深度学习平台使用文档
深度学习训练工具
深度学习训练工具(Deep Learning Tool, DLT)用于训练检测刀闸、仪表、压板等目标的深度学习模型。
运行环境
1.硬件环境
- 内存:>16GB
- 显存:>9GB
2.软件环境
- 系统:Ubuntu 16.04-x86_64
- CUDA
- cuDNN
- caffe
- python2.7
- pyqt4
- sip
- java
- apache tomcat8
软件安装
一. 安装Ubuntu 16.04及显卡驱动
Ubuntu16.04系统安装方法可以在网络上搜索相关教程,此处就不再详述。
安装NVIDIA显卡驱动大致流程如下:进入命令行终端 --> 禁用lightdm桌面服务 --> 安装驱动 (禁用nouveau驱动,安装NVIDIA驱动)–> 启用lightdm桌面服务 --> 重启进入BIOS关闭secure boot --> 重启电脑。
最重要的步骤为:重启进入BIOS关闭secure boot,此步若不操作,驱动将不会起效!
-
ubuntu系统安装完毕后,启动时会进入X桌面,可以用U盘将所有提前下载好的驱动、CUDA安装文件、CUDNN安装文件等等文件拷贝到电脑中。
-
键盘上按下
ctrl + alt + F1,进入命令行模式。ubuntu有命令行模式和X桌面模式,安装驱动必须在命令行模式进行。 -
禁用X桌面服务,命令行输入:
sudo service lightdm stop,此命令将关闭桌面服务,现在已经不能进入桌面模式(重启电脑会重启桌面服务)。 -
禁用nouveau驱动。ubuntu默认使用自带的nouveau驱动,在安装NVIDIA驱动前,要先禁止nouveau驱动。将nouveau添加到黑名单blacklist.conf中,linux启动时,就不会加载nouveau。
禁用nouveau需要在tty文本模式下进行操作。
由于blacklist.conf文件的属性不允许修改。所以需要先修改文件属性。
查看属性:ll /etc/modprobe.d/blacklist.conf
修改属性:sudo chmod 666 /etc/modprobe.d/blacklist.conf
用vi编辑器打开:sudo vi /etc/modprobe.d/blacklist.conf
在文件末尾添加如下2行:blacklist nouveauoptions nouveau modeset=0
修改并保存文件后,把文件属性复原:sudo chmod 644 /etc/modprobe.d/blacklist.conf
更新一下内核:sudo update-initramfs -u
修改后需要重启系统。
重启系统确认nouveau是否已经被屏蔽掉,使用lsmod命令查看:lsmod | grep nouveau
若命令行中没有nouveau驱动出现,说明nouveau驱动禁用成功。 -
确认NVIDIA-CUDA版本对应关系:

-
添加ppa库,通过ppa安装显卡驱动,注意不要从NVIDIA官网下载显卡驱动,直接通过ppa安装即可:
sudo add-apt-repository ppa:graphics-drivers/ppasudo apt-get updatesudo apt-get install nvidia-driver-415
由于本机显卡为GTX 1080Ti,截止到2018年12月17日,该显卡最新稳定版驱动版本为415.23,因此安装nvidia-415驱动。
安装驱动过程中,若提示各种操作,一般都按accept同意。如果某一步提示你是否Disable Secure Boot,选择ok,进行禁用secure boot。这时会要求你设置密码,直接输入12345678,再输一次确认。安装成功后,再次输入sudo apt-get install nvidia-415,会提示已经安装驱动。
但此时输入nvidia-smi会提示无此命令,驱动没有安装好。这个提示是正常的,因为我们实际上还没正式在BIOS禁用secure boot,现在先可以忽略这个警告。
二. 安装CUDA
CUDA是实现训练过程计算的工具,可以到CUDA下载相应版本的runfile文件(.run文件),将文件放在HOME目录下。
我使用的是9.1版本的cuda,在tty文本模式下直接安装:
sudo sh cuda_9.1.85_387.26_linux.run
安装过程中会提示你进行一些确认操作,首先是接受服务条款,输入accept确认,然后会提示是否安装cuda tookit、cuda-example等,均输入Y进行确定。但请注意,当询问是否安装附带的驱动时,一定要选N!我们在第一部分已经安装好最新的驱动,附带的驱动是旧版本的而且会有问题,所以不要选择安装驱动。
稍等片刻等待安装完成,这个时候可以直接接着测试CUDA是否安装成功,也可以重启后测试CUDA是否安装成功。重启后打开命令行,输入ls /dev/nvidia*,若出现4~5个以nvidia开头的文件夹说明安装成功。
此时已经安装好显卡驱动和CUDA 9.1。输入nvidia-smi可查看显卡驱动和其他信息。
最后是配置环境变量,此步很重要,不配置环境变量系统将无法知道CUDA是否被安装:
输入:sudo vi /etc/profile,在底部插入以下两句话:
export PATH=/usr/local/cuda-9.1/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-9.1/lib64:$LD_LIBRARY_PATH
然后按esc键,输入:wq,然后回车退出。
最后输入:source /etc/profile,使设置生效。
三. 安装CUDNN
CUDNN是NVIDIA用于加速深度学习的模块,装完CUDA之后就要装这个,预先在其它电脑下载完毕,然后复制到本机HOME目录下,解压
tar -xzf cudnn-9.1-linux-x64-v7.1.tgz
cd cuda
sudo cp lib64/* /usr/local/cuda/lib64/
sudo cp include/* /usr/local/cuda/include/
CUDNN就这样安装完毕,现在重启lightdm服务,可重启桌面模式:
sudo service lightdm start
若之前未重启电脑,现在可以重启电脑了,进入下一步,禁用Secure Boot!
四. 禁用Secure Boot
ubuntu16.04有个重要的特性,就是如果需要安装第三方显卡驱动(NVIDIA的就是第三方显卡驱动),就必须在BIOS中禁用“安全启动”模式(secure boot),否则第三方显卡驱动将无法被启动!
当第三部分结束后,输入sudo reboot重启电脑,电脑重启的那一刻,按下F2或者DEL键进入华硕的BIOS,这里只以华硕X99-E WS主板为例,其它主板请参考各自进入BIOS的方式。
- 进入BIOS,点击BOOT(启动)菜单栏,往下选择“Secure Boot”:

- 进入Secure Boot界面后,光标移动至“OS type”,选择为“Other OS”:

然后点击“Key Management”,进入界面。 - 选择“Clear Secure Root Keys”,删除安全启动密钥,删除后就能禁止secure boot。

按下yes或comfirm,确认删除:
- 按下F10,确认保存设置并重启电脑:

成功禁用secure boot之后,重启就能回到X桌面,按Ctrl + Alt + T,调出命令行,输入nvidia-smi就能看见驱动信息。
你还可以输入nvcc -V来查看CUDA版本。
五. 安装opencv-3.4.1
本机使用的是opencv3.4.1,安装前先到OpenCV官网下载source源码opencv-3.4.1.zip,将其保存在$HOME目录下,解压opencv-3.4.1
unzip opencv-3.4.1.zip
进入opencv-3.4.1文件夹
cd opencv-3.4.1
安装依赖项
sudo apt-get install cmake
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev
sudo apt-get install libjpeg.dev libtiff4.dev libswscale-dev libjasper-dev
要确保每一个依赖项都安装成功。创建编译文件夹并进入编译文件夹
mkdir release
cd release
cmake一下
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local …
注意:如果已经在新的文件夹中编译,但是还会出现之前的报错,把cmakecache.txt删了再编译就可
期间可能会下载一个东西,等待一会儿就OK 。
cmake结束,开始编译
make -j64
编译结束,开始安装
sudo make install
安装结束后,OpenCV编译过程就结束了,接下来就需要配置一些OpenCV的编译环境首先将OpenCV的库添加到路径,从而可以让系统找到
sudo gedit /etc/ld.so.conf.d/opencv.conf
执行此命令后打开的可能是一个空白的文件,只需要在文件末尾添加
/usr/local/lib
保存后关闭文件。接着执行如下命令使得刚才的配置路径生效
sudo ldconfig
接着配置bash环境变量
sudo gedit /etc/bash.bashrc
在文件末尾添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
保存,执行如下命令使得配置生效
source /etc/bash.bashrc
更新
sudo updatedb
到此OpenCV所有的配置都已经完成 ,下面用一个小程序来测试一下,使用OpenCV的sample程序,目的在于打开机器的摄像头设备。
首先进入$opencv_HOME/samples/cpp/example_cmake
cd opencv-3.4.1/samples/cpp/example_cmake
然后按顺序执行
cmake .
make
./opencv_example
即可看到打开了摄像头,在左上角有一个“hello opencv”,即表示测试成功。
六. 安装caffe
- 安装依赖项
sudo apt-get install libprotobuf-dev libleveldb-dev libsnappy-dev
sudo apt-get install libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
sudo apt-get install libatlas-base-dev
sudo apt-get install libopenblas-dev
sudo apt-get install libgflags-dev libgoogle-glog-dev liblmdb-dev
sudo apt-get install python-skimage python-protobuf
确保每个依赖项都安装成功再进行下一步,若出错,请自行百度解决。
- 安装caffe
安装过程大致为:在$HOME目录下打开命令行,下载caffe–>创建并修改Makefile.config文件–>修改Makefile文件–>编译caffe–>配置环境变量
下载caffe
git clone https://github.com/weiliu89/caffe.git
创建Makefile.config文件
cd caffe
cp Makefile.config.example Makefile.config
我使用Ubuntu系统自带的python,使用GPU加速。有相同需求的话可以打开Makefile.config文件,使用我的文件替换其中的内容。
Makefile.config文件:
