RobotStudio 6.08 工业机器人模拟焊接工作站的构建
一、项目概述
本项目基于 RobotStudio 6.08 软件构建工业机器人模拟焊接工作站,实现从工作站布局设计、机器人系统配置、多坐标系标定到焊接轨迹自动生成的全流程落地。项目核心目标是掌握离线编程技术在焊接场景的应用,验证虚拟仿真与实际生产的一致性,为工业现场部署提供技术参考。
二、项目进展跟踪
|
里程碑 |
是否达成 |
完成描述 |
耗时 |
核心资源 |
|
工作站基础构建 |
是 |
完成空白项目创建、机器人与外围设备布局、CAD 模型导入 |
8h |
IRB 2600-20/1.85 机器人模型、焊接工装 STEP 文件 |
|
机器人系统配置 |
是 |
成功创建 IRC5 虚拟控制器,完成机械单元关联与 IO 信号配置 |
6h |
RobotWare 6.08 系统镜像、控制器配置手册 |
|
多坐标系标定 |
是 |
完成 Base、Tool、Workobject 坐标系创建与验证 |
4h |
标定工具、工件基准点数据 |
|
焊接轨迹编程 |
是 |
实现直线 / 圆弧焊接轨迹生成,完成起弧 / 收弧逻辑编写 |
10h |
RAPID 编程手册、焊接工艺参数库 |
|
仿真调试优化 |
是 |
解决轨迹干涉与姿态异常问题,仿真成功率达 100% |
5h |
仿真分析器、路径优化工具 |
三、核心模块实现(含关键步骤 + 代码)
(一)工业机器人工作站构建
核心目标:搭建与实际产线一致的虚拟环境,确保设备布局合理性。
- 关键步骤:
关键截图说明: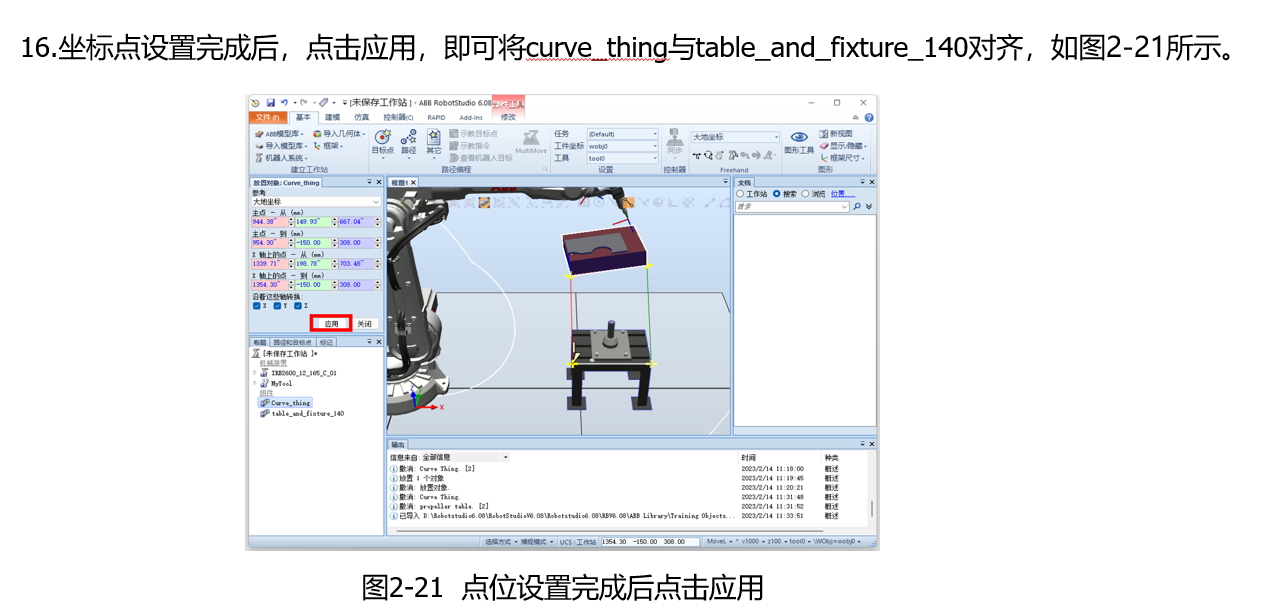
图 1:框架法放置变位机步骤
