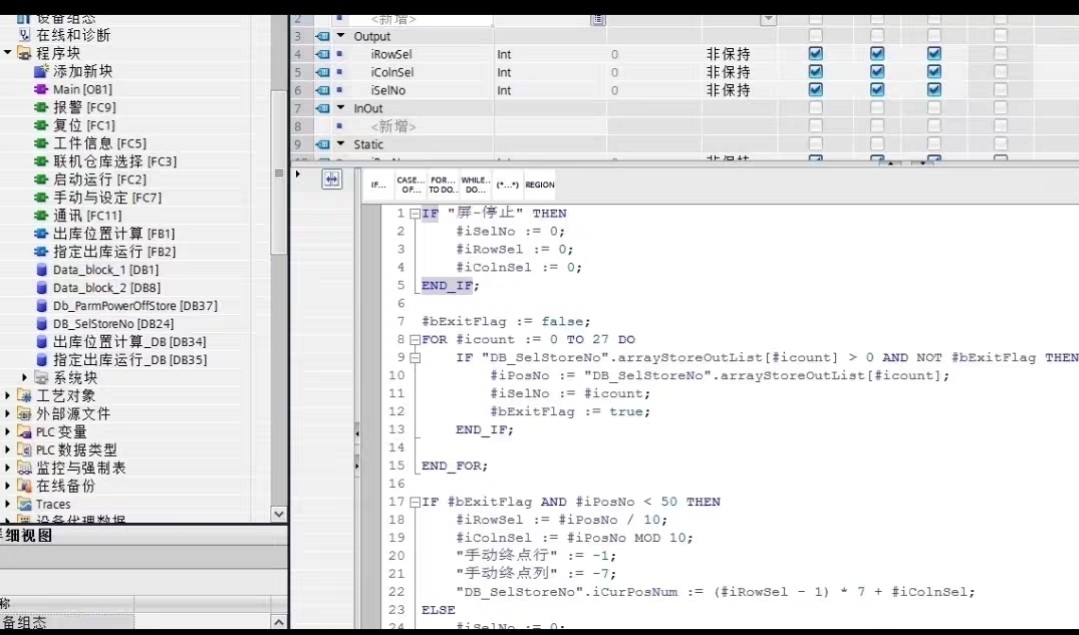
西门子PLC,1200机器人码垛/伺服/视觉 AGV程序 包括2台西门子PLC1215程序和2...
西门子PLC,1200机器人码垛/伺服/视觉 AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC与工业相机视觉定位及机器人使用Modbus TCP通讯 PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台120变频使用Profinet通讯帮助初学者学习1200,程序是v16版本 12
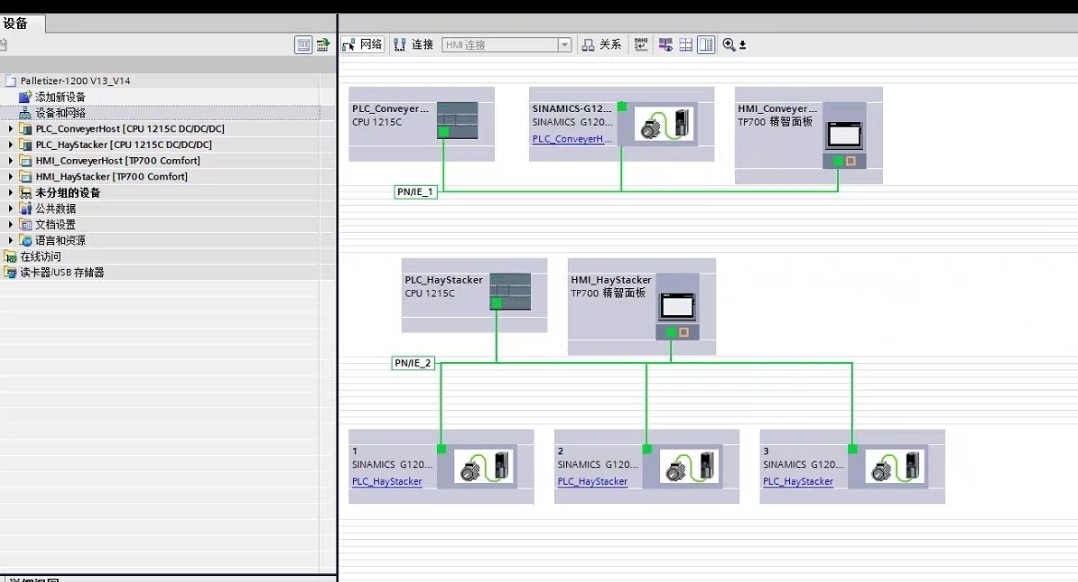
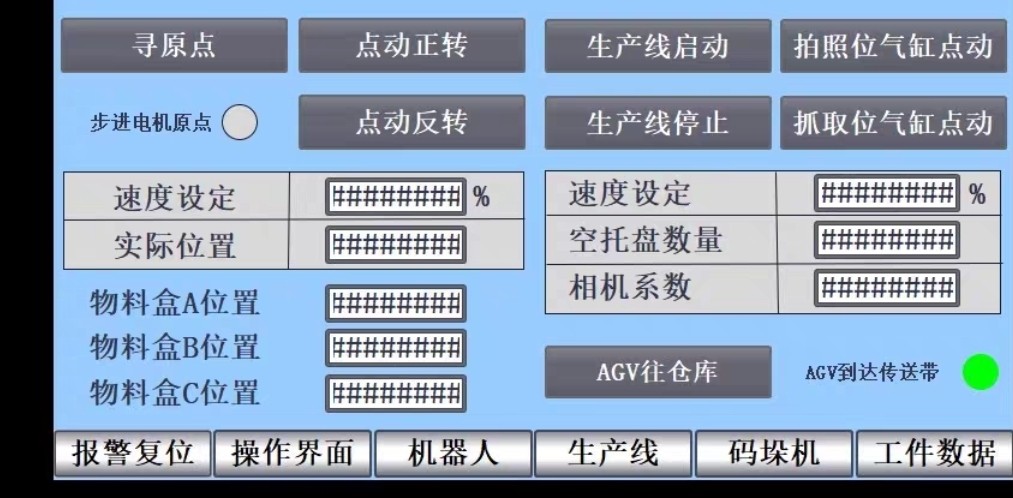
在工厂自动化现场溜达一圈,码垛工位绝对是视觉系选手——机械臂的精准抓取、传送带的节奏控制、AGV小车的走位配合,全得靠PLC在后头当总指挥。今天咱们拆解的这个项目里,两台西门子1200 PLC(1215系列)带着两TP700触摸屏,把Modbus TCP和Profinet玩得飞起,直接上干货。

视觉定位这活儿怎么整?
工业相机拍完照,PLC得在0.5秒内把坐标算明白。来看这段触发拍照的SCL代码:
//视觉触发程序段
IF "Photo_Trigger" THEN
"Camera".Write_Trigger := TRUE;
"Robot_Ready" := FALSE;
WAIT UNTIL "Camera".Data_Ready;
Calc_Position("Camera".X_Coord, "Camera".Y_Coord);
"Robot_Ready" := TRUE;