## Refer to http://caffe.berkeleyvision.org/installation.html
# Contributions simplifying and improving our build system are welcome!
# cuDNN acceleration switch (uncomment to build with cuDNN).
# USE_CUDNN := 1
# CPU-only switch (uncomment to build without GPU support).
# CPU_ONLY := 1
# uncomment to disable IO dependencies and corresponding data layers
# USE_OPENCV := 0
# USE_LEVELDB := 0
# USE_LMDB := 0
# uncomment to allow MDB_NOLOCK when reading LMDB files (only if necessary)
# You should not set this flag if you will be reading LMDBs with any
# possibility of simultaneous read and write
# ALLOW_LMDB_NOLOCK := 1
# Uncomment if you're using OpenCV 3
OPENCV_VERSION := 3
# To customize your choice of compiler, uncomment and set the following.
# N.B. the default for Linux is g++ and the default for OSX is clang++
# CUSTOM_CXX := g++
# CUDA directory contains bin/ and lib/ directories that we need.
CUDA_DIR := /usr/local/cuda
# On Ubuntu 14.04, if cuda tools are installed via
# "sudo apt-get install nvidia-cuda-toolkit" then use this instead:
# CUDA_DIR := /usr
# CUDA architecture setting: going with all of them.
# For CUDA < 6.0, comment the *_50 through *_61 lines for compatibility.
# For CUDA < 8.0, comment the *_60 and *_61 lines for compatibility.
CUDA_ARCH := -gencode arch=compute_30,code=sm_30 \
-gencode arch=compute_35,code=sm_35 \
-gencode arch=compute_50,code=sm_50 \
-gencode arch=compute_52,code=sm_52 \
-gencode arch=compute_60,code=sm_60 \
-gencode arch=compute_61,code=sm_61 \
-gencode arch=compute_61,code=compute_61
# BLAS choice:
# atlas for ATLAS (default)
# mkl for MKL
# open for OpenBlas
BLAS := atlas
# Custom (MKL/ATLAS/OpenBLAS) include and lib directories.
# Leave commented to accept the defaults for your choice of BLAS
# (which should work)!
# BLAS_INCLUDE := /path/to/your/blas
# BLAS_LIB := /path/to/your/blas
# Homebrew puts openblas in a directory that is not on the standard search path
# BLAS_INCLUDE := $(shell brew --prefix openblas)/include
# BLAS_LIB := $(shell brew --prefix openblas)/lib
# This is required only if you will compile the matlab interface.
# MATLAB directory should contain the mex binary in /bin.
# MATLAB_DIR := /usr/local
# MATLAB_DIR := /Applications/MATLAB_R2012b.app
# NOTE: this is required only if you will compile the python interface.
# We need to be able to find Python.h and numpy/arrayobject.h.
PYTHON_INCLUDE := /usr/include/python2.7 \
/usr/local/lib/python2.7/dist-packages/numpy/core/include
# Anaconda Python distribution is quite popular. Include path:
# Verify anaconda location, sometimes it's in root.
# ANACONDA_HOME := $(HOME)/anaconda
# PYTHON_INCLUDE := $(ANACONDA_HOME)/include \
# $(ANACONDA_HOME)/include/python2.7 \
# $(ANACONDA_HOME)/lib/python2.7/site-packages/numpy/core/include
# Uncomment to use Python 3 (default is Python 2)
# PYTHON_LIBRARIES := boost_python3 python3.5m
# PYTHON_INCLUDE := /usr/include/python3.5m \
# /usr/lib/python3.5/dist-packages/numpy/core/include
# We need to be able to find libpythonX.X.so or .dylib.
PYTHON_LIB := /usr/lib
# PYTHON_LIB := $(ANACONDA_HOME)/lib
# Homebrew installs numpy in a non standard path (keg only)
# PYTHON_INCLUDE += $(dir $(shell python -c 'import numpy.core; print(numpy.core.__file__)'))/include
# PYTHON_LIB += $(shell brew --prefix numpy)/lib
# Uncomment to support layers written in Python (will link against Python libs)
WITH_PYTHON_LAYER := 1
# Whatever else you find you need goes here.
#INCLUDE_DIRS := $(PYTHON_INCLUDE) /usr/local/include
#LIBRARY_DIRS := $(PYTHON_LIB) /usr/local/lib /usr/lib
INCLUDE_DIRS := $(PYTHON_INCLUDE) /usr/local/include /usr/include/hdf5/serial
LIBRARY_DIRS := $(PYTHON_LIB) /usr/local/lib /usr/lib /usr/lib/x86_64-linux-gnu /usr/lib/x86_64-gnu/hdf5/serial
# If Homebrew is installed at a non standard location (for example your home directory) and you use it for general dependencies
# INCLUDE_DIRS += $(shell brew --prefix)/include
# LIBRARY_DIRS += $(shell brew --prefix)/lib
# NCCL acceleration switch (uncomment to build with NCCL)
# https://github.com/NVIDIA/nccl (last tested version: v1.2.3-1+cuda8.0)
# USE_NCCL := 1
# Uncomment to use `pkg-config` to specify OpenCV library paths.
# (Usually not necessary -- OpenCV libraries are normally installed in one of the above $LIBRARY_DIRS.)
# USE_PKG_CONFIG := 1
# N.B. both build and distribute dirs are cleared on `make clean`
BUILD_DIR := build
DISTRIBUTE_DIR := distribute
# Uncomment for debugging. Does not work on OSX due to https://github.com/BVLC/caffe/issues/171
# DEBUG := 1
# The ID of the GPU that 'make runtest' will use to run unit tests.
TEST_GPUID := 0
# enable pretty build (comment to see full commands)
Q ?= @
同样的,打开Makefile文件,使用我的Makefile文件内容进行替换。
Makefile文件:
PROJECT := caffe
CONFIG_FILE := Makefile.config
# Explicitly check for the config file, otherwise make -k will proceed anyway.
ifeq ($(wildcard $(CONFIG_FILE)),)
$(error $(CONFIG_FILE) not found. See $(CONFIG_FILE).example.)
endif
include $(CONFIG_FILE)
BUILD_DIR_LINK := $(BUILD_DIR)
ifeq ($(RELEASE_BUILD_DIR),)
RELEASE_BUILD_DIR := .$(BUILD_DIR)_release
endif
ifeq ($(DEBUG_BUILD_DIR),)
DEBUG_BUILD_DIR := .$(BUILD_DIR)_debug
endif
DEBUG ?= 0
ifeq ($(DEBUG), 1)
BUILD_DIR := $(DEBUG_BUILD_DIR)
OTHER_BUILD_DIR := $(RELEASE_BUILD_DIR)
else
BUILD_DIR := $(RELEASE_BUILD_DIR)
OTHER_BUILD_DIR := $(DEBUG_BUILD_DIR)
endif
# All of the directories containing code.
SRC_DIRS := $(shell find * -type d -exec bash -c "find {} -maxdepth 1 \
\( -name '*.cpp' -o -name '*.proto' \) | grep -q ." \; -print)
# The target shared library name
LIBRARY_NAME := $(PROJECT)
LIB_BUILD_DIR := $(BUILD_DIR)/lib
STATIC_NAME := $(LIB_BUILD_DIR)/lib$(LIBRARY_NAME).a
DYNAMIC_VERSION_MAJOR := 1
DYNAMIC_VERSION_MINOR := 0
DYNAMIC_VERSION_REVISION := 0
DYNAMIC_NAME_SHORT := lib$(LIBRARY_NAME).so
#DYNAMIC_SONAME_SHORT := $(DYNAMIC_NAME_SHORT).$(DYNAMIC_VERSION_MAJOR)
DYNAMIC_VERSIONED_NAME_SHORT := $(DYNAMIC_NAME_SHORT).$(DYNAMIC_VERSION_MAJOR).$(DYNAMIC_VERSION_MINOR).$(DYNAMIC_VERSION_REVISION)
DYNAMIC_NAME := $(LIB_BUILD_DIR)/$(DYNAMIC_VERSIONED_NAME_SHORT)
COMMON_FLAGS += -DCAFFE_VERSION=$(DYNAMIC_VERSION_MAJOR).$(DYNAMIC_VERSION_MINOR).$(DYNAMIC_VERSION_REVISION)
##############################
# Get all source files
##############################
# CXX_SRCS are the source files excluding the test ones.
CXX_SRCS := $(shell find src/$(PROJECT) ! -name "test_*.cpp" -name "*.cpp")
# CU_SRCS are the cuda source files
CU_SRCS := $(shell find src/$(PROJECT) ! -name "test_*.cu" -name "*.cu")
# TEST_SRCS are the test source files
TEST_MAIN_SRC := src/$(PROJECT)/test/test_caffe_main.cpp
TEST_SRCS := $(shell find src/$(PROJECT) -name "test_*.cpp")
TEST_SRCS := $(filter-out $(TEST_MAIN_SRC), $(TEST_SRCS))
TEST_CU_SRCS := $(shell find src/$(PROJECT) -name "test_*.cu")
GTEST_SRC := src/gtest/gtest-all.cpp
# TOOL_SRCS are the source files for the tool binaries
TOOL_SRCS := $(shell find tools -name "*.cpp")
# EXAMPLE_SRCS are the source files for the example binaries
EXAMPLE_SRCS := $(shell find examples -name "*.cpp")
# BUILD_INCLUDE_DIR contains any generated header files we want to include.
BUILD_INCLUDE_DIR := $(BUILD_DIR)/src
# PROTO_SRCS are the protocol buffer definitions
PROTO_SRC_DIR := src/$(PROJECT)/proto
PROTO_SRCS := $(wildcard $(PROTO_SRC_DIR)//*.proto) # rplace this line: PROTO_SRCS := $(wildcard $(PROTO_SRC_DIR)/*.proto)
# PROTO_BUILD_DIR will contain the .cc and obj files generated from
# PROTO_SRCS; PROTO_BUILD_INCLUDE_DIR will contain the .h header files
PROTO_BUILD_DIR := $(BUILD_DIR)/$(PROTO_SRC_DIR)
PROTO_BUILD_INCLUDE_DIR := $(BUILD_INCLUDE_DIR)/$(PROJECT)/proto
# NONGEN_CXX_SRCS includes all source/header files except those generated
# automatically (e.g., by proto).
NONGEN_CXX_SRCS := $(shell find \
src/$(PROJECT) \
include/$(PROJECT) \
python/$(PROJECT) \
matlab/+$(PROJECT)/private \
examples \
tools \
-name "*.cpp" -or -name "*.hpp" -or -name "*.cu" -or -name "*.cuh")
LINT_SCRIPT := scripts/cpp_lint.py
LINT_OUTPUT_DIR := $(BUILD_DIR)/.lint
LINT_EXT := lint.txt
LINT_OUTPUTS := $(addsuffix .$(LINT_EXT), $(addprefix $(LINT_OUTPUT_DIR)/, $(NONGEN_CXX_SRCS)))
EMPTY_LINT_REPORT := $(BUILD_DIR)/.$(LINT_EXT)
NONEMPTY_LINT_REPORT := $(BUILD_DIR)/$(LINT_EXT)
# PY$(PROJECT)_SRC is the python wrapper for $(PROJECT)
PY$(PROJECT)_SRC := python/$(PROJECT)/_$(PROJECT).cpp
PY$(PROJECT)_SO := python/$(PROJECT)/_$(PROJECT).so
PY$(PROJECT)_HXX := include/$(PROJECT)/layers/python_layer.hpp
# MAT$(PROJECT)_SRC is the mex entrance point of matlab package for $(PROJECT)
MAT$(PROJECT)_SRC := matlab/+$(PROJECT)/private/$(PROJECT)_.cpp
ifneq ($(MATLAB_DIR),)
MAT_SO_EXT := $(shell $(MATLAB_DIR)/bin/mexext)
endif
MAT$(PROJECT)_SO := matlab/+$(PROJECT)/private/$(PROJECT)_.$(MAT_SO_EXT)
##############################
# Derive generated files
##############################
# The generated files for protocol buffers
PROTO_GEN_HEADER_SRCS := $(addprefix $(PROTO_BUILD_DIR)/, \
$(notdir ${PROTO_SRCS:.proto=.pb.h}))
PROTO_GEN_HEADER := $(addprefix $(PROTO_BUILD_INCLUDE_DIR)/, \
$(notdir ${PROTO_SRCS:.proto=.pb.h}))
PROTO_GEN_CC := $(addprefix $(BUILD_DIR)/, ${PROTO_SRCS:.proto=.pb.cc})
PY_PROTO_BUILD_DIR := python/$(PROJECT)/proto
PY_PROTO_INIT := python/$(PROJECT)/proto/__init__.py
PROTO_GEN_PY := $(foreach file,${PROTO_SRCS:.proto=_pb2.py}, \
$(PY_PROTO_BUILD_DIR)/$(notdir $(file)))