(操作路径:右键变位机模型 → 放置 → 框架法 → 选择 Base 框架 → 应用)
图 2:工作站完整布局(含机器人、变位机、工装夹具的空间关系)
- 新建空白项目:File → New → Blank project,手动指定控制器版本为 RobotWare 6.08(避免现场部署版本不兼容)
- 导入核心设备:从 Library 搜索 “IRB 2600-20/1.85” 机器人(选择 IRC5 Standard Controller 兼容版),拖入后通过Ctrl+Shift调整 Z 坐标至 0,确保底座贴合地面
- 添加外围设备:导入焊接变位机(IRBP 260)与工装夹具 CAD 模型(STEP 格式),使用 “框架法” 完成精准定位(图 1)
- 配置基础环境:启用自动保存(10 分钟间隔),创建 Base 坐标系(Z 轴朝上,X 轴指向进料方向)
- 遇到的困难及解决方法:
- 问题:导入旧项目模板导致控制器类型不匹配,报错 “Controller type mismatch”
- 解决:放弃预设模板,严格从零新建空白项目,提前在Set controller version中指定与现场一致的版本号
(二)工业机器人系统构建
核心目标:创建可运行的虚拟控制系统,实现设备协同。
- 关键步骤:
关键截图说明: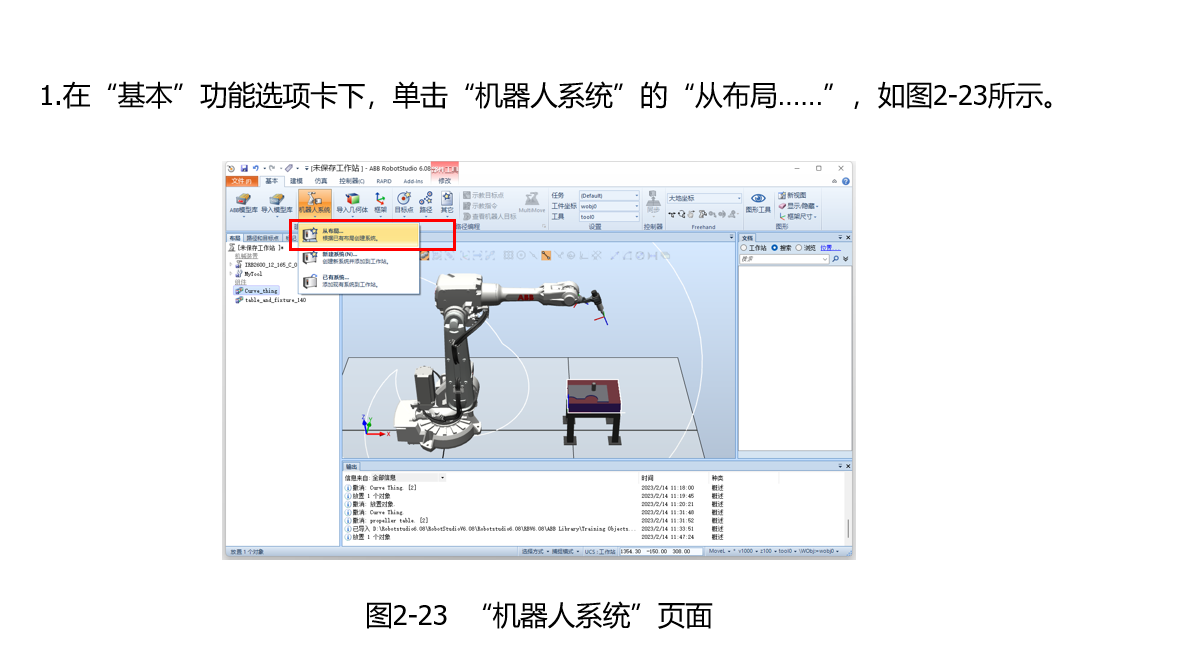
图 3:从布局创建系统流程(基本 → 机器人系统 → 从布局)
图 4:控制器启动成功状态(状态栏显示 “Controller running”)
-
- 添加虚拟控制器:Controller → Add Controller → Virtual controller → IRC5,命名为 “MainController”