END_IF;这里用了硬核的WAIT语句卡住程序流,等视觉数据到位才放行。注意PLC和相机之间走的是Profinet IO-Device模式,实时性比走普通以太网强得多。
机械臂Modbus TCP通讯要点

两台PLC之间用1215自带的PN口做Modbus主从通讯,下面这段主站读数据程序放OB1里循环跑:
//Modbus主站读取机械臂状态
IF NOT "MB_Client".Busy THEN
"MB_Client".MB_MODE := 3; //功能码03读保持寄存器
"MB_Client".ADDR := 40001; //机械臂状态寄存器首地址
"MB_Client".LEN := 6; //连续读6个寄存器
"MB_Client".REQ := TRUE;
"Robot_Status" := WORD_TO_INT("MB_Client".DATA_IN[0]);
"Pallet_Count" := WORD_TO_INT("MB_Client".DATA_IN[1]);
END_IF;重点注意Modbus地址映射——40001对应DATAIN[0],40002对应DATAIN[1],依此类推。调试时经常有人栽在这个地址偏移上。
西门子PLC,1200机器人码垛/伺服/视觉 AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC与工业相机视觉定位及机器人使用Modbus TCP通讯 PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台120变频使用Profinet通讯帮助初学者学习1200,程序是v16版本 12

变频器Profinet组网骚操作
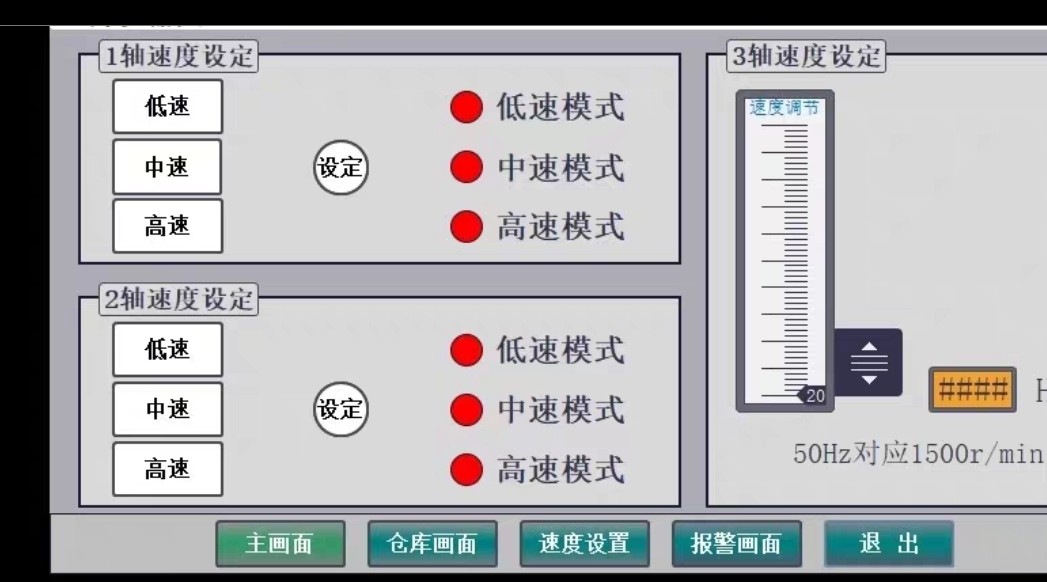