# The objects corresponding to the source files
# These objects will be linked into the final shared library, so we
# exclude the tool, example, and test objects.
CXX_OBJS := $(addprefix $(BUILD_DIR)/, ${CXX_SRCS:.cpp=.o})
CU_OBJS := $(addprefix $(BUILD_DIR)/cuda/, ${CU_SRCS:.cu=.o})
PROTO_OBJS := ${PROTO_GEN_CC:.cc=.o}
OBJS := $(PROTO_OBJS) $(CXX_OBJS) $(CU_OBJS)
# tool, example, and test objects
TOOL_OBJS := $(addprefix $(BUILD_DIR)/, ${TOOL_SRCS:.cpp=.o})
TOOL_BUILD_DIR := $(BUILD_DIR)/tools
TEST_CXX_BUILD_DIR := $(BUILD_DIR)/src/$(PROJECT)/test
TEST_CU_BUILD_DIR := $(BUILD_DIR)/cuda/src/$(PROJECT)/test
TEST_CXX_OBJS := $(addprefix $(BUILD_DIR)/, ${TEST_SRCS:.cpp=.o})
TEST_CU_OBJS := $(addprefix $(BUILD_DIR)/cuda/, ${TEST_CU_SRCS:.cu=.o})
TEST_OBJS := $(TEST_CXX_OBJS) $(TEST_CU_OBJS)
GTEST_OBJ := $(addprefix $(BUILD_DIR)/, ${GTEST_SRC:.cpp=.o})
EXAMPLE_OBJS := $(addprefix $(BUILD_DIR)/, ${EXAMPLE_SRCS:.cpp=.o})
# Output files for automatic dependency generation
DEPS := ${CXX_OBJS:.o=.d} ${CU_OBJS:.o=.d} ${TEST_CXX_OBJS:.o=.d} \
${TEST_CU_OBJS:.o=.d} $(BUILD_DIR)/${MAT$(PROJECT)_SO:.$(MAT_SO_EXT)=.d}
# tool, example, and test bins
TOOL_BINS := ${TOOL_OBJS:.o=.bin}
EXAMPLE_BINS := ${EXAMPLE_OBJS:.o=.bin}
# symlinks to tool bins without the ".bin" extension
TOOL_BIN_LINKS := ${TOOL_BINS:.bin=}
# Put the test binaries in build/test for convenience.
TEST_BIN_DIR := $(BUILD_DIR)/test
TEST_CU_BINS := $(addsuffix .testbin,$(addprefix $(TEST_BIN_DIR)/, \
$(foreach obj,$(TEST_CU_OBJS),$(basename $(notdir $(obj))))))
TEST_CXX_BINS := $(addsuffix .testbin,$(addprefix $(TEST_BIN_DIR)/, \
$(foreach obj,$(TEST_CXX_OBJS),$(basename $(notdir $(obj))))))
TEST_BINS := $(TEST_CXX_BINS) $(TEST_CU_BINS)
# TEST_ALL_BIN is the test binary that links caffe dynamically.
TEST_ALL_BIN := $(TEST_BIN_DIR)/test_all.testbin
##############################
# Derive compiler warning dump locations
##############################
WARNS_EXT := warnings.txt
CXX_WARNS := $(addprefix $(BUILD_DIR)/, ${CXX_SRCS:.cpp=.o.$(WARNS_EXT)})
CU_WARNS := $(addprefix $(BUILD_DIR)/cuda/, ${CU_SRCS:.cu=.o.$(WARNS_EXT)})
TOOL_WARNS := $(addprefix $(BUILD_DIR)/, ${TOOL_SRCS:.cpp=.o.$(WARNS_EXT)})
EXAMPLE_WARNS := $(addprefix $(BUILD_DIR)/, ${EXAMPLE_SRCS:.cpp=.o.$(WARNS_EXT)})
TEST_WARNS := $(addprefix $(BUILD_DIR)/, ${TEST_SRCS:.cpp=.o.$(WARNS_EXT)})
TEST_CU_WARNS := $(addprefix $(BUILD_DIR)/cuda/, ${TEST_CU_SRCS:.cu=.o.$(WARNS_EXT)})
ALL_CXX_WARNS := $(CXX_WARNS) $(TOOL_WARNS) $(EXAMPLE_WARNS) $(TEST_WARNS)
ALL_CU_WARNS := $(CU_WARNS) $(TEST_CU_WARNS)
ALL_WARNS := $(ALL_CXX_WARNS) $(ALL_CU_WARNS)
EMPTY_WARN_REPORT := $(BUILD_DIR)/.$(WARNS_EXT)
NONEMPTY_WARN_REPORT := $(BUILD_DIR)/$(WARNS_EXT)
##############################
# Derive include and lib directories
##############################
CUDA_INCLUDE_DIR := $(CUDA_DIR)/include
CUDA_LIB_DIR :=
# add <cuda>/lib64 only if it exists
ifneq ("$(wildcard $(CUDA_DIR)/lib64)","")
CUDA_LIB_DIR += $(CUDA_DIR)/lib64
endif
CUDA_LIB_DIR += $(CUDA_DIR)/lib
INCLUDE_DIRS += $(BUILD_INCLUDE_DIR) ./src ./include
ifneq ($(CPU_ONLY), 1)
INCLUDE_DIRS += $(CUDA_INCLUDE_DIR)
LIBRARY_DIRS += $(CUDA_LIB_DIR)
LIBRARIES := cudart cublas curand
endif
LIBRARIES += glog gflags protobuf boost_system boost_filesystem boost_regex m hdf5_hl hdf5_serial opencv_core opencv_highgui opencv_imgproc opencv_imgcodecs opencv_videoio
# handle IO dependencies
USE_LEVELDB ?= 1
USE_LMDB ?= 1
USE_OPENCV ?= 1
ifeq ($(USE_LEVELDB), 1)
LIBRARIES += leveldb snappy
endif
ifeq ($(USE_LMDB), 1)
LIBRARIES += lmdb
endif
ifeq ($(USE_OPENCV), 1)
LIBRARIES += opencv_core opencv_highgui opencv_imgproc
ifeq ($(OPENCV_VERSION), 3)
LIBRARIES += opencv_imgcodecs
endif
endif
PYTHON_LIBRARIES ?= boost_python python2.7
WARNINGS := -Wall -Wno-sign-compare
##############################
# Set build directories
##############################
DISTRIBUTE_DIR ?= distribute
DISTRIBUTE_SUBDIRS := $(DISTRIBUTE_DIR)/bin $(DISTRIBUTE_DIR)/lib
DIST_ALIASES := dist
ifneq ($(strip $(DISTRIBUTE_DIR)),distribute)
DIST_ALIASES += distribute
endif
ALL_BUILD_DIRS := $(sort $(BUILD_DIR) $(addprefix $(BUILD_DIR)/, $(SRC_DIRS)) \
$(addprefix $(BUILD_DIR)/cuda/, $(SRC_DIRS)) \
$(LIB_BUILD_DIR) $(TEST_BIN_DIR) $(PY_PROTO_BUILD_DIR) $(LINT_OUTPUT_DIR) \
$(DISTRIBUTE_SUBDIRS) $(PROTO_BUILD_INCLUDE_DIR))
##############################
# Set directory for Doxygen-generated documentation
##############################
DOXYGEN_CONFIG_FILE ?= ./.Doxyfile
# should be the same as OUTPUT_DIRECTORY in the .Doxyfile
DOXYGEN_OUTPUT_DIR ?= ./doxygen
DOXYGEN_COMMAND ?= doxygen
# All the files that might have Doxygen documentation.
DOXYGEN_SOURCES := $(shell find \
src/$(PROJECT) \
include/$(PROJECT) \
python/ \
matlab/ \
examples \
tools \
-name "*.cpp" -or -name "*.hpp" -or -name "*.cu" -or -name "*.cuh" -or \
-name "*.py" -or -name "*.m")
DOXYGEN_SOURCES += $(DOXYGEN_CONFIG_FILE)
##############################
# Configure build
##############################
# Determine platform
UNAME := $(shell uname -s)
ifeq ($(UNAME), Linux)
LINUX := 1
else ifeq ($(UNAME), Darwin)
OSX := 1
OSX_MAJOR_VERSION := $(shell sw_vers -productVersion | cut -f 1 -d .)
OSX_MINOR_VERSION := $(shell sw_vers -productVersion | cut -f 2 -d .)
endif
# Linux
ifeq ($(LINUX), 1)
CXX ?= /usr/bin/g++
GCCVERSION := $(shell $(CXX) -dumpversion | cut -f1,2 -d.)