-
- 关联机械单元:右键机器人 → Mechanical unit → Change mounting,将机器人挂载至直线导轨滑块
-
- 配置 IO 信号:在Configuration → I/O System中添加数字输出信号do_WeldStart(焊接启动)、do_WeldStop(焊接停止),数字输入信号di_WeldComplete(焊接完成)
-
- 启动系统:点击控制器状态栏 “Start”,确认状态变为绿色(系统正常运行)
- 核心 RAPID 指令(系统初始化):
MODULE SystemInit
PROC main()
Reset do_WeldStart; // 复位焊接启动信号
Reset do_WeldStop; // 复位焊接停止信号
WaitUntil di_SystemReady=1; // 等待系统就绪
MoveJ home, v500, z50, tool0; // 机器人回原点
SetDO do_WeldReady, 1; // 置位焊接就绪信号
ENDPROC
ENDMODULE
(三)工业机器人坐标系构建
核心目标:确保 TCP(工具中心点)定位精度,为轨迹编程提供基准。
- 关键步骤:
关键截图说明: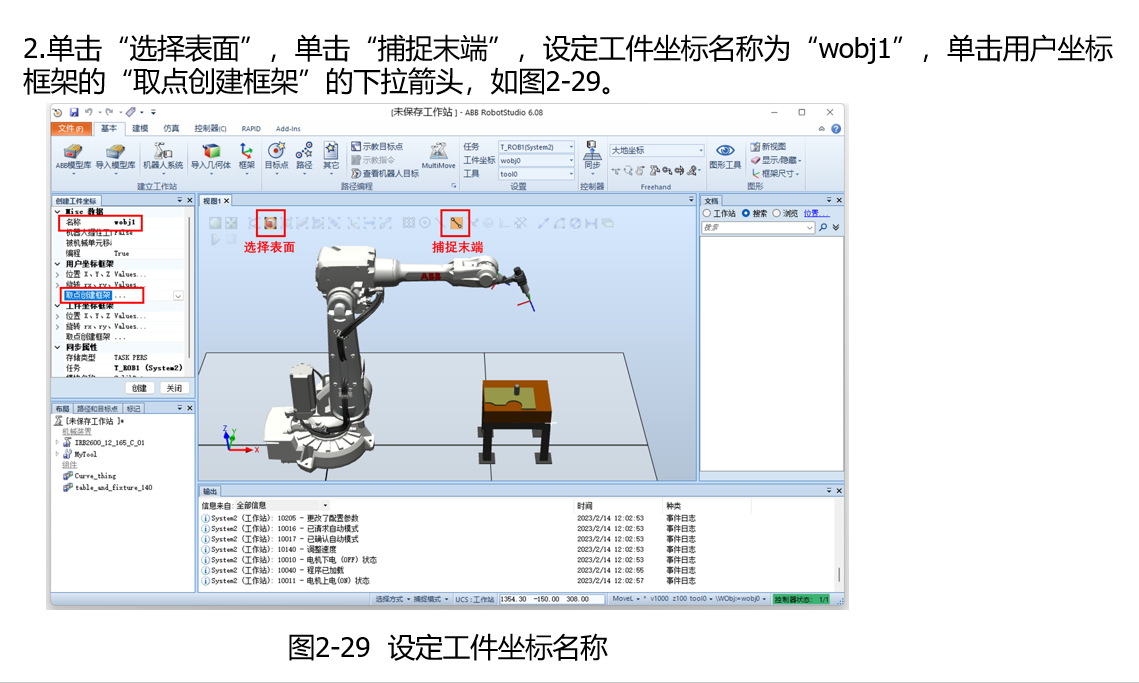
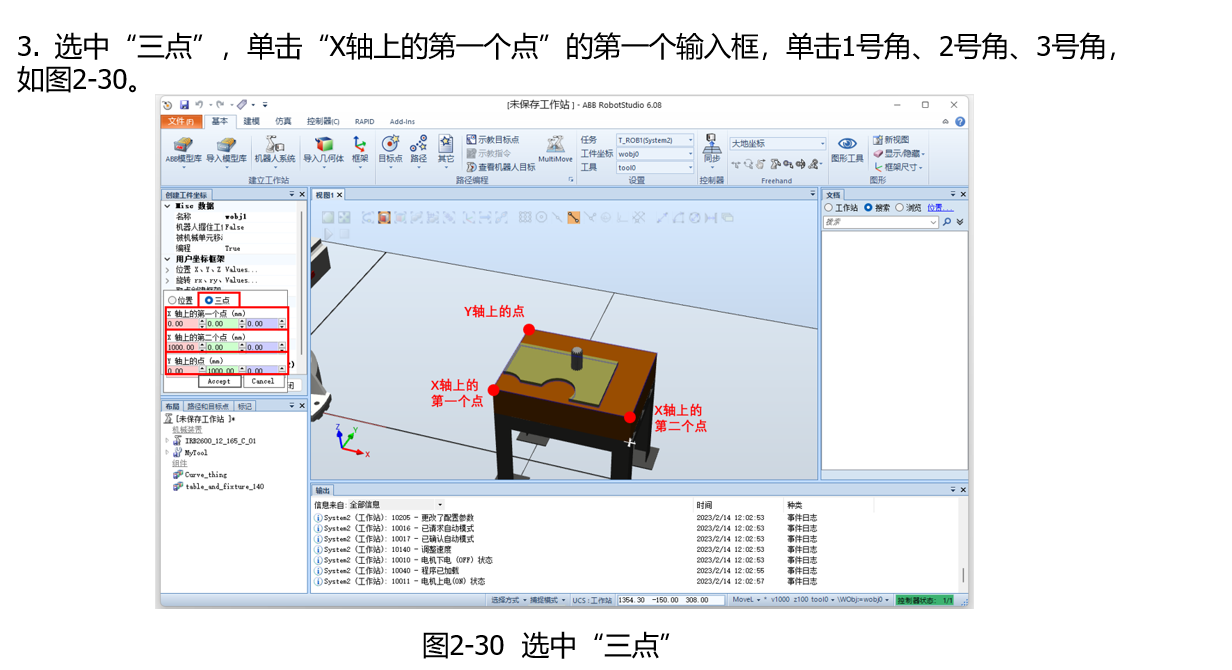
图 5:Tool 坐标系 Z 轴方向设定(通过 “工具方向助手” 调整)
图 6:Workobject 坐标系标定完成后的验证界面
- Base 坐标系(工作站基准):右键工作区 → Create → Frame → Base frame,以产线原点为基准点