四台G120变频器挂Profinet,在TIA V16里直接拖GSDML文件搞定。组态时有个坑:每台变频器的设备名称必须和实际硬件完全一致!见过新手因为设备名带空格导致通讯失败的惨案。速度给定程序段长这样:
//变频器速度控制
"VFD1".Setpoint := INT_TO_REAL("HMI_Speed") * 0.01;
IF "Start_VFD" THEN
"VFD1".ControlWord.16#047E := 16#047F; //启动命令
END_IF;这里用了个小技巧:速度百分比转实数时乘以0.01,比用DIV指令更省运算周期。控制字操作直接上十六进制,老司机都这么干。
触摸屏的防呆设计
两台TP700做HMI,重点在报警界面设计。变量连接时记得加滤波时间,不然屏幕会闪瞎眼。比如急停按钮的状态监控:
//HMI按钮状态处理
"Emergency_Stop" := "HMI_ES_Button" AND NOT("ES_Reset");这里用了个自锁逻辑,必须等复位按钮按下才能解除急停状态,防止误操作。
这个项目的程序架构用了模块化设计——视觉处理、机器人通讯、变频控制各自独立成FB块。建议初学者先用博图V16的"程序复制"功能克隆功能块,比手动重建效率高十倍。调试时多用趋势图功能抓数据流,比在线监控更直观。
最后丢个彩蛋:AGV调度程序里用了个骚气的数组算法,把8台小车的路径优先级排得明明白白。下回有机会咱们专门扒这个路径规划的核心代码,保证比教科书上的案例带劲十倍。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 19
19 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)