# older versions of gcc are too dumb to build boost with -Wuninitalized
ifeq ($(shell echo | awk '{exit $(GCCVERSION) < 4.6;}'), 1)
WARNINGS += -Wno-uninitialized
endif
# boost::thread is reasonably called boost_thread (compare OS X)
# We will also explicitly add stdc++ to the link target.
LIBRARIES += boost_thread stdc++
VERSIONFLAGS += -Wl,-soname,$(DYNAMIC_VERSIONED_NAME_SHORT) -Wl,-rpath,$(ORIGIN)/../lib
endif
# OS X:
# clang++ instead of g++
# libstdc++ for NVCC compatibility on OS X >= 10.9 with CUDA < 7.0
ifeq ($(OSX), 1)
CXX := /usr/bin/clang++
ifneq ($(CPU_ONLY), 1)
CUDA_VERSION := $(shell $(CUDA_DIR)/bin/nvcc -V | grep -o 'release [0-9.]*' | tr -d '[a-z ]')
ifeq ($(shell echo | awk '{exit $(CUDA_VERSION) < 7.0;}'), 1)
CXXFLAGS += -stdlib=libstdc++
LINKFLAGS += -stdlib=libstdc++
endif
# clang throws this warning for cuda headers
WARNINGS += -Wno-unneeded-internal-declaration
# 10.11 strips DYLD_* env vars so link CUDA (rpath is available on 10.5+)
OSX_10_OR_LATER := $(shell [ $(OSX_MAJOR_VERSION) -ge 10 ] && echo true)
OSX_10_5_OR_LATER := $(shell [ $(OSX_MINOR_VERSION) -ge 5 ] && echo true)
ifeq ($(OSX_10_OR_LATER),true)
ifeq ($(OSX_10_5_OR_LATER),true)
LDFLAGS += -Wl,-rpath,$(CUDA_LIB_DIR)
endif
endif
endif
# gtest needs to use its own tuple to not conflict with clang
COMMON_FLAGS += -DGTEST_USE_OWN_TR1_TUPLE=1
# boost::thread is called boost_thread-mt to mark multithreading on OS X
LIBRARIES += boost_thread-mt
# we need to explicitly ask for the rpath to be obeyed
ORIGIN := @loader_path
VERSIONFLAGS += -Wl,-install_name,@rpath/$(DYNAMIC_VERSIONED_NAME_SHORT) -Wl,-rpath,$(ORIGIN)/../../build/lib
else
ORIGIN := \$$ORIGIN
endif
# Custom compiler
ifdef CUSTOM_CXX
CXX := $(CUSTOM_CXX)
endif
# Static linking
ifneq (,$(findstring clang++,$(CXX)))
STATIC_LINK_COMMAND := -Wl,-force_load $(STATIC_NAME)
else ifneq (,$(findstring g++,$(CXX)))
STATIC_LINK_COMMAND := -Wl,--whole-archive $(STATIC_NAME) -Wl,--no-whole-archive
else
# The following line must not be indented with a tab, since we are not inside a target
$(error Cannot static link with the $(CXX) compiler)
endif
# Debugging
ifeq ($(DEBUG), 1)
COMMON_FLAGS += -DDEBUG -g -O0
NVCCFLAGS += -G
else
COMMON_FLAGS += -DNDEBUG -O2
endif
# cuDNN acceleration configuration.
ifeq ($(USE_CUDNN), 1)
LIBRARIES += cudnn
COMMON_FLAGS += -DUSE_CUDNN
endif
# NCCL acceleration configuration
ifeq ($(USE_NCCL), 1)
LIBRARIES += nccl
COMMON_FLAGS += -DUSE_NCCL
endif
# configure IO libraries
ifeq ($(USE_OPENCV), 1)
COMMON_FLAGS += -DUSE_OPENCV
endif
ifeq ($(USE_LEVELDB), 1)
COMMON_FLAGS += -DUSE_LEVELDB
endif
ifeq ($(USE_LMDB), 1)
COMMON_FLAGS += -DUSE_LMDB
ifeq ($(ALLOW_LMDB_NOLOCK), 1)
COMMON_FLAGS += -DALLOW_LMDB_NOLOCK
endif
endif
# CPU-only configuration
ifeq ($(CPU_ONLY), 1)
OBJS := $(PROTO_OBJS) $(CXX_OBJS)
TEST_OBJS := $(TEST_CXX_OBJS)
TEST_BINS := $(TEST_CXX_BINS)
ALL_WARNS := $(ALL_CXX_WARNS)
TEST_FILTER := --gtest_filter="-*GPU*"
COMMON_FLAGS += -DCPU_ONLY
endif
# Python layer support
ifeq ($(WITH_PYTHON_LAYER), 1)
COMMON_FLAGS += -DWITH_PYTHON_LAYER
LIBRARIES += $(PYTHON_LIBRARIES)
endif
# BLAS configuration (default = ATLAS)
BLAS ?= atlas
ifeq ($(BLAS), mkl)
# MKL
LIBRARIES += mkl_rt
COMMON_FLAGS += -DUSE_MKL
MKLROOT ?= /opt/intel/mkl
BLAS_INCLUDE ?= $(MKLROOT)/include
BLAS_LIB ?= $(MKLROOT)/lib $(MKLROOT)/lib/intel64
else ifeq ($(BLAS), open)
# OpenBLAS
LIBRARIES += openblas
else
# ATLAS
ifeq ($(LINUX), 1)
ifeq ($(BLAS), atlas)
# Linux simply has cblas and atlas
LIBRARIES += cblas atlas
endif
else ifeq ($(OSX), 1)
# OS X packages atlas as the vecLib framework
LIBRARIES += cblas
# 10.10 has accelerate while 10.9 has veclib
XCODE_CLT_VER := $(shell pkgutil --pkg-info=com.apple.pkg.CLTools_Executables | grep 'version' | sed 's/[^0-9]*\([0-9]\).*/\1/')
XCODE_CLT_GEQ_7 := $(shell [ $(XCODE_CLT_VER) -gt 6 ] && echo 1)
XCODE_CLT_GEQ_6 := $(shell [ $(XCODE_CLT_VER) -gt 5 ] && echo 1)
ifeq ($(XCODE_CLT_GEQ_7), 1)
BLAS_INCLUDE ?= /Applications/Xcode.app/Contents/Developer/Platforms/MacOSX.platform/Developer/SDKs/$(shell ls /Applications/Xcode.app/Contents/Developer/Platforms/MacOSX.platform/Developer/SDKs/ | sort | tail -1)/System/Library/Frameworks/Accelerate.framework/Versions/A/Frameworks/vecLib.framework/Versions/A/Headers
else ifeq ($(XCODE_CLT_GEQ_6), 1)
BLAS_INCLUDE ?= /System/Library/Frameworks/Accelerate.framework/Versions/Current/Frameworks/vecLib.framework/Headers/
LDFLAGS += -framework Accelerate
else
BLAS_INCLUDE ?= /System/Library/Frameworks/vecLib.framework/Versions/Current/Headers/
LDFLAGS += -framework vecLib
endif
endif
endif
INCLUDE_DIRS += $(BLAS_INCLUDE)
LIBRARY_DIRS += $(BLAS_LIB)
LIBRARY_DIRS += $(LIB_BUILD_DIR)
# Automatic dependency generation (nvcc is handled separately)
CXXFLAGS += -MMD -MP
# Complete build flags.
COMMON_FLAGS += $(foreach includedir,$(INCLUDE_DIRS),-I$(includedir))
CXXFLAGS += -pthread -fPIC $(COMMON_FLAGS) $(WARNINGS)
NVCCFLAGS += -ccbin=$(CXX) -Xcompiler -fPIC $(COMMON_FLAGS)
# mex may invoke an older gcc that is too liberal with -Wuninitalized
MATLAB_CXXFLAGS := $(CXXFLAGS) -Wno-uninitialized
LINKFLAGS += -pthread -fPIC $(COMMON_FLAGS) $(WARNINGS)
USE_PKG_CONFIG ?= 0
ifeq ($(USE_PKG_CONFIG), 1)
PKG_CONFIG := $(shell pkg-config opencv --libs)
else
PKG_CONFIG :=
endif
LDFLAGS += $(foreach librarydir,$(LIBRARY_DIRS),-L$(librarydir)) $(PKG_CONFIG) \
$(foreach library,$(LIBRARIES),-l$(library))
PYTHON_LDFLAGS := $(LDFLAGS) $(foreach library,$(PYTHON_LIBRARIES),-l$(library))