- Tool 坐标系(焊枪工具):采用 “四点法” 标定,Z 轴指向焊枪喷嘴方向,X 轴沿焊枪轴线前端(图 5),填写工具质量(2.5kg)与重心参数
- Workobject 坐标系(工件基准):基本 → 其他 → 创建工件坐标,选取工件 3 个基准点,自动生成坐标系 Wobj1
- 遇到的困难及解决方法:
- 问题:仅用三点法标定 Tool 坐标系后,焊接轨迹出现 ±3mm 偏移
- 解决:补充 X 轴方向定义,基于焊枪实际结构调整 Orientation 参数,启用 “动态负载” 仿真选项,偏差缩小至 ±0.5mm 内
(四)工业机器人运动轨迹创建
核心目标:生成符合焊接工艺要求的连续轨迹,包含起弧、焊接、收弧全流程。
- 关键步骤:
核心 RAPID 指令(焊接轨迹程序):
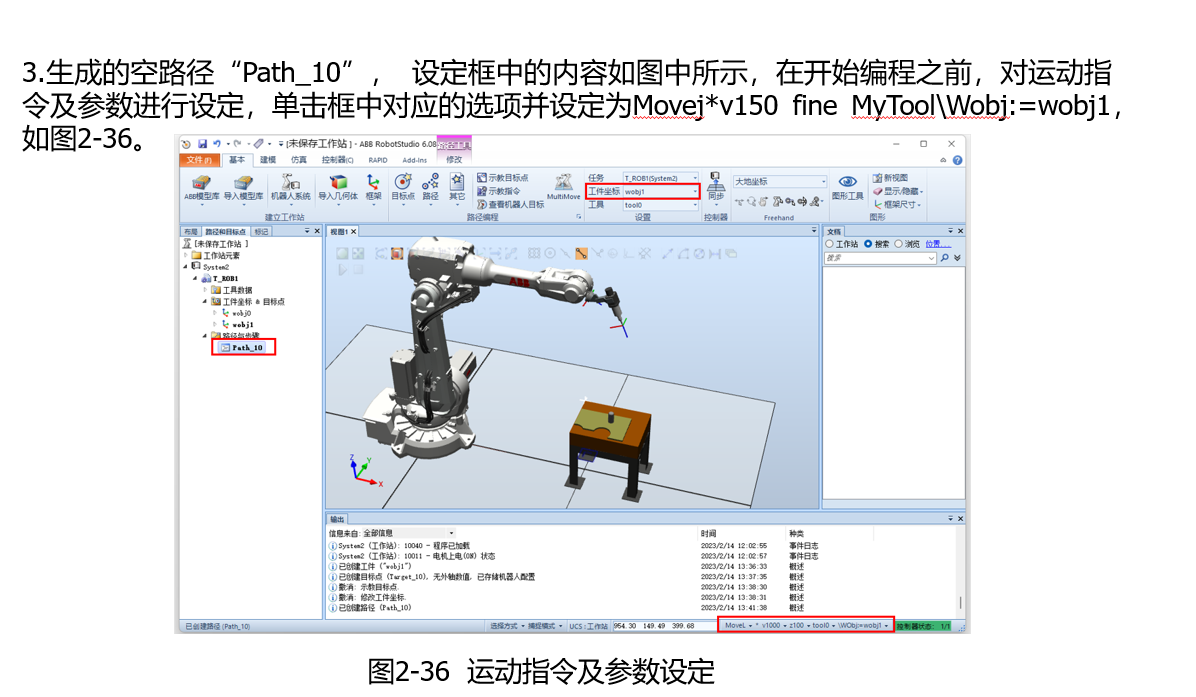
- 绘制焊缝路径:基于工件 CAD 模型的焊缝曲线,使用Path → Auto Path自动生成目标点
- 轨迹类型配置:直线焊缝用MoveL指令,圆弧焊缝用MoveC指令,设置焊接速度 v50(50mm/s)
- 焊接逻辑编写:集成起弧(ArcLStart)、收弧(ArcLEnd)指令,添加 IO 信号联动
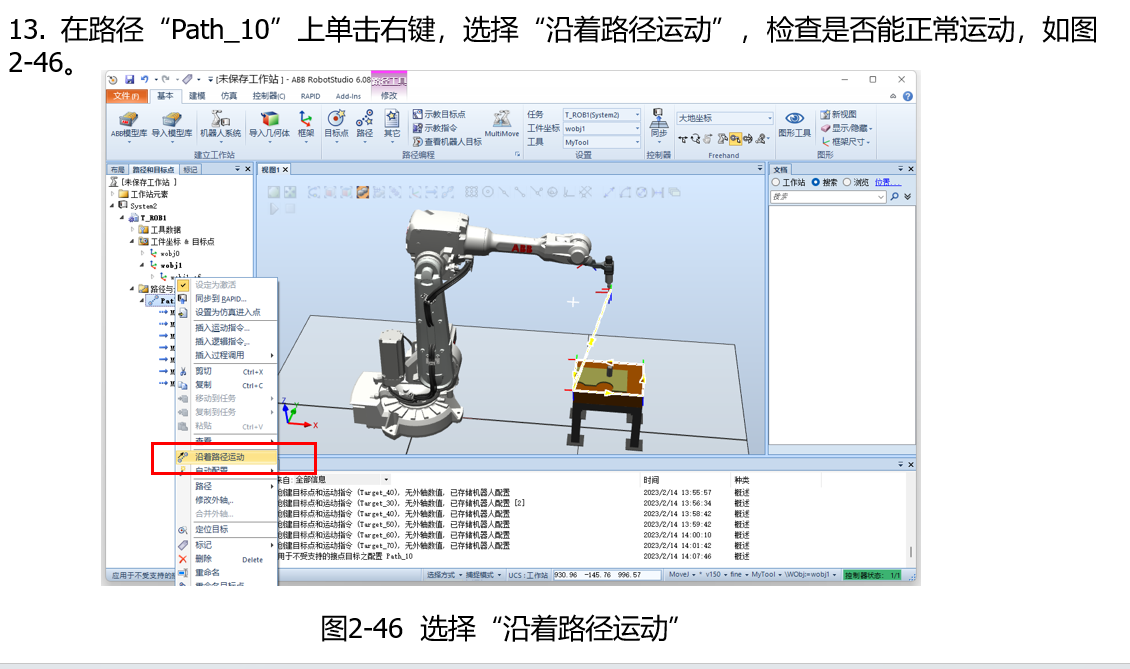
- 仿真验证:启用 “碰撞检测”,运行仿真分析器,优化奇异点姿态
MODULE WeldProgram
! 焊接工艺数据定义
DATA welddata weld1:=['WeldGun', 220, 15, 0.8]; // 电压220V,电流150A,速度0.8mm/s
