DOI:10.16589/j.cnki.cn11-3571/tn.2024.03.029.
[4]鲍秀兰,马志涛,马萧杰等.丘陵果园自然环境下柑橘采摘机器人设计与试验[J/OL].农业机械学报,1-13[2024-03-25].http://kns.cnki.net/kcms/detail/11.1964.S.20240205.1745.002.html.
[5]杜俊波,李文正.基于阈值分类器的水果识别系统设计[J].物联网技术,2020,10(12):69-71.DOI:10.16667/j.issn.2095-1302.2020.12.021.
[6]杨洪涛.丘陵果园履带式无人作业平台避障路径规划与跟踪控制研究[D].西南大学,2022.DOI:10.27684/d.cnki.gxndx.2022.000384.
[7]郑涵.柑橘采摘机器人末端执行器设计与分析[D].重庆三峡学院,2022.DOI:10.27883/d.cnki.gcqsx.2022.000048.

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)