# 'superclean' target recursively* deletes all files ending with an extension
# in $(SUPERCLEAN_EXTS) below. This may be useful if you've built older
# versions of Caffe that do not place all generated files in a location known
# to the 'clean' target.
#
# 'supercleanlist' will list the files to be deleted by make superclean.
#
# * Recursive with the exception that symbolic links are never followed, per the
# default behavior of 'find'.
SUPERCLEAN_EXTS := .so .a .o .bin .testbin .pb.cc .pb.h _pb2.py .cuo
# Set the sub-targets of the 'everything' target.
EVERYTHING_TARGETS := all py$(PROJECT) test warn lint
# Only build matcaffe as part of "everything" if MATLAB_DIR is specified.
ifneq ($(MATLAB_DIR),)
EVERYTHING_TARGETS += mat$(PROJECT)
endif
##############################
# Define build targets
##############################
.PHONY: all lib test clean docs linecount lint lintclean tools examples $(DIST_ALIASES) \
py mat py$(PROJECT) mat$(PROJECT) proto runtest \
superclean supercleanlist supercleanfiles warn everything
all: lib tools examples
lib: $(STATIC_NAME) $(DYNAMIC_NAME)
everything: $(EVERYTHING_TARGETS)
linecount:
cloc --read-lang-def=$(PROJECT).cloc \
src/$(PROJECT) include/$(PROJECT) tools examples \
python matlab
lint: $(EMPTY_LINT_REPORT)
lintclean:
@ $(RM) -r $(LINT_OUTPUT_DIR) $(EMPTY_LINT_REPORT) $(NONEMPTY_LINT_REPORT)
docs: $(DOXYGEN_OUTPUT_DIR)
@ cd ./docs ; ln -sfn ../$(DOXYGEN_OUTPUT_DIR)/html doxygen
$(DOXYGEN_OUTPUT_DIR): $(DOXYGEN_CONFIG_FILE) $(DOXYGEN_SOURCES)
$(DOXYGEN_COMMAND) $(DOXYGEN_CONFIG_FILE)
$(EMPTY_LINT_REPORT): $(LINT_OUTPUTS) | $(BUILD_DIR)
@ cat $(LINT_OUTPUTS) > $@
@ if [ -s "$@" ]; then \
cat $@; \
mv $@ $(NONEMPTY_LINT_REPORT); \
echo "Found one or more lint errors."; \
exit 1; \
fi; \
$(RM) $(NONEMPTY_LINT_REPORT); \
echo "No lint errors!";
$(LINT_OUTPUTS): $(LINT_OUTPUT_DIR)/%.lint.txt : % $(LINT_SCRIPT) | $(LINT_OUTPUT_DIR)
@ mkdir -p $(dir $@)
@ python $(LINT_SCRIPT) $< 2>&1 \
| grep -v "^Done processing " \
| grep -v "^Total errors found: 0" \
> $@ \
|| true
test: $(TEST_ALL_BIN) $(TEST_ALL_DYNLINK_BIN) $(TEST_BINS)
tools: $(TOOL_BINS) $(TOOL_BIN_LINKS)
examples: $(EXAMPLE_BINS)
py$(PROJECT): py
py: $(PY$(PROJECT)_SO) $(PROTO_GEN_PY)
$(PY$(PROJECT)_SO): $(PY$(PROJECT)_SRC) $(PY$(PROJECT)_HXX) | $(DYNAMIC_NAME)
@ echo CXX/LD -o $@ $<
$(Q)$(CXX) -shared -o $@ $(PY$(PROJECT)_SRC) \
-o $@ $(LINKFLAGS) -l$(LIBRARY_NAME) $(PYTHON_LDFLAGS) \
-Wl,-rpath,$(ORIGIN)/../../build/lib
mat$(PROJECT): mat
mat: $(MAT$(PROJECT)_SO)
$(MAT$(PROJECT)_SO): $(MAT$(PROJECT)_SRC) $(STATIC_NAME)
@ if [ -z "$(MATLAB_DIR)" ]; then \
echo "MATLAB_DIR must be specified in $(CONFIG_FILE)" \
"to build mat$(PROJECT)."; \
exit 1; \
fi
@ echo MEX $<
$(Q)$(MATLAB_DIR)/bin/mex $(MAT$(PROJECT)_SRC) \
CXX="$(CXX)" \
CXXFLAGS="\$$CXXFLAGS $(MATLAB_CXXFLAGS)" \
CXXLIBS="\$$CXXLIBS $(STATIC_LINK_COMMAND) $(LDFLAGS)" -output $@
@ if [ -f "$(PROJECT)_.d" ]; then \
mv -f $(PROJECT)_.d $(BUILD_DIR)/${MAT$(PROJECT)_SO:.$(MAT_SO_EXT)=.d}; \
fi
runtest: $(TEST_ALL_BIN)
$(TOOL_BUILD_DIR)/caffe
$(TEST_ALL_BIN) $(TEST_GPUID) --gtest_shuffle $(TEST_FILTER)
pytest: py
cd python; python -m unittest discover -s caffe/test
mattest: mat
cd matlab; $(MATLAB_DIR)/bin/matlab -nodisplay -r 'caffe.run_tests(), exit()'
warn: $(EMPTY_WARN_REPORT)
$(EMPTY_WARN_REPORT): $(ALL_WARNS) | $(BUILD_DIR)
@ cat $(ALL_WARNS) > $@
@ if [ -s "$@" ]; then \
cat $@; \
mv $@ $(NONEMPTY_WARN_REPORT); \
echo "Compiler produced one or more warnings."; \
exit 1; \
fi; \
$(RM) $(NONEMPTY_WARN_REPORT); \
echo "No compiler warnings!";
$(ALL_WARNS): %.o.$(WARNS_EXT) : %.o
$(BUILD_DIR_LINK): $(BUILD_DIR)/.linked
# Create a target ".linked" in this BUILD_DIR to tell Make that the "build" link
# is currently correct, then delete the one in the OTHER_BUILD_DIR in case it
# exists and $(DEBUG) is toggled later.
$(BUILD_DIR)/.linked:
@ mkdir -p $(BUILD_DIR)
@ $(RM) $(OTHER_BUILD_DIR)/.linked
@ $(RM) -r $(BUILD_DIR_LINK)
@ ln -s $(BUILD_DIR) $(BUILD_DIR_LINK)
@ touch $@
$(ALL_BUILD_DIRS): | $(BUILD_DIR_LINK)
@ mkdir -p $@
$(DYNAMIC_NAME): $(OBJS) | $(LIB_BUILD_DIR)
@ echo LD -o $@
$(Q)$(CXX) -shared -o $@ $(OBJS) $(VERSIONFLAGS) $(LINKFLAGS) $(LDFLAGS)
@ cd $(BUILD_DIR)/lib; rm -f $(DYNAMIC_NAME_SHORT); ln -s $(DYNAMIC_VERSIONED_NAME_SHORT) $(DYNAMIC_NAME_SHORT)
$(STATIC_NAME): $(OBJS) | $(LIB_BUILD_DIR)
@ echo AR -o $@
$(Q)ar rcs $@ $(OBJS)
$(BUILD_DIR)/%.o: %.cpp | $(ALL_BUILD_DIRS)
@ echo CXX $<
$(Q)$(CXX) $< $(CXXFLAGS) -c -o $@ 2> $@.$(WARNS_EXT) \
|| (cat $@.$(WARNS_EXT); exit 1)
@ cat $@.$(WARNS_EXT)
$(PROTO_BUILD_DIR)/%.pb.o: $(PROTO_BUILD_DIR)/%.pb.cc $(PROTO_GEN_HEADER) \
| $(PROTO_BUILD_DIR)
@ echo CXX $<
$(Q)$(CXX) $< $(CXXFLAGS) -c -o $@ 2> $@.$(WARNS_EXT) \
|| (cat $@.$(WARNS_EXT); exit 1)
@ cat $@.$(WARNS_EXT)
$(BUILD_DIR)/cuda/%.o: %.cu | $(ALL_BUILD_DIRS)
@ echo NVCC $<
$(Q)$(CUDA_DIR)/bin/nvcc $(NVCCFLAGS) $(CUDA_ARCH) -M $< -o ${@:.o=.d} \
-odir $(@D)
$(Q)$(CUDA_DIR)/bin/nvcc $(NVCCFLAGS) $(CUDA_ARCH) -c $< -o $@ 2> $@.$(WARNS_EXT) \
|| (cat $@.$(WARNS_EXT); exit 1)
@ cat $@.$(WARNS_EXT)
$(TEST_ALL_BIN): $(TEST_MAIN_SRC) $(TEST_OBJS) $(GTEST_OBJ) \
| $(DYNAMIC_NAME) $(TEST_BIN_DIR)
@ echo CXX/LD -o $@ $<
$(Q)$(CXX) $(TEST_MAIN_SRC) $(TEST_OBJS) $(GTEST_OBJ) \
-o $@ $(LINKFLAGS) $(LDFLAGS) -l$(LIBRARY_NAME) -Wl,-rpath,$(ORIGIN)/../lib
$(TEST_CU_BINS): $(TEST_BIN_DIR)/%.testbin: $(TEST_CU_BUILD_DIR)/%.o \
$(GTEST_OBJ) | $(DYNAMIC_NAME) $(TEST_BIN_DIR)
@ echo LD $<
$(Q)$(CXX) $(TEST_MAIN_SRC) $< $(GTEST_OBJ) \
-o $@ $(LINKFLAGS) $(LDFLAGS) -l$(LIBRARY_NAME) -Wl,-rpath,$(ORIGIN)/../lib
$(TEST_CXX_BINS): $(TEST_BIN_DIR)/%.testbin: $(TEST_CXX_BUILD_DIR)/%.o \
$(GTEST_OBJ) | $(DYNAMIC_NAME) $(TEST_BIN_DIR)
@ echo LD $<
$(Q)$(CXX) $(TEST_MAIN_SRC) $< $(GTEST_OBJ) \
-o $@ $(LINKFLAGS) $(LDFLAGS) -l$(LIBRARY_NAME) -Wl,-rpath,$(ORIGIN)/../lib
# Target for extension-less symlinks to tool binaries with extension '*.bin'.
$(TOOL_BUILD_DIR)/%: $(TOOL_BUILD_DIR)/%.bin | $(TOOL_BUILD_DIR)
@ $(RM) $@
@ ln -s $(notdir $<) $@
$(TOOL_BINS): %.bin : %.o | $(DYNAMIC_NAME)
@ echo CXX/LD -o $@
$(Q)$(CXX) $< -o $@ $(LINKFLAGS) -l$(LIBRARY_NAME) $(LDFLAGS) \
-Wl,-rpath,$(ORIGIN)/../lib
$(EXAMPLE_BINS): %.bin : %.o | $(DYNAMIC_NAME)
@ echo CXX/LD -o $@
$(Q)$(CXX) $< -o $@ $(LINKFLAGS) -l$(LIBRARY_NAME) $(LDFLAGS) \
-Wl,-rpath,$(ORIGIN)/../../lib
proto: $(PROTO_GEN_CC) $(PROTO_GEN_HEADER)
$(PROTO_BUILD_DIR)/%.pb.cc $(PROTO_BUILD_DIR)/%.pb.h : \
$(PROTO_SRC_DIR)/%.proto | $(PROTO_BUILD_DIR)
@ echo PROTOC $<
$(Q)protoc --proto_path=$(PROTO_SRC_DIR) --cpp_out=$(PROTO_BUILD_DIR) $<
$(PY_PROTO_BUILD_DIR)/%_pb2.py : $(PROTO_SRC_DIR)/%.proto \
$(PY_PROTO_INIT) | $(PY_PROTO_BUILD_DIR)
@ echo PROTOC \(python\) $<
$(Q)protoc --proto_path=$(PROTO_SRC_DIR) --python_out=$(PY_PROTO_BUILD_DIR) $<
$(PY_PROTO_INIT): | $(PY_PROTO_BUILD_DIR)
touch $(PY_PROTO_INIT)
clean:
@- $(RM) -rf $(ALL_BUILD_DIRS)
@- $(RM) -rf $(OTHER_BUILD_DIR)
@- $(RM) -rf $(BUILD_DIR_LINK)
@- $(RM) -rf $(DISTRIBUTE_DIR)
@- $(RM) $(PY$(PROJECT)_SO)
@- $(RM) $(MAT$(PROJECT)_SO)
supercleanfiles:
$(eval SUPERCLEAN_FILES := $(strip \
$(foreach ext,$(SUPERCLEAN_EXTS), $(shell find . -name '*$(ext)' \
-not -path './data/*'))))
supercleanlist: supercleanfiles
@ \
if [ -z "$(SUPERCLEAN_FILES)" ]; then \
echo "No generated files found."; \
else \
echo $(SUPERCLEAN_FILES) | tr ' ' '\n'; \
fi
superclean: clean supercleanfiles
@ \
if [ -z "$(SUPERCLEAN_FILES)" ]; then \
echo "No generated files found."; \
else \
echo "Deleting the following generated files:"; \
echo $(SUPERCLEAN_FILES) | tr ' ' '\n'; \
$(RM) $(SUPERCLEAN_FILES); \
fi
$(DIST_ALIASES): $(DISTRIBUTE_DIR)
$(DISTRIBUTE_DIR): all py | $(DISTRIBUTE_SUBDIRS)
# add proto
cp -r src/caffe/proto $(DISTRIBUTE_DIR)/
# add include
cp -r include $(DISTRIBUTE_DIR)/
mkdir -p $(DISTRIBUTE_DIR)/include/caffe/proto
cp $(PROTO_GEN_HEADER_SRCS) $(DISTRIBUTE_DIR)/include/caffe/proto
# add tool and example binaries
cp $(TOOL_BINS) $(DISTRIBUTE_DIR)/bin
cp $(EXAMPLE_BINS) $(DISTRIBUTE_DIR)/bin
# add libraries
cp $(STATIC_NAME) $(DISTRIBUTE_DIR)/lib
install -m 644 $(DYNAMIC_NAME) $(DISTRIBUTE_DIR)/lib
cd $(DISTRIBUTE_DIR)/lib; rm -f $(DYNAMIC_NAME_SHORT); ln -s $(DYNAMIC_VERSIONED_NAME_SHORT) $(DYNAMIC_NAME_SHORT)