DATA robtarget pWeldStart:=[[500, 300, 200],[1,0,0,0],[0,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
DATA robtarget pWeldMid:=[[600, 300, 200],[1,0,0,0],[0,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
DATA robtarget pWeldEnd:=[[700, 400, 200],[1,0,0,0],[0,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
PROC WeldMain()
MoveJ Offs(pWeldStart, 0, 0, 50), v200, z50, tool0; // 快速移动至焊缝上方50mm
ArcLStart pWeldStart, v50, weld1, fine; // 起弧,进入焊接模式
MoveC pWeldMid, pWeldEnd, v50, weld1, fine; // 圆弧焊接轨迹
ArcLEnd Offs(pWeldEnd, 0, 0, 50), v50, weld1, fine; // 收弧,退出焊接区域
SetDO do_WeldComplete, 1; // 置位焊接完成信号
ENDPROC
ENDMODULE
关键截图说明:
图 7:自动路径生成界面(选择焊缝曲线后生成目标点)
图 8:焊接轨迹仿真运行效果(绿色线条为实际运行路径)
- 遇到的困难及解决方法:
- 问题:圆弧轨迹运行时机器人姿态突变,出现关节超限
- 解决:在MoveC指令前添加ConfJ\Off关闭关节限制,调整中间点 pWeldMid 的姿态参数,确保运动学解算唯一
