机器人轨迹规划与工作空间求解
Delta并联机器人轨迹规划工作空间求解正逆解
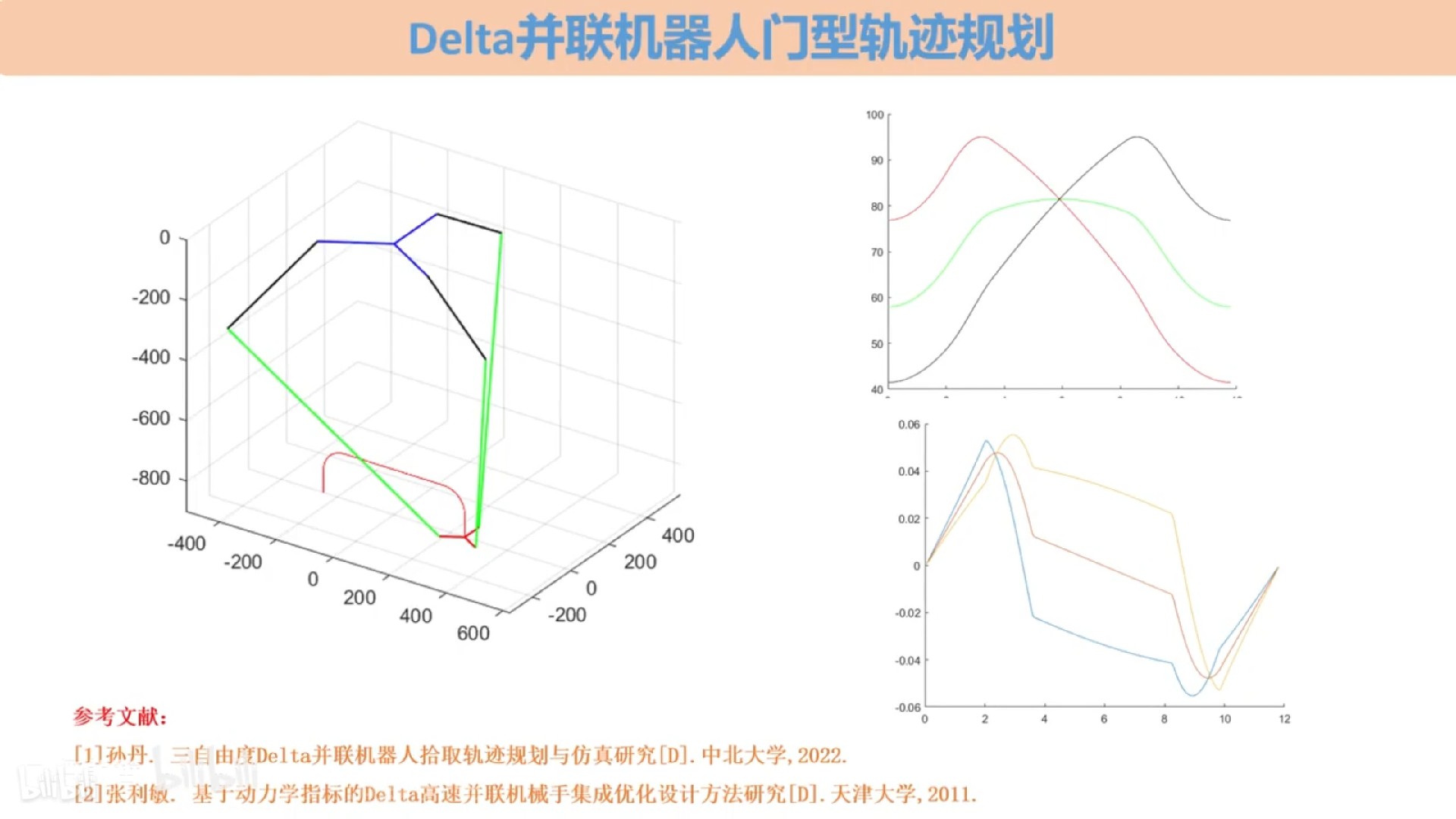
今天咱们来聊聊Delta并联机器人的轨迹规划和工作空间求解,顺便撸点代码,看看怎么搞正逆解。先说说Delta机器人,这家伙在工业上用得挺多,尤其是高速抓取和装配的场景。它的结构简单,三个臂膀,末端有个平台,动起来特别灵活。
首先,咱们得知道Delta机器人的工作空间是啥。简单说,就是末端执行器能到达的所有点的集合。求解工作空间,其实就是找出这些点的范围。这里有个关键点,就是正逆解。
正解嘛,就是从关节角度算出末端的位置。逆解就是从末端位置反推出关节角度。听起来简单,但实际操作起来,还是有点小复杂的。
咱们先来看看正解的代码实现。假设我们有三根臂膀,每根臂膀的长度都是L,关节角度分别是theta1, theta2, theta3。那么,末端的位置(x, y, z)可以这样算:
import numpy as np
def forward_kinematics(theta1, theta2, theta3, L):
x = L * (np.cos(theta1) + np.cos(theta2) + np.cos(theta3)) / 3
y = L * (np.sin(theta1) + np.sin(theta2) + np.sin(theta3)) / 3
z = L * np.sqrt(3) / 3 * (np.sin(theta1) + np.sin(theta2) + np.sin(theta3))
return x, y, z这个函数就是正解的核心代码。输入三个关节角度和臂长,输出末端的位置。简单吧?不过,这只是个简化模型,实际应用中还要考虑更多因素,比如臂膀的偏移、关节的限制等等。
接下来,咱们看看逆解。逆解就是从末端位置反推出关节角度。这个稍微复杂点,因为有时候会有多解,甚至无解的情况。假设我们已知末端的位置(x, y, z),那么关节角度可以这样算:
def inverse_kinematics(x, y, z, L):
theta1 = np.arctan2(y, x) - np.arccos((x**2 + y**2 + z**2) / (2 * L * np.sqrt(x**2 + y**2)))
theta2 = np.arctan2(y, x) + np.arccos((x**2 + y**2 + z**2) / (2 * L * np.sqrt(x**2 + y**2)))
theta3 = np.arctan2(z, np.sqrt(x**2 + y**2))
return theta1, theta2, theta3这个函数就是逆解的核心代码。输入末端的位置和臂长,输出三个关节角度。不过,这个代码也是个简化模型,实际应用中还要考虑更多细节,比如关节的限制、多解的情况等等。
最后,咱们来说说轨迹规划。轨迹规划就是让机器人的末端按照我们设定的路径移动。这个路径可以是直线、圆弧,也可以是更复杂的曲线。轨迹规划的核心就是插值,就是在路径上取一系列点,然后让机器人依次到达这些点。
这里有个简单的直线插值代码:
def linear_interpolation(start, end, steps):
trajectory = []
for i in range(steps):
t = i / (steps - 1)
x = start[0] + t * (end[0] - start[0])
y = start[1] + t * (end[1] - start[1])
z = start[2] + t * (end[2] - start[2])
trajectory.append((x, y, z))
return trajectory这个函数就是直线插值的核心代码。输入起点、终点和步数,输出一系列插值点。然后,我们就可以用逆解函数,把这些插值点转换成关节角度,让机器人依次到达这些点。
好了,今天就聊到这里。Delta机器人的轨迹规划和工作空间求解,其实还有很多细节可以探讨,比如优化算法、碰撞检测等等。不过,咱们先掌握这些基础知识,以后慢慢深入。代码虽然简单,但理解了这些核心思想,后面的路就好走多了。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)