# add python - it's not the standard way, indeed...
cp -r python $(DISTRIBUTE_DIR)/python
-include $(DEPS)
编译caffe
编译caffe的过程为:make clean -->make all -j64 --> make test -j64 --> make runtest -j64 --> make pycaffe -j64
在命令行依次输入:
make clean
make all -j64
make test -j64
make runtest -j64
make pycaffe -j64
如果一切顺利,过程中没有报错,那么就可以进行下一步了,但是往往会有一些问题出现,我将遇到的问题记录在本文的caffe配置错误,便于参考。
配置环境变量
编辑~/.bashrc文件:
sudo gedit ~/.bashrc
加入如下环境变量:
export PYTHONPATH=/home/user/caffe/python:$PYTHONPATH
其中/home/user/caffe/python就是你caffe根目录下的python
然后更新环境变量
source ~/.bashrc
重新打开一个命令行,测试caffe是否配置成功
python
import caffe
如果没有出现错误,命令行提示继续输入指令,就说明配置成功,可以使用caffe了。
七. 配置Mobilenet-SSD
配置Mobilenet-SSD:下载源码和修改文件目录。
- 从官网下载SSD源码,保存在$HOME/caffe/examples目录下,已经下载好的文件可以复制到$HOME/caffe/examples目录下(使用我的caffe文件的话,Mobilenet-SSD已经放到了这个目录下)。
- 在$HOME/caffe/data文件夹下新建user_test文件夹
cd $HOME/caffe/data
mkdir user_test
- 复制VOC0712文件下三个文件create_data.sh、create_list.sh和labelmap_voc.prototxt到user_test文件夹
cp VOC0712/create* ./user_test
cp VOC0712/labelmap* ./user_test
- 进入user_test文件夹,依次修改文件名:
create_data.sh–>create_data_user_test.sh
create_list.sh–>create_list_user_test.sh
labelmap_voc.prototxt–>labelmap_user_test.prototxt - 打开create_list_user_test.sh文件,修改第13行为
for name in user_test. - 打开create_data_user_test.sh文件,将路径修改为user路径。
- 将$HOME/caffe/data/VOCdevkit2007文件夹下的VOC文件夹改名为user_test;
- 在$HOME/caffe/examples文件夹下新建user_test文件夹,将此文件夹链接到$HOME/caffe/data/VOCdevkit2007/user_test/lmdb文件夹下的user_test_test_lmdb和user_test_trainval_lmdb文件夹
ln -s $HOME/caffe/data/VOCdevkit2007/user_test/lmdb/user_test_test_lmdb $HOME/caffe/examples/user_test/user_test_test_lmdb
ln -s $HOME/caffe/data/VOCdevkit2007/user_test/lmdb/user_test_trainval_lmdb $HOME/caffe/examples/user_test/user_test_trainval_lmdb
- 进入$HOME/caffe/examples/MobileNet-SSD/template文件夹,打开MobileNetSSD_test_template.prototxt文件,修改24行为
source: "/home/user/caffe/examples/user_test/user_test_test_lmdb",修改31行为label_map_file: "/home/user/caffe/data/user_test/labelmap_user_test.prototxt"。 - 进入$HOME/caffe/examples/MobileNet-SSD/template文件夹,打开MobileNetSSD_train_template.prototxt文件,修改49行为
source: "/home/user/caffe/examples/user_test/user_test_trainval_lmdb/"。 - 进入$HOME/caffe/examples/MobileNet-SSD文件夹,打开gen_model.sh文件,修改16行为
trainfile=/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_train.prototxt,修改17行为testfile=/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_test.prototxt,修改18行为deploybnfile=/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_deploy_bn.prototxt,修改19行为deployfile=/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_deploy.prototxt,修改23行为cp /home/user/caffe/examples/MobileNet-SSD/template/MobileNetSSD_train_template.prototxt $trainfile,修改28行为cp /home/user/caffe/examples/MobileNet-SSD/template/MobileNetSSD_test_template.prototxt $testfile,修改38行为cp /home/user/caffe/examples/MobileNet-SSD/template/MobileNetSSD_deploy_template.prototxt $deployfile。 - 打开solver_test.prototxt,修改第1行为
train_net: "/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_train.prototxt",修改第2行为test_net: "/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_test.prototxt",修改第12行为snapshot_prefix: "/home/user/caffe/examples/MobileNet-SSD/snapshot/mobilenet"。 - 打开solver_train.prototxt,修改第1行为