- 问题:起弧后焊接信号无响应
- 解决:检查welddata数据结构,补充缺失的焊接工艺参数,确保ArcLStart指令与 IO 信号联动逻辑正确
四、个人心得
- 版本一致性是关键:控制器版本、RobotWare 版本、机器人模型版本必须严格匹配,否则会出现兼容性问题,建议在项目初期就明确所有版本参数,避免后期返工。
- 坐标系标定不能省:Tool 坐标系的 Z 轴方向直接影响焊接角度,Workobject 坐标系的基准点精度决定轨迹偏移量,建议采用 “三点法 + 方向校准” 的组合方式,同时通过实际测量验证仿真精度。
- RAPID 编程注重逻辑闭环:焊接场景需关注起弧 / 收弧的信号联动、轨迹速度与工艺参数的匹配,建议将工艺数据单独定义为welddata类型,便于后期批量修改。
- 仿真调试要全面:不仅要验证轨迹准确性,还要开启碰撞检测、关节超限检查、周期时间分析,提前发现现场可能出现的问题,离线编程的核心价值就在于 “提前规避风险”。
- 文档积累很重要:项目过程中要记录关键步骤的截图、报错信息及解决方案,形成个人知识库,后续遇到类似问题可快速复用,同时也为团队协作提供参考。
五、版权声明
本文所有操作步骤、代码示例均基于 RobotStudio 6.08 官方文档及个人实战总结,部分参考资料已标注引用来源(CSDN 文库相关文献)。如需转载,请注明原文链接及作者信息,严禁商业用途未经授权盗用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 7
7 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)