Frontiers 期刊成果|Hello Robot 移动操作机器人实现无损伤授粉
导语: 在农业4.0的浪潮下,具身智能(Embodied AI)正从实验室走向田间地头。近日,来自哈利法大学(Khalifa University)等机构的研究团队在《Frontiers in Plant Science》发表了一项关于温室番茄自主授粉的重磅成果。这项研究不仅展示了前沿的6D姿态估计技术,更揭示了Hello Robot具身智能平台是如何成为连接算法与物理世界的桥梁。
一、挑战:如何给番茄花“做手术”而不伤花?
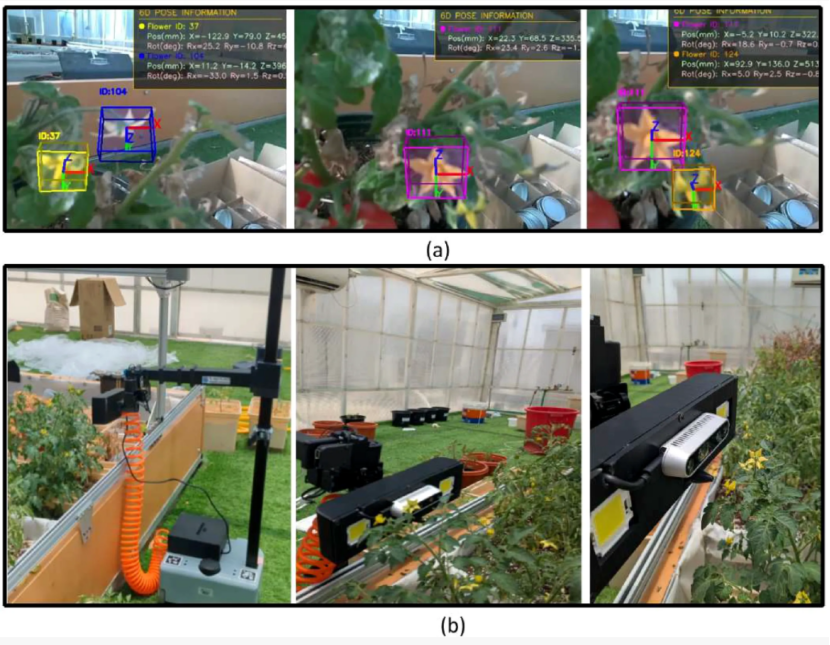
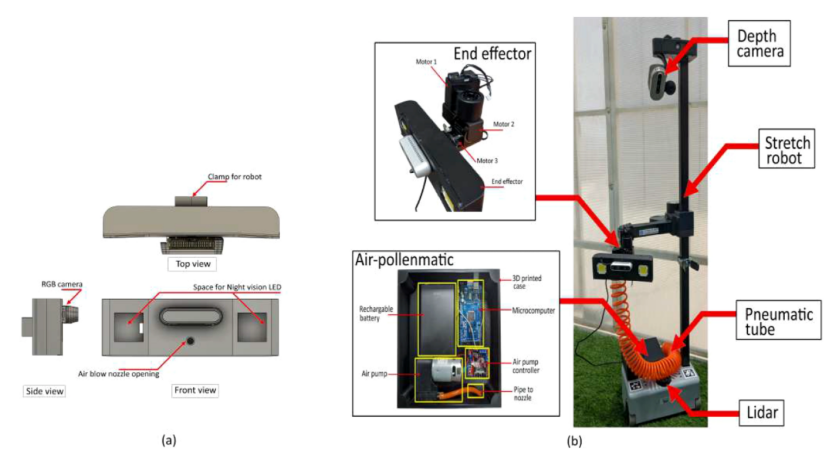
番茄是全球重要的蔬菜作物,但在温室环境中,自然授粉往往不足。传统的接触式机器人授粉容易损伤娇嫩的花朵,甚至传播病原体。为解决这一痛点,研究团队开发了“Air Pollenmatic”非接触式气流授粉系统。核心难点在于机器人必须在复杂的温室环境中精准识别花朵,并以正确的角度和距离进行“气流刺激”。
二、突破:YOLOv8-PnP 与 Hello Robot 的融合
研究团队提出了一种融合架构,将实时目标检测(YOLOv8)与6自由度(6D)姿态估计(PnP)相结合:
• 视觉大脑:系统能以28.5 FPS的速度运行,在2100张标注图像上实现了97.7%的mAP@0.5精度。
• 执行肢体:Hello Robot Stretch3 凭借其轻量化的机械臂和高度集成的传感器套件,高度契合了这套复杂的视觉伺服系统。研究团队利用ROS将感知算法与机器人的运动控制无缝对接,实现了从“看到花”到“对准花”的闭环控制。
实验数据: 在实地测试中,该系统实现了92.5%的授粉尝试率和85.6%的成功率,整体效能比传统接触式方法提高了8.3%。
三、为什么科研人员关注 Hello Robot?
这篇论文侧面印证了Hello Robot移动操作机器人在科研领域的独特优势:

1. 开箱即用的具身智能平台:不同于传统工业机器人繁琐的部署,Hello Robot Stretch(包括stretch 3及新一代stretch 4)专为研究和开发设计。它预装了完善的软件栈,支持Python API,让科研人员能将精力集中在算法创新而非底层驱动调试上。
2. 独特的移动操作能力:Stretch拥有垂直升降的桅杆和伸缩臂,这种运动学结构使其非常适合在狭窄的温室垄间穿梭,并能覆盖从地面到高层作物的广阔空间。
3. 开源与社区的力量:背靠开源社区,Hello Robot提供了丰富的文档和案例。无论是用于农业采摘、工业巡检,还是作为家庭服务机器人进行辅助研究,开发者都能快速找到参考代码,加速原型验证。

四、展望未来:从温室到家庭
这项研究证明了非接触式授粉的可行性,也展示了Hello Robot平台在处理精细操作任务时的潜力。随着新一代机型的推出,具身智能将在科研、工业柔性产线以及家庭服务机器人(如协助老人拿取物品)等更多领域落地。Hello Robot正在用一种更灵活的方式,让机器人技术真正服务于真实世界。
引用论文
https://www.frontiersin.org/journals/plant-science/articles/10.3389/fpls.2026.1771732/full
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!详情可邮件咨询sales@cnbestec.com

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 6
6 0
0- 0



 已为社区贡献36条内容
已为社区贡献36条内容

所有评论(0)