train_net: "/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_train.prototxt",修改第2行为test_net: "/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_test.prototxt",修改第12行为snapshot_prefix: "/home/user/caffe/examples/MobileNet-SSD/snapshot/mobilenet"。 - 打开test.sh,修改第3行为
latest=$(ls -t /home/user/caffe/examples/MobileNet-SSD/snapshot/mobilenet_iter_120000.caffemodel | head -n 1),修改第7行为/home/user/caffe/build/tools/caffe train -solver="/home/user/caffe/examples/MobileNet-SSD/solver_test.prototxt" \。 - 打开train.sh,修改第2行为
if ! test -f /home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_train.prototxt ;then,修改第8行为/home/user/caffe/build/tools/caffe train -solver="/home/user/caffe/examples/MobileNet-SSD/solver_train.prototxt" \,修改第9行为-weights="/home/user/caffe/examples/MobileNet-SSD/mobilenet_iter_73000.caffemodel" \。 - 打开merge_bn.py,修改第3行为
caffe_root = '/home/user/caffe/',修改第7行为train_proto = '/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_train.prototxt',修改第8行为train_model = '/home/user/caffe/examples/MobileNet-SSD/snapshot/mobilenet_iter_120000.caffemodel',修改第10行为deploy_proto = '/home/user/caffe/examples/MobileNet-SSD/example/MobileNetSSD_deploy.prototxt',修改第11行为save_model = '/home/user/DL-Tool-v0.2-chinese/models/MobileNetSSD_deploy_T1_6.caffemodel'。
八. 配置DL-Tool运行环境
DL-Tool使用PyQt4开发,有些设备需要安装PyQt4相关的依赖项。但一般Ubuntu 16.04下有PyQt4,不需要另行安装,以下仅安装必须的依赖项。
- 安装依赖项
sudo apt-get install lxml
- 在home目录下进入DL-Tool-v0.2-chinese文件夹,新建models文件夹,生成软链接
cd DL-Tool-v0.2-chinese
mkdir models
ln -s /home/user/caffe/examples/MobileNet-SSD/example /home/user/DL-Tool-v0.2-chinese/example
ln -s /home/user/caffe/examples/MobileNet-SSD/snapshot /home/user/DL-Tool-v0.2-chinese/snapshot
- 打开DLTool.py,修改第121行为
cmd = "/home/user/caffe/examples/MobileNet-SSD/gen_model.sh %s" % text,修改第131行为cmd = "/home/user/caffe/examples/MobileNet-SSD/train.sh",修改140行为cmd = "/home/user/caffe/examples/MobileNet-SSD/test.sh",修改145行为cmd = "python /home/user/caffe/examples/MobileNet-SSD/merge_bn.py"。 - 打开LABELMAP.py,修改53行为
pth = "/home/user/caffe/data/user_test/",修改54行为f = open(pth+"labelmap_user_test.prototxt", 'w'),修改58行为cmd1 = "/home/user/caffe/data/user_test/create_list_user_test.sh",修改60行为cmd2 = "/home/user/caffe/data/user_test/create_data_user_test.sh"。 - 打开TEST_PARAM.py,修改52行为
ph="/home/user/caffe/examples/MobileNet-SSD/"。 - 打开TRAIN_PARAM.py,修改52行为
ph="/home/user/caffe/examples/MobileNet-SSD/"。 - 打开xml2txt.py,修改6行为
xmlfilepath = '/home/user/caffe/data/VOCdevkit2007/user_test/Annotations',修改7行为txtsavepath = '/home/user/caffe/data/VOCdevkit2007/user_test/ImageSets/Main',修改17行为ftrainval = open('/home/user/caffe/data/VOCdevkit2007/user_test/ImageSets/Main/trainval.txt', 'w'),修改18行为ftest = open('/home/user/caffe/data/VOCdevkit2007/user_test/ImageSets/Main/test.txt', 'w'),修改19行为ftrain = open('/home/user/caffe/data/VOCdevkit2007/user_test/ImageSets/Main/train.txt', 'w'),修改20行为fval = open('/home/user/caffe/data/VOCdevkit2007/user_test/ImageSets/Main/val.txt', 'w')。 - 打开XML2TXT.py,修改26行为
self.xmlfilepath.setText('/home/user/caffe/data/VOCdevkit2007/user_test/Annotations'),修改28行为self.txtsavepath.setText('/home/user/caffe/data/VOCdevkit2007/user_test/ImageSets/Main')。
使用说明
按照运行环境配置好软、硬件环境后,就可以开始使用深度学习训练工具,将DLTool文件夹放在$HOME路径下,打开命令行,进入DLTool文件夹:
cd DLTool
第一次运行深度学习工具时,需要赋予run.sh可执行权限:
chmod u+x run.sh
然后运行深度学习工具:
./run.sh
使用enter确认后,桌面上会出现深度学习工具界面: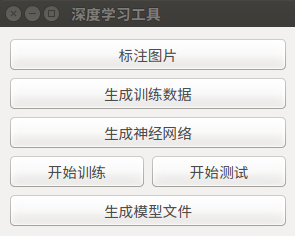
图中共有6个按钮:标注图片、生成训练数据、生成神经网络、开始训练、开始测试、生成模型文件。6个按钮对应深度学习工具的6个功能,这些按钮逻辑上是按照训练模型的先后顺序进行排列,也可以单独执行,若想要快速开始训练,请直接跳到按钮功能说明。
深度学习目标检测原理
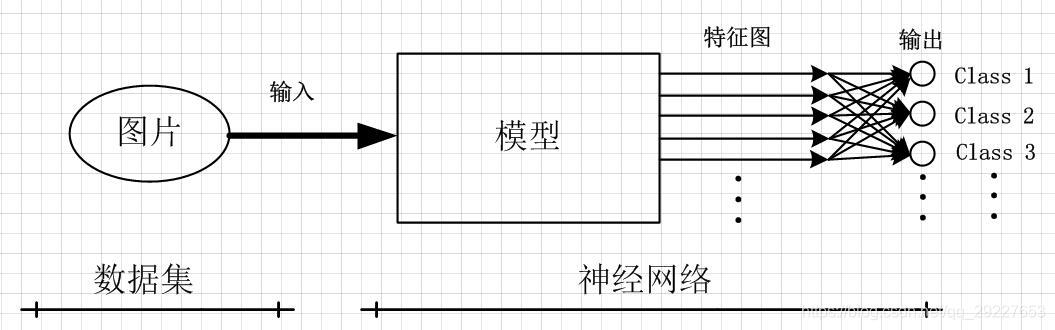
上图是图像特征抽取过程简图,图片经过模型得到特征图,然后根据目标的种类由特征图全连接到模型输出,判别目标种类。所以深度学习工具需要通过标注图片来制作数据集,需要设置目标种类名称以生成训练数据,另外还需要确定目标种类的数目来生成神经网络。
按钮功能说明
1.标注图片
训练使用PascalVOC格式数据集,保存在$HOME/caffe/data目录下,以VOCdevkit2007命名,其文件结构如下:
VOCdevkit2007--user_test--Annotations
--ImageSets--Main
--JPEGImages
Annotations文件夹中保存标注好的.xml文件,这些文件经过标注自动生成。ImageSets文件夹中保存了Main文件夹,Main文件夹中保存了4个.txt文件,分别是test.txt、train.txt、trainval.txt、val.txt,这4个文件由生成训练数据按钮生成。JPEGImages文件夹保存数据集的图片,这些图片最好使用数字命名,命名中不得出现中文、短线等,且必须以.jpg结尾。
点击标注图片按钮,将跳出labelImg图像标注工具,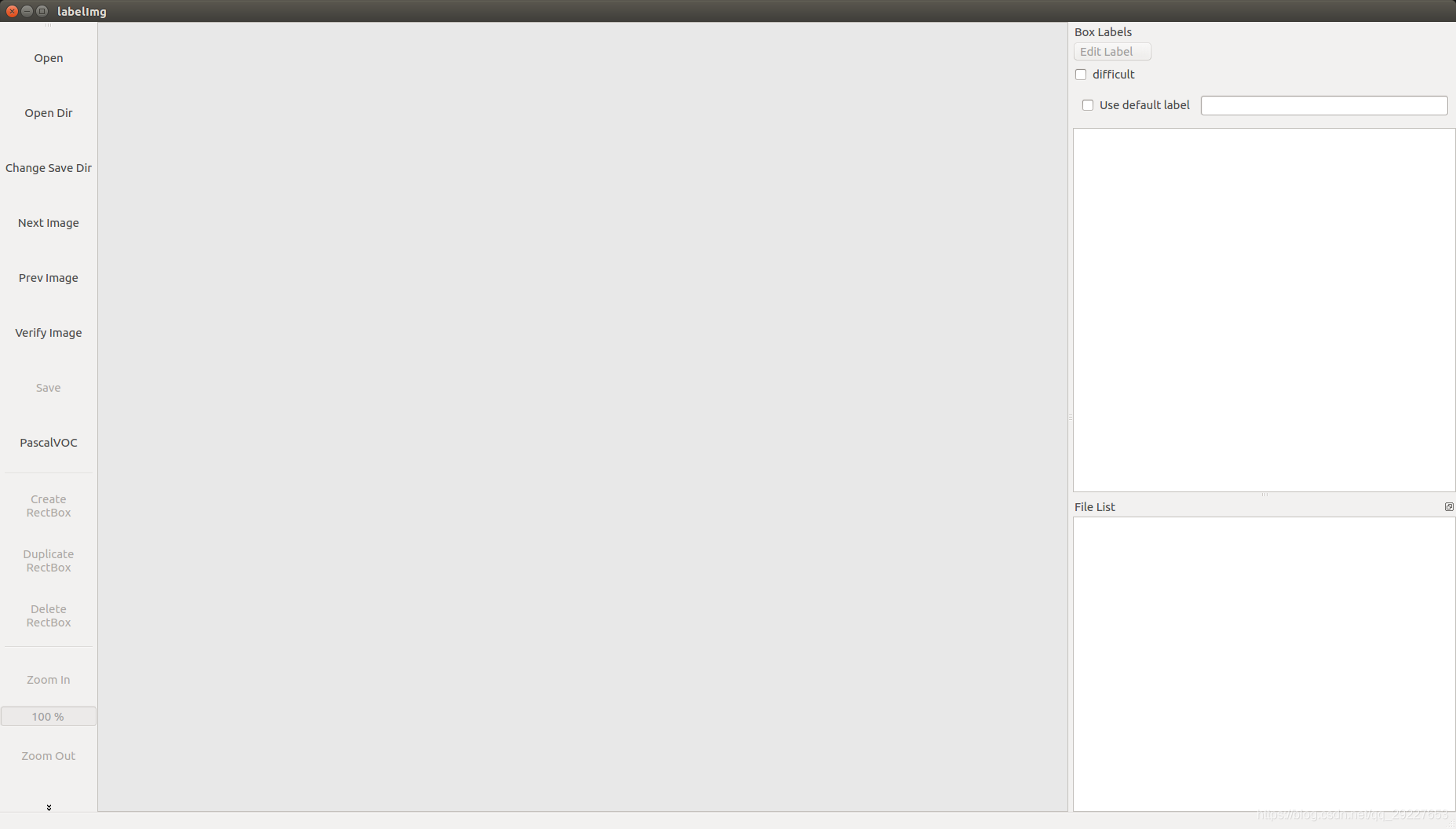
如上图,labelImg左侧栏是工具栏,点击Open Dir按钮,选择数据集图片所在的路径($HOME/caffe/data/VOCdevkit2007/user_test/JPEGImages)。下图是在我的电脑上进行选择的截图。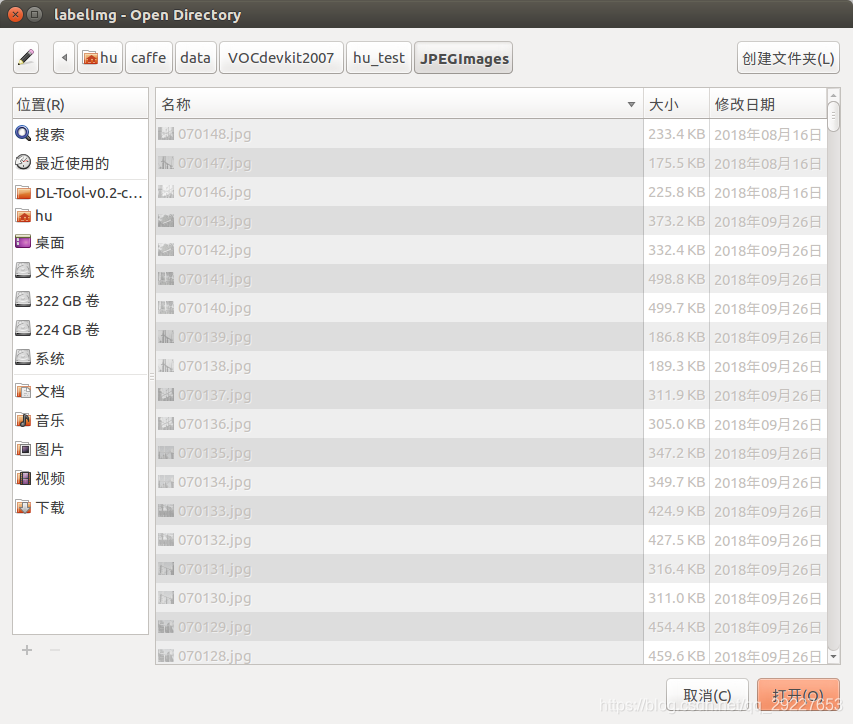
点击打开按钮,退回labelImg界面,然后点击Change Save Dir,选择.xml文件保存的路径($HOME/caffe/data/VOCdevkit2007/user_test/Annotations)。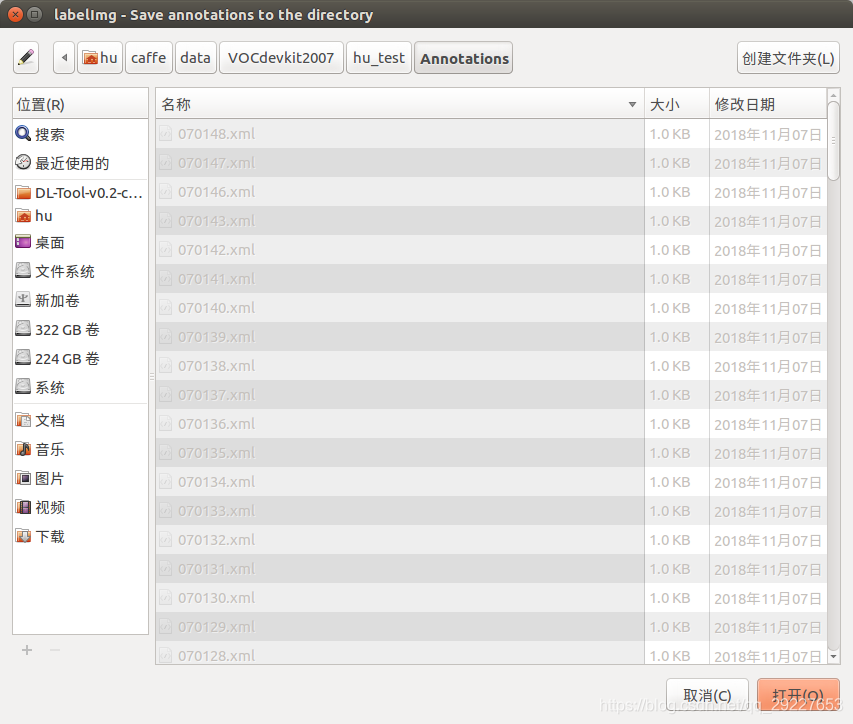
选好路径后点击打开按钮,然后进行标注。
标注界面如下图所示: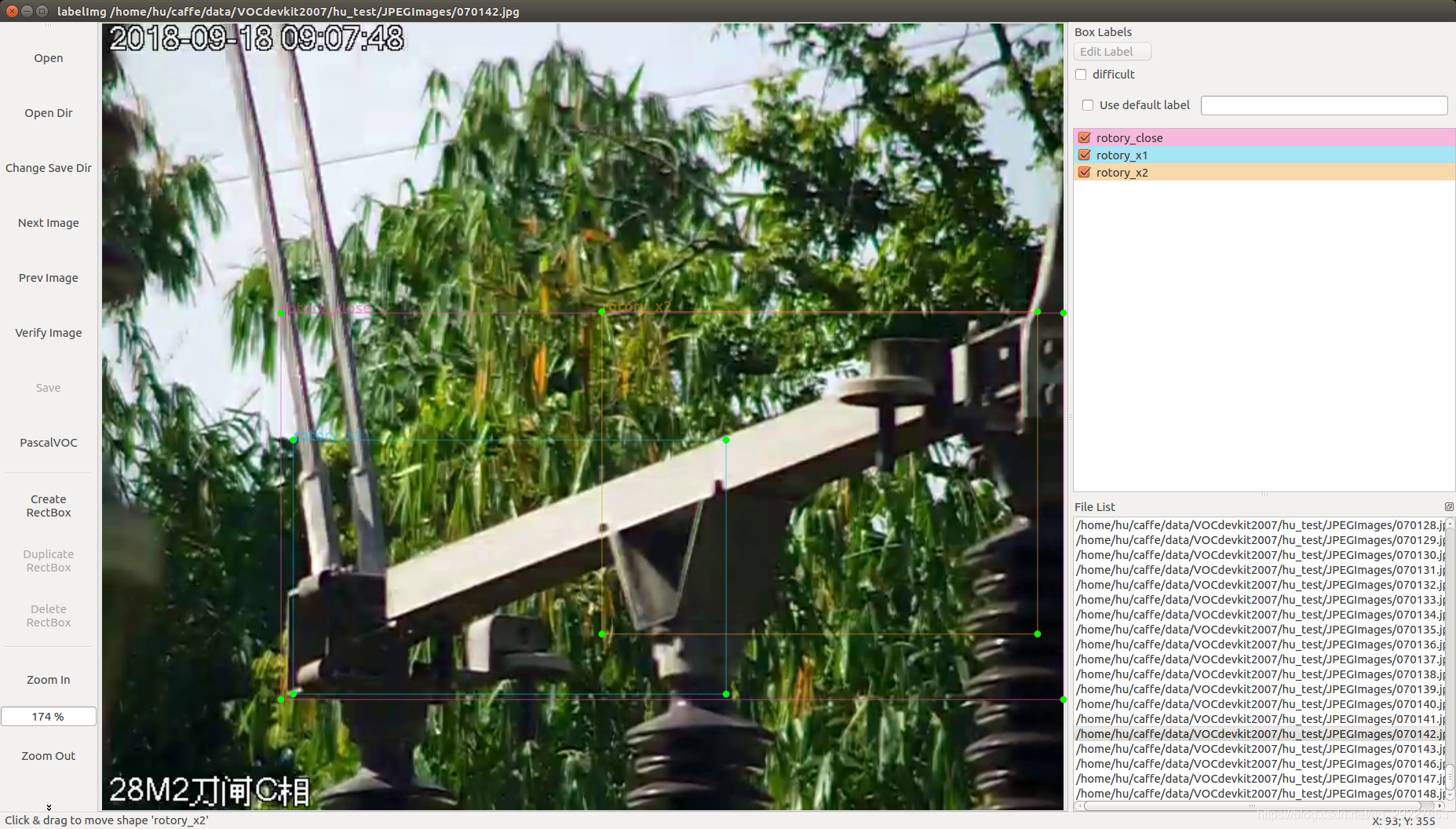
标注完成后,可以进行生成训练数据。
2.生成训练数据
caffe模型训练使用的是lmdb文件,训练开使前需要将图片文件转变成lmdb文件。生成训练数据功能会先将数据集分成测试集(test.txt)、训练验证集(teainval.txt)、验证集(val.txt)、训练集(train.txt)四个部分,然后依次生成lmdb文件列表和lmdb数据文件,最终在$HOME/caffe/data/VOCdevkit2007/user_test文件夹下创建lmdb文件夹,并在lmdb文件夹下生成测试和训练用的lmdb文件。
点击生成训练数据按钮,将出现一个叫做数据集标签的窗口。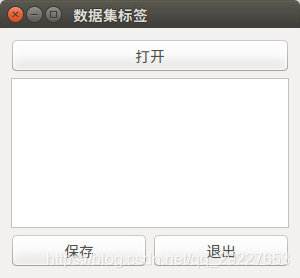
这是用来设置目标标签和种类名称,设置的方法有两种。
- 方法一:点击打开按钮,在$HOME/caffe/data/user_test选择labelmap_user_test.prototxt文件,这个文件中包含前一次训练的目标标签,可以接着进行编辑。
标签格式如下。
item{
name:"..."
label:x
display_name:"..."
}
name和display_name代表目标名称,与标注图片时命名的标签一致,label代表标签,以数字0开始,多一个目标数字依次加1,一般以背景(background)作为第一个目标,其label为0。假如目标是隔离开关(switch),那么标签文件内容设置成下面这样。
item{
name:"none_of_the_above"
label:0
display_name:"background"
}
item{
name:"switch"
label:1
display_name:"switch"
}
这是显示在文本框里的截图。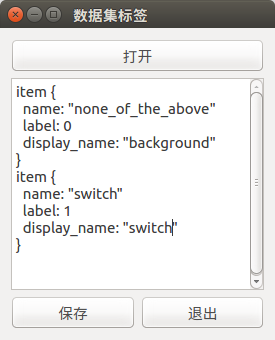
编辑完成后,点击保存按钮,然后退出。
- 方法二:直接在文本框里编辑,按照方法一中描述的格式进行编辑,编辑完成后保存,然后退出。
3.生成神经网络
点击生成神经网络按钮,将弹出一个叫做分类数量的窗口,窗口会提示请输入,此时输入数字=分类数目+1,输入完毕点击确认。
4.开始训练
开始训练按钮功能是训练目标检测模型,训练模型前需要设置一些参数,这些参数包括学习率(learning rate)、学习模式(lr_policy)、迭代次数(max_iter)、快照步长(snapshot)、训练模式(solver_mode)等。这些参数会影响到模型检测的平均正确率(mAP),经过多次的训练,这些参数已经有了经验值,此工具已经将这些经验值设置成默认参数。
只需点击开始训练即可开始训练目标检测模型,训练时命令行显示如下。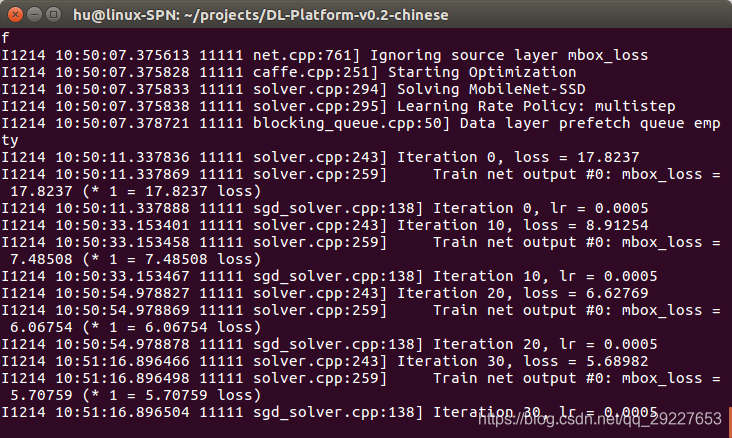
经过一段时间的等待,模型完成训练,完成训练的命令行显示如下。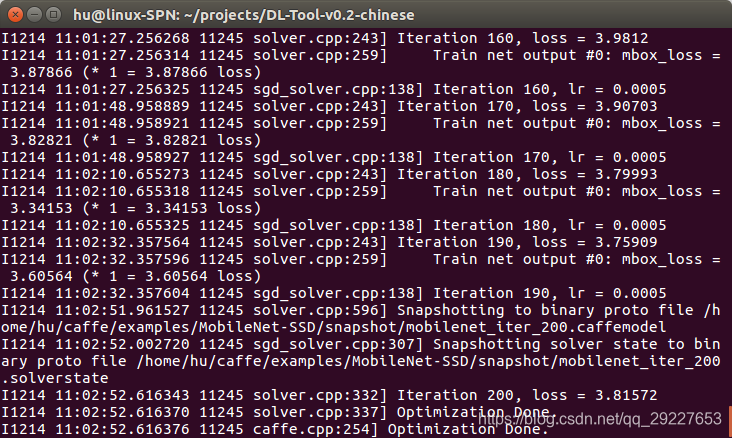
5.开始测试
开始测试按钮用来测试模型的平均精确率,可以在训练后进行测试,测试时命令行显示如下图。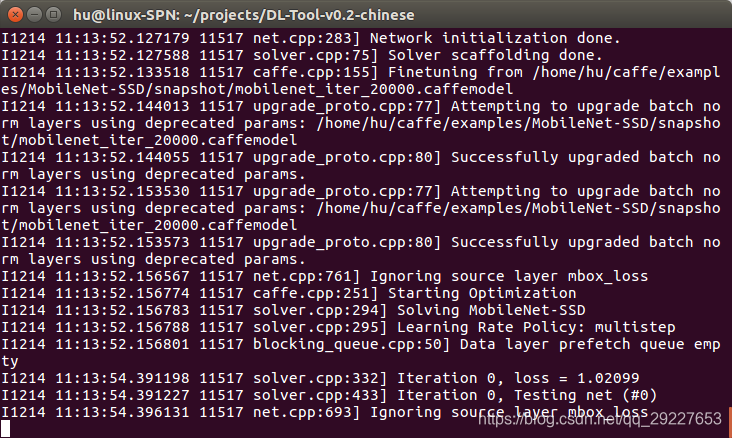
测试结束时,会有detection_eval显示在命令行,这个就是模型检测的平均精确率。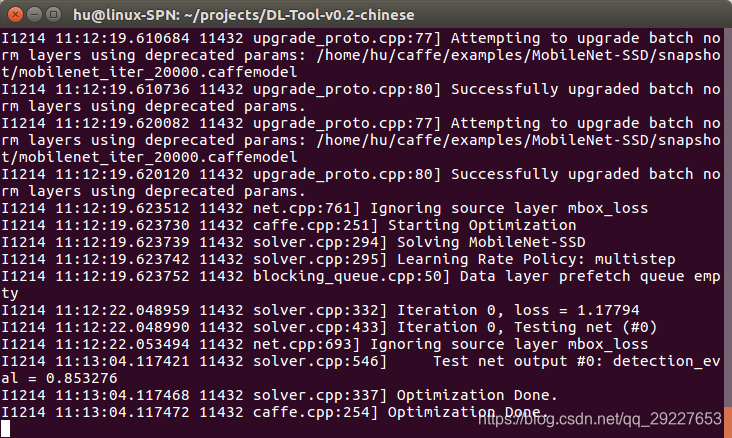
6.生成模型文件
生成模型文件按钮的功能是将bn层合并到卷积层中,相当于bn的计算时间就被节省了,可以提高检测速度,生成的二进制文件可以在C语言下被调用。点击此按钮,生成的二进制文件保存在$HOME/DLTool/models文件夹